1.本实用新型属于燃料电池制造技术领域,尤其涉及一种超轻空冷堆矩形截面金属波纹板成型机。
背景技术:
2.燃料电池是一种将燃料与氧化剂通过电催化反应直接转化为电能的发电装置。燃料电池主要由膜电极(mea)、双极板、集电极和端板构成;膜电极(mea)是燃料电池的核心,双极板是电池的重要组成部分,在燃料电池中起到收集电流、气体分配以及水管理、热管理的作用。
3.目前燃料电池双极板主要包括石墨双极板、金属双极板和复合双极板。由于金属材料具有导电、导热性好、机械强度高、容易薄片化、易加工等优点,成为了首选燃料电池双极板材料之一,世界各大公司及单位纷纷进行金属双极板的开发和研究。
4.金属双极板为波纹状,目前现有波纹板大多为梯形截面,且为大折弯角、大节距的波纹板,高宽比小于1,且成型钢板厚度较厚,成型大多采用级进冲压成型技术,技术较成熟。板材厚度较小(小于等于0.05mm)、高宽比大于等于1和节距小的波纹板有利于提高电池工作性能,但小节距矩形截面波纹板成型属于精密成型技术,实现原理较困难,目前大多成型机都无法加工该类型的金属双极板。
技术实现要素:
5.本实用新型的目的在于提供一种超轻空冷堆矩形截面金属波纹板成型机,以解决现有的成型机无法实现厚度小、高宽比大、节距小的波纹板成型的问题。
6.为了达到上述目的,本实用新型的技术方案为:一种超轻空冷堆矩形截面金属波纹板成型机,包括上工作机、下工作机和动力部;所述上工作机包括上模具、第一推杆和用于驱动第一推杆的第一驱动部,所述第一推杆用于推动上模具,所述第一驱动部用于间歇驱动所述第一推杆竖向往复周期性移动;所述下工作机包括下模具、第二推杆和用于驱动第二推杆的第二驱动部,所述第二推杆用于推动下模具,所述第二驱动部用于间歇驱动所述第二推杆竖向往复周期性运动以及水平往复周期性运动;在一个往复周期内,所述第一推杆的竖向运动、第二推杆的竖向运动在一个周期内分开运行;在一个往复周期内,所述第二推杆的水平往复运动的来回分别在所述第一推杆的竖向往复运动之后以及在第二推杆的竖向往复运动之后;所述动力部用于驱动所述第一驱动部和第二驱动部运动。
7.进一步,所述第一驱动部包括第一机架、第一驱动轮和第一凸轮;所述第一驱动轮转动连接在机架上;所述第一凸轮固定在所述第一驱动轮上,所述第一凸轮与第一驱动轮的轴线重合;所述第一推杆包括第一横杆和第一竖杆,所述第一横杆和第一竖杆形成t字形,所述第一机架上设有竖向的第一滑槽,所述第一竖杆竖向滑动连接在第一滑槽内;所述第一横杆与第一机架之间连接有第一弹性件,所述第一弹性件能够保证所述第一横杆与所述第一凸轮始终保持接触。
8.进一步,所述第二驱动部包括第二机架、第二驱动轮、第二凸轮和第三凸轮,所述第一凸轮和第二凸轮的结构相同;所述第二凸轮和第三凸轮固定在第二驱动轮上,所述第二驱动轮、第二凸轮和第三凸轮的轴线重合,所述第二凸轮用于驱动所述第二推杆竖向往复运动;所述第三凸轮用于驱动所述第二推杆横向往复运动;所述第二推杆包括第二横杆和第二竖杆,所述第一横杆和第一竖杆形成t字形;所述第二推杆上设有第二弹性件和第三弹性件,所述第二弹性件能够保证所述第二横杆与所述第二凸轮始终保持接触;所述第三弹性件能够保证所述第二竖杆与所述第三凸轮始终保持接触。
9.进一步,第二驱动部还包括限位组件,所述限位组件包括水平限位件和与水平限位件固定的竖向限位件;所述第二机架上设有水平的第二滑槽,所述水平限位件滑动连接在第二滑槽内;所述竖向限位件内设有竖向的第三滑槽,所述第二竖杆竖向滑动连接在第三滑槽内。
10.进一步,所述第一驱动轮和第二驱动轮之间通过同步带同步运动。
11.进一步,在一个运动周期内,所述第一凸轮和第二凸轮的推程运动角和回程运动角的比例为2:1,推程运动角和回程运动角共108
°
,剩余252
°
都为近休止角,远休止角为0
°
;第三凸轮的近休止角为108
°
,推程运动角为72
°
,远休止角为108
°
,回程运动角为72
°
。
12.本技术方案的工作原理在于:动力部驱动第一驱动轮或第二驱动轮运动,第一驱动轮和第二驱动轮通过同步带同步转动。第一推杆和第二推杆上下移动的行程相同,均为s1,第二推杆左右移动的行程为s2。在一个周期内(第一驱动轮和第二驱动轮同步转动360
°
)可分为四个阶段进行说明:
13.第一阶段:第一凸轮、第二凸轮和第三凸轮从0
°
开始转动,第一凸轮旋转72
°
,第一推杆时等速向下运动位移s1,第一弹性件被压缩或拉伸,第一凸轮继续旋转36
°
,第一推杆快速等速回到原位(位移为0),第一弹性件恢复原位,第一凸轮此时共旋转108
°
;与此同时第二凸轮和第三凸轮也同步旋转108
°
,在此过程中第二推杆既没有竖向运动,也没有横向运动;接下来第一凸轮从转角为108
°
开始,直到转过的角度为360
°
时,第一推杆始终没有在运动,也就是一个周期(360
°
),第一推杆只在开始0-108
°
范围有运动,其余都处于进休状态。
14.第二阶段:第一凸轮、第二凸轮和第三凸轮继续从108
°
转到180
°
,在此过程中,第三凸轮与第二推杆之间的凸轮副发生作用,实现第二推杆等速水平向右移动,位移为s2。在108
°
转到180
°
的过程中,第一推杆未发生竖向移动。
15.第三阶段:第一凸轮、第二凸轮和第三凸轮继续从180
°
转到252
°
,在此过程中,第三凸轮与第二推杆构成的凸轮副保持在远休止,第二凸轮和第二推杆构成的凸轮副使得第二推杆向上做等速运动,移动位移s1;第一推杆保持在初始位置。第一凸轮、第二凸轮和第三凸轮继续从252
°
转到288
°
,在此过程中,第三凸轮与第二推杆构成的凸轮副保持在远休止,第二凸轮和第二推杆构成的凸轮副使得第二推杆向下做等速运动,移动位移s1,速度是上升运动速度的2倍(因为为非受力工作状态),第一推杆继续保持在初始位置。
16.第四阶段:第一凸轮、第二凸轮和第三凸轮继续从288
°
转到360
°
,在此过程中,第三凸轮和第二推杆构成的凸轮副起作用,第二推杆向左等速移动(速度同向右时),同时第一推杆保持在初始状态,第二推杆没有竖向运动。
17.本技术方案的有益效果在于:
①
同步带既能缓冲和吸收机械机构工作过程中的振
动冲击,同时可实现上工作机和下工作机(相应第一凸轮、第二凸轮和第三凸轮)的同步动作。
②
通过第二凸轮和第三凸轮安装后成为一个整体,有利于协调一致工作。
③
限位组件能够使得第二推动杆各自在竖向、横向方向实现平面运动。
④
本技术方案能够对厚度小、高宽比大、节距小的波纹板进行成型。
附图说明
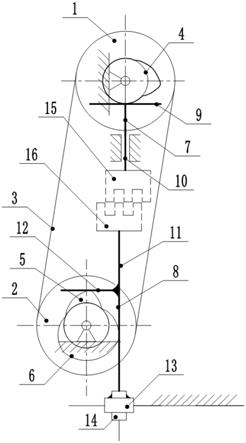
18.图1为本实用新型一种超轻空冷堆矩形截面金属波纹板成型机的工作原理图;
19.图2为第一凸轮的轮廓曲线图;
20.图3为第二凸轮的轮廓曲线图;
21.图4为第三凸轮的轮廓曲线图;
22.图5为第一凸轮、第二凸轮和第三凸轮在一个周期内的位移曲线图。
具体实施方式
23.下面通过具体实施方式进一步详细说明:
24.说明书附图中的附图标记包括:第一驱动轮1、第二驱动轮2、同步带3、第一凸轮4、第二凸轮5、第三凸轮6、第一推杆7、第二推杆8、第一横杆9、第一竖杆10、第二竖杆11、第二横杆12、水平限位件13、竖向限位件14、上模具15、下模具16。
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例基本如附图1-5所示:一种超轻空冷堆矩形截面金属波纹板成型机,包括上工作机、下工作机和动力部;上工作机包括上模具15、第一推杆7和用于驱动第一推杆7的第一驱动部,第一推杆7用于推动上模具15,第一驱动部用于间歇驱动第一推杆7竖向往复周期性移动。下工作机包括下模具16、第二推杆8和用于驱动第二推杆8的第二驱动部,第二推杆8用于推动下模具16,第二驱动部用于间歇驱动第二推杆8竖向往复周期性运动以及水平往复周期性运动;在一个往复周期内,第一推杆7的竖向运动、第二推杆8的竖向运动在一个周期内分开运行;在一个往复周期内,第二推杆8的水平往复运动的来回分别在第一推杆7的竖向往复运动之后以及在第二推杆8的竖向往复运动之后;动力部用于驱动第一驱动部和第二驱动部运动。
27.第一驱动部包括第一机架、第一驱动轮1和第一凸轮4;第一驱动轮1转动连接在机架上;第一凸轮4固定在第一驱动轮1上,第一凸轮4与第一驱动轮1的轴线重合;第一推杆7包括第一横杆9和第一竖杆10,第一横杆9和第一竖杆10形成t字形,第一机架上设有竖向的第一滑槽,第一竖杆10竖向滑动连接在第一滑槽内;第一横杆9与第一机架之间连接有第一弹性件,第一弹性件能够保证第一横杆9与第一凸轮4始终保持接触。
28.第二驱动部包括限位组件、第二机架、第二驱动轮2、第二凸轮5和第三凸轮6,第一凸轮4和第二凸轮5的结构相同;第二凸轮5、第三凸轮6和第二驱动轮2三者的轴线重合并且三者的旋转中心通过键连接,第二凸轮5用于驱动第二推杆8竖向往复运动;第三凸轮6用于驱动第二推杆8横向往复运动。第二推杆8包括第二横杆12和第二竖杆11,第一横杆9和第一
竖杆10形成t字形;第二推杆8上设有第二弹性件和第三弹性件,第二弹性件能够保证第二横杆12与第二凸轮5始终保持接触;第三弹性件能够保证第二竖杆11与第三凸轮6始终保持接触。第一驱动轮1和第二驱动轮2之间通过同步带3同步运动,动力部用于驱动第一驱动轮1或第二驱动轮2转动,动力部可以采用电机等。
29.限位组件包括水平限位件13和与水平限位件12固定竖向限位件14,本实施例中采用焊接。第二机架上设有水平的第二滑槽,水平限位件13滑动连接在第二滑槽内;竖向限位件14内设有竖向的第三滑槽,第二竖杆11竖向滑动连接在第三滑槽内。
30.第二弹性件和第三弹性件的具体设置位置可以是:第二弹性件的两端分别与竖向限位件14和第二竖杆11连接,第三弹性件的两端分别与水平限位件13和第二机架连接。也可以采用其他的可以达到相同目的连接方式。
31.在一个运动周期内,第一凸轮4和第二凸轮5的推程运动角和回程运动角的比例为2:1,推程运动角和回程运动角共108
°
,剩余252
°
都为近休止角,远休止角为0
°
;第三凸轮6的近休止角为108
°
,推程运动角为72
°
,远休止角为108
°
,回程运动角为72
°
。
32.具体实施过程如下:
33.动力部驱动第一驱动轮1或第二驱动轮2运动,第一驱动轮1和第二驱动轮2通过同步带3同步转动。第一推杆7和第二推杆8上下移动的行程相同,均为s1,第二推杆8左右移动的行程为s2。在一个周期内(第一驱动轮1和第二驱动轮2同步转动360
°
)可分为四个阶段进行说明:
34.第一阶段:第一凸轮4、第二凸轮5和第三凸轮6从0
°
开始转动,第一凸轮4旋转72
°
,第一推杆7时等速向下运动位移s1,第一弹性件被压缩或拉伸,第一凸轮4继续旋转36
°
,第一推杆7快速等速回到原位(位移为0),第一弹性件恢复原位,第一凸轮4此时共旋转108
°
;与此同时第二凸轮5和第三凸轮6也同步旋转108
°
,在此过程中第二推杆8既没有竖向运动,也没有横向运动;接下来第一凸轮4从转角为108
°
开始,直到转过的角度为360
°
时,第一推杆7始终没有在运动,也就是一个周期(360
°
),第一推杆7只在开始0-108
°
范围有运动,其余都处于进休状态。
35.第二阶段:第一凸轮4、第二凸轮5和第三凸轮6继续从108
°
转到180
°
,在此过程中,第三凸轮6与第二推杆8之间的凸轮副发生作用,实现第二推杆8等速水平向右移动,位移为s2。在108
°
转到180
°
的过程中,第一推杆7未发生竖向移动。
36.第三阶段:第一凸轮4、第二凸轮5和第三凸轮6继续从180
°
转到252
°
,在此过程中,第三凸轮6与第二推杆8构成的凸轮副保持在远休止,第二凸轮5和第二推杆8构成的凸轮副使得第二推杆8向上做等速运动,移动位移s1;第一推杆7保持在初始位置。第一凸轮4、第二凸轮5和第三凸轮6继续从252
°
转到288
°
,在此过程中,第三凸轮6与第二推杆8构成的凸轮副保持在远休止,第二凸轮5和第二推杆8构成的凸轮副使得第二推杆8向下做等速运动,移动位移s1,速度是上升运动速度的2倍(因为为非受力工作状态),第一推杆7继续保持在初始位置。
37.第四阶段:第一凸轮4、第二凸轮5和第三凸轮6继续从288
°
转到360
°
,在此过程中,第三凸轮6和第二推杆8构成的凸轮副起作用,第二推杆8向左等速移动(速度同向右时),同时第一推杆7保持在初始状态,第二推杆8没有竖向运动。
38.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实
体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
39.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。