1.本实用新型属于自动化清洗装置,特别涉及一种翻醅机清洗装置。
背景技术:
2.现有技术中的翻醅机的清洗均采用人工清洗的方式,在清洗过程中容易出现清洗的效率低下、人工清洗的清洗质量无法控制等缺陷。
技术实现要素:
3.实用新型目的:为了解决现有技术存在的问题,本实用新型提供了一种翻醅机清洗装置,结构简单、成本低、操作方便,能够清洗人工无法清洗的部位。
4.技术方案:本实用新型所述的翻醅机清洗装置,包括清洗管道、用于夹持清洗管道的机械臂以及用于控制所述机械臂运动的机器人;所述清洗管道横向架设于翻醅机的料斗上方,所述清洗管道上设置有若干横向设置的喷淋孔,所述清洗管道的进口分别与高压气管以及高压水管连通。
5.作为本实用新型的一种优选结构,所述清洗管道与机械臂的末端相连。
6.作为本实用新型的一种优选结构,所述翻醅机设置在醋池上方。
7.作为本实用新型的一种优选结构,所述机器人上设置有位置识别开关。
8.作为本实用新型的一种优选结构,所述醋池的两侧边设置有用于翻醅机移动的导轨。
9.作为本实用新型的一种优选结构,所述机器人设置于所述醋池末端。
10.作为本实用新型的一种优选结构,所述清洗管道为不锈钢材质制成。
11.作为本实用新型的一种优选结构,所述高压气管上设置有用于控制所述高压气管启闭的第一阀门。
12.作为本实用新型的一种优选结构,所述高压水管上设置有用于控制所述高压水管启闭的第二阀门。
13.作为本实用新型的一种优选结构,所述第二阀门的出口设置有用于高压水雾送入清洗管道的水管旁路。
14.有益效果:(1)本实用新型通过机器人控制机械臂夹持的清洗管道,当翻醅机停在终点位置,机器人感应到翻醅机之后,启动清洁功能。(2)本实用新型的清洗系统设置了分别与清洗管道连通的高压气管以及高压水管,通过先采用压缩空气,吹扫醋醅,在吹扫过程中翻醅机转动料斗;然后采用高压水雾清洗,在清洗过程中翻醅机转动料斗;最后采用压缩空气,吹干残留水,在吹扫过程中翻醅机转动料斗的清洗流程,可以全面彻底地清洗翻醅机,可灵活的实现翻醅机的料斗上下部清洁、实现料斗内部清洁、翻醅机里侧清洁。(3)本实用新型实现了翻醅机的自动清洁,与人工清洁相比,时间更短、清洁度更高、用水量极少、清洁无死角、效率高。(4)本实用新型的清洗管道采用不锈钢管,防止清洗介质腐蚀,提高工作寿命。
附图说明
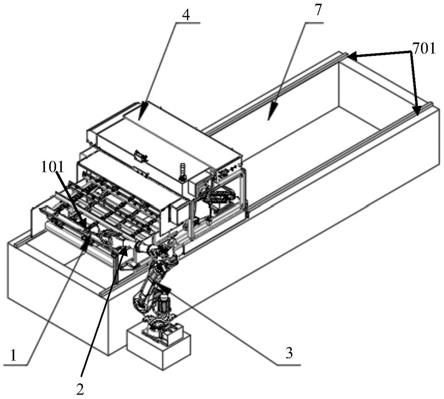
15.图1为本实用新型所述的翻醅机清洗装置的结构示意图;
16.图2为本实用新型所述的翻醅机清洗装置的清洗系统结构示意图。
具体实施方式
17.如图1所示的翻醅机清洗装置,包括清洗管道1、用于夹持清洗管道1的机械臂2以及用于控制机械臂2运动的机器人3,机器人3可以现有技术中可实现本实用新型目的的任一结构的机器人,如选择型号为frh系列的智能机器人。
18.清洗管道1横向架设于翻醅机4的料斗上方,本实施例中的清洗管道1为不锈钢材质制成,采用不锈钢管,防止清洗介质腐蚀,提高工作寿命。清洗管道1上设置有若干横向设置的喷淋孔101,清洗管道1与机械臂2的末端相连,清洗管道1的末端为封堵结构,清洗管道1的进口分别与高压气管5以及高压水管6连通。
19.翻醅机4设置在醋池7上方,醋池7的两侧边设置有用于翻醅机4移动的导轨701,翻醅机4通过导轨701的导向在醋池7上方运动。
20.机器人3上设置有位置识别开关,机器人3通过安装座8设置于醋池7末端,具体为设置在醋池7的末端旁边,通过安装座固定在工作台上,安装座与工作台可拆卸固定。机器人3设置在醋池7末端旁边便于机械臂2夹持清洗管道1,当翻醅机4通过导轨701运动至醋池7末端时,设置在机器人3上的位置识别开关检测到信号,并将信号反馈至机器人3的控制系统,机器人3通过机械臂2将清洗管道1架设在翻醅机4料斗的上方,并通过控制送入清洗管道1内的气体或者是液体实现翻醅机的清洗。
21.具体地,本实施例中采用的清洗系统包括高压气管5和高压水管6,清洗管道1的进口与一个连接总管102连通,如图2所示,高压气管5和高压水管6的出口均与连接总管102连通,高压气管5上设置有气动球阀作为第一阀门501,第一阀门501的进气口与用于送入高压气体的管道(图中未示出)连通,高压水管6的出口同样与连接总管102连通,在高压水管上设置有手动球阀作为第二阀门601用于控制高压水管6的启闭,在本实施例中,第一阀门501接口以及第二阀门601的接口均设置在连接总管102上,为了避免高压气管5与高压水管6共用的一段管道出现故障从而影响整个装置的运行,本实施例中,在第二阀门601的出口处设置有一段与高压气管5并联的管道作为水管旁路8,水管旁路8上设置有第三阀门801,本实施例中,第三阀门801同样为手动球阀,在正常工作状态下,第三阀门801处于关闭状态。当高压气管5与连接总管102的接头处出现故障,关闭第一阀门501,打开第二阀门和第三阀门同样可以实现清洗。
22.本实用新型所述的翻醅机清洗装置的工作方法为:
23.翻醅机4运行到清洗工位后停止工作,机器人3的位置识别开关接收到翻醅机4的位置信号后,控制机械臂2的运行,机器人3将清洗管道4架设到翻醅机4的料斗上方,先通过打开第一阀门501,通过高压气管5先将压缩空气送至清洗管道1,吹扫醋醅,在吹扫过程中翻醅机4转动料斗,以确保每个料斗都能吹扫干净;吹扫完成后关闭第一阀门501,打开第二阀门601,通过高压水管6将高压水雾送至清洗管道1,从清洗管道1的喷淋孔中喷出高压水雾,在清洗过程中翻醅机4转动料斗,以确保每个料斗都能清洗干净;清洗完成后,关闭第二阀门601,打开第一阀门501,清洗管道1喷出压缩空气,吹干残留水,在吹干过程中翻醅机4
转动料斗,以确保每个料斗都保持干燥。
24.在本实施例中,清洗介质为气体或液体。清洗介质不局限于水或者空气,只要是清洁的介质均可以用于清洗。
25.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
技术特征:
1.一种翻醅机清洗装置,其特征在于,包括清洗管道(1)、用于夹持清洗管道(1)的机械臂(2)以及用于控制所述机械臂(2)运动的机器人(3);所述清洗管道(1)横向架设于翻醅机(4)的料斗上方,所述清洗管道(1)上设置有若干横向设置的喷淋孔(101),所述清洗管道(1)的进口分别与高压气管(5)以及高压水管(6)连通。2.根据权利要求1所述的翻醅机清洗装置,其特征在于,所述清洗管道(1)与机械臂(2)的末端相连。3.根据权利要求1所述的翻醅机清洗装置,其特征在于,所述翻醅机(4)设置在醋池(7)上方。4.根据权利要求1所述的翻醅机清洗装置,其特征在于,所述机器人(3)上设置有位置识别开关。5.根据权利要求3所述的翻醅机清洗装置,其特征在于,所述醋池(7)的两侧边设置有用于翻醅机(4)移动的导轨(701)。6.根据权利要求5所述的翻醅机清洗装置,其特征在于,所述机器人(3)设置于所述醋池(7)末端。7.根据权利要求1所述的翻醅机清洗装置,其特征在于,所述清洗管道(1)为不锈钢材质制成。8.根据权利要求1所述的翻醅机清洗装置,其特征在于,所述高压气管(5)上设置有用于控制所述高压气管(5)启闭的第一阀门(501)。9.根据权利要求8所述的翻醅机清洗装置,其特征在于,所述高压水管(6)上设置有用于控制所述高压水管(6)启闭的第二阀门(601)。10.根据权利要求9所述的翻醅机清洗装置,其特征在于,所述第二阀门的出口设置有用于高压水雾送入清洗管道(1)的水管旁路(8)。
技术总结
本实用新型公开了一种翻醅机清洗装置,包括清洗管道、用于夹持清洗管道的机械臂以及用于控制所述机械臂运动的机器人;所述清洗管道横向架设于翻醅机的料斗上方,所述清洗管道上设置有若干横向设置的喷淋孔,所述清洗管道的进口分别与高压气管以及高压水管连通。本实用新型实现翻醅机的自动清洁,与人工清洁相比,时间更短、清洁度更高、用水量极少、清洁无死角、效率高。效率高。效率高。
技术研发人员:李信 李国权 曹爱东 张子蓬 夏强 谈文鑫 陈雯
受保护的技术使用者:江苏恒顺醋业股份有限公司
技术研发日:2021.08.23
技术公布日:2022/1/28