1.本技术涉及冲压设备技术领域,具体是一种用于滤清器封盖冲压生产线的上料装置。
背景技术:
2.滤清器是一种用于过滤杂质或者气体的配件,多用于汽车发动机。现有的滤清器的生产,往往采用铁、铝、不锈钢等金属材质的外壳,外壳包括壳体和封盖两个部分,均由冲压片经过多道冲压而成,之后装上滤芯,再将壳体和封盖组装在一起。随着工业机器人技术的发展,越来越多的厂家希望用工业机器人代替人工生产,减少成本。现有的滤清器封盖的冲压生产线,包括多台冲床,需要多个对应的工人,如果能改造成机器人自动化生产线,将大大减少厂家成本。然而市场上的上料设备存在定位不精准,不适合不同大小工件,不能翻转工件的缺陷,不利于机械手夹取,也就不能满足滤清器封盖自动化冲压生产线上料的需求。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种定位精准、适用于不同大小工件且能够翻转工件,能很好地配合工业机器人的用于滤清器封盖冲压生产线的上料装置。
4.为实现以上目的,本实用新型提供如下技术方案:
5.一种用于滤清器封盖冲压生产线的上料装置,包括振动盘组件、桌子,所述的桌子上设有定位机构和翻转机构;
6.所述的振动盘组件包括振动盘本体、直振器和直振滑道;所述的直振器固定在桌子上,直振器上固定有直振滑道,直振滑道的出料口设置在直振滑道尾端的一侧;
7.所述的定位机构包括气缸安装座、升降气缸、无杆气缸、定位平台、推料板;所述的升降气缸通过气缸安装座固定在桌子上,所述升降气缸的顶部设有无杆气缸,所述无杆气缸包括沿水平方向滑动的外部滑块;所述定位平台的延伸部与无杆气缸的底部连接;所述的定位平台上设有两个第一挡料板,所述的两个第一挡料板所成夹角朝向直振滑道的出料口;所述无杆气缸的外部滑块上固设有用于推动工件到定位平台并抵靠在两个第一挡料板上的推料板;所述的定位平台在远离第一挡料板的一端设有向下延伸的第二挡料板,当升降气缸带动定位平台上升时,所述的第二挡料板能挡住直振滑道的出料口;
8.所述的翻转机构包括铝型材支架;所述的铝型材支架上安装有竖直设置的翻转气缸,所述的翻转气缸的输出端与吸盘支架一端的侧壁连接;吸盘支架的另一端固设有吸盘,所述的翻转气缸可带动吸盘翻转至定位平台的正上方。
9.更进一步的,所述的直振滑道的上方沿长度方向设有一个档杆,所述的档杆通过调节螺栓固定在直振滑道的侧壁上;所述调节螺栓可调节档杆到直振滑道侧壁的距离。
10.更进一步的,所述的档杆和直振滑道的上表面之间留有供推料板通过的空隙。
11.更进一步的,所述的振动盘本体的底部设有多个用于安装振动盘本体的限位环,所述的限位环包括套设在振动盘本体的支撑脚上的圆环和向外延伸的延伸板。
12.工作时,感应器检测到工件振动到出料口后,推料板推动工件到定位平台,并抵靠在两个第一挡料板上,推料板返回原位;感应器检测到定位平台上的工件后,升降气缸带动定位平台上升,第二挡料板挡住直振滑道的出料口,直振器可以继续振动;同时,翻转气缸带动吸盘支架翻转至定位平台正上方,吸盘抓取工件之后翻转180度朝上,工业机器人从吸盘上抓取工件。
13.与现有技术相比,本实用新型的有益效果是:定位准确,适用于不同大小工件,上料效率高、便于工业机器人抓取,一次加料后可以连续工作数小时,节省人工,易于使用和维修,更能满足滤清器封盖机器人自动化冲压生产线的上料需求。
附图说明
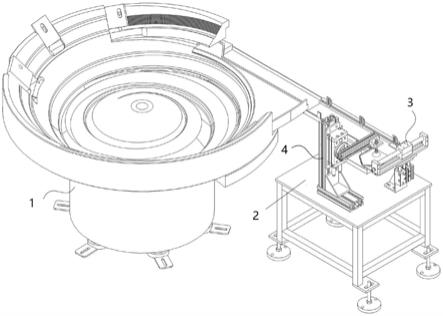
14.图1为本实用新型的结构示意图;
15.图2为本实用新型振动盘组件的结构示意图;
16.图3为本实用新型定位机构的结构示意图;
17.图4为本实用新型翻转机构的结构示意图;
18.图5为本实用新型定位平台的结构示意图;
19.图6为本实用新型档杆的结构示意图。
20.如图所示:振动盘组件1,振动盘本体1.1,直振器1.2,直振滑道1.3,出料口1.3.1,档杆1.3.2,限位环1.4,桌子2,定位机构3,翻转机构4,气缸安装座5,升降气缸6,无杆气缸7,外部滑块7.1,定位平台8,延伸部8.1,第一挡料板8.2,第二挡料板8.3,推料板9,铝型材支架10,翻转气缸11,吸盘支架12,吸盘13。
具体实施方式
21.如图所示,一种用于滤清器封盖冲压生产线的上料装置,包括振动盘组件1、桌子2,桌子2上设有定位机构3和翻转机构4。
22.振动盘组件1包括振动盘本体1.1、直振器1.2和直振滑道1.3;直振器1.2固定在桌子2上,直振器1.2上固定有直振滑道1.3,直振滑道1.3的出料口1.3.1设置在直振滑道1.3尾端的一侧。
23.定位机构3包括气缸安装座5、升降气缸6、无杆气缸7、定位平台8、推料板9;升降气缸6通过气缸安装座5固定在桌子2上,升降气缸6的顶部设有无杆气缸7,无杆气缸7包括沿水平方向滑动的外部滑块7.1;定位平台8的延伸部8.1与无杆气缸7的底部连接;定位平台8上设有两个第一挡料板8.2,两个第一挡料板8.2所成夹角朝向直振滑道1.3的出料口1.3.1;无杆气缸7的外部滑块7.1上固设有推料板9;定位平台8在远离第一挡料板8.2的一端设有向下延伸的第二挡料板8.3。
24.当工件到达出料口1.3.1时,推料板9推动工件到定位平台8并抵靠在两个第一挡料板8.2上,之后推料板9回到原位,升降气缸6带动定位平台8上升,第二挡料板8.3挡住直振滑道1.3的出料口1.3.1,此时直振器1.2可以继续振动送料。
25.翻转机构4包括铝型材支架10;铝型材支架10上安装有竖直设置的翻转气缸11,翻
转气缸11的输出端与吸盘支架12一端的侧壁连接;吸盘支架12的另一端固设有吸盘13。
26.定位平台8上升后,翻转气缸11带动吸盘13翻转至定位平台8的正上方并抓取工件,之后翻转180
°
使得吸盘13朝上,工业机器人从吸盘13上方抓取工件。
27.直振滑道1.3的上方沿长度方向设有一个档杆1.3.2,档杆1.3.2通过调节螺栓固定在直振滑道1.3的侧壁上;调节螺栓可调节档杆1.3.2到直振滑道1.3侧壁的距离,来适应不同大小的工件;档杆1.3.2和直振滑道1.3的上表面之间留有供推料板9通过的空隙,这样能适用于不同大小工件,并保证一些低矮的工件也能被推料板9推到。
28.振动盘本体1.1的底部设有多个用于安装振动盘本体1.1的限位环1.4,限位环1.4包括套设在振动盘本体1.1的支撑脚上的圆环和向外延伸的延伸板。圆环的内孔大于支撑脚的外周,先将圆环套在支撑脚上,再将延伸板向外拉紧并固定,即可完成振动盘本体1.1的安装。由于部分工件会残留在振动盘本体1.1内无法振出,当振动盘本体1.1需要清理余料或者维修时,可以便捷地将振动盘本体1.1从上方取下。
29.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。