1.本发明涉及管道清洁领域,特别是涉及一种管道轴向移动装置及其清洁装置。
背景技术:
2.目前发电厂等工业行业高空管道内部的工作都是人工慢慢爬上去执行的,这种高空作业,人员爬上去是非常危险,并且高空作业的速度也很慢。
3.因此现在需要一种可以电动在管道内部爬行的装置来解决上述问题。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种管道内部轴向移动装置及其清洁装置,其中包括有攀爬装置,包括主轴,第一支撑件和第二支撑件,通过主轴的上下滑动和两个支撑件的循环伸缩,解决了电动攀爬的问题;还包括转动部,包括有传动轴,其连接于与竖齿轮互相啮合的皇冠齿轮,实现传动轴的竖向转动,还包括由横向驱动部,驱动传动轴在横向转动,传动轴在两个方向上的360
°
的转动,解决了在管道内灵活检测或清洁等功能,进一步通过在传动轴上连接出风部,解决的管道内部的清洁问题。
5.在本技术的一些实施例中,提供了一种管道内部轴向移动装置,包括:攀爬装置,所述攀爬装置包括有主轴,第一支撑件和第二支撑件,所述第一支撑件连接于所述主轴,所述第二支撑件可滑动的连接于所述主轴;所述第一支撑件包括有可伸缩的第一支架,所述第一支架的两端抵在管道内壁上,用于支撑所述清洁装置停留在管道内部;所述第二支撑件包括有可伸缩的第二支架,所述第二支架的两端抵在管道内壁上,用于支撑所述清洁装置停留在管道内部;转动部,所述转动部固定连接于所述主轴的一端,所述转动部包括:竖齿轮和皇冠齿轮,所述竖齿轮和所述皇冠齿轮互相啮合,且由第一电机驱动所述竖齿轮转动,进而驱动所述皇冠齿轮以竖向方向为轴作转动;传动轴和横向驱动部,所述传动轴穿设过所述皇冠齿轮的连接部,随所述皇冠齿轮共同做竖向转动,所述传动轴还连接于所述横向驱动部,所述横向驱动部驱动所述传动轴横向转动。
6.在本技术的一些实施例中,所述横向驱动部包括:第二电机,第一锥齿轮和第二锥齿轮,所述第二电机设置在竖向,且与所述第一锥齿轮连接,用于驱动所述第一锥齿轮,所述第二锥齿轮与所述第一锥齿轮啮合,所述传动轴连接于所述第二锥齿轮,由所述第二锥齿轮驱动转动。
7.在本技术的一些实施例中,所述皇冠齿轮的连接部为:在齿纹的另一面设置垂直的挡板即为所述连接部,在所述挡板上设置相对的圆孔,所述传动轴穿设过所述圆孔
8.在本技术的一些实施例中,所述主轴包括主液压缸,所述主轴设置为所述主油缸,所述主油缸包括主缸体和主活塞杆;所述第一支撑件包括第一液压缸,所述第一液压缸垂直连接于所述主缸体外侧;所述第二支撑件包括第二液压缸,所述第二液压杆垂直连接于所述主活塞杆。
9.在本技术的一些实施例中,所述第一支撑件和所述第二支撑件包括有耐磨防滑
垫,分别设置在所述第一支撑件和所述第二支撑件与管道相抵的两端。
10.在本技术的一些实施例中,转动部包括:主架盖,所述主架盖设置在所述皇冠齿轮的下侧,所述主架盖为上表面和侧表面的开口连通的壳体,所述第二电机设置在所述主架盖的内部,所述第二电机的电机轴由上表面的开口伸出,所述竖齿轮设置在侧表面的开口处。
11.在本技术的一些实施例中,还包括:激光测距装置,所述激光测距装置通过向目标物体发射激光并接收反射激光,计算得到所述移动装置与目标物体之间的距离;控制器,所述控制器接收所述激光测距装置的测量结果和控制指令,生成所述攀爬装置和所述转动部的驱动信号。
12.在本技术的一些实施例中,还提供了一种管道内部清洁装置,包括管道内部轴向移动装置,还包括:出风部,所述出风部的一端与所述传动轴连接,随所述传动轴转动,所述出风部的另一端设置有出风口,用于吹出用于清洁灰尘的气流。
13.在本技术的一些实施例中,所述出风部包括:出风马达和出风嘴,所述出风嘴的一端与所述出风马达连通,另一端为出风口,且所述出风嘴为流线型结构,中部的口径大于所述出风口的口径。
14.在本技术的一些实施例中,所述出风部还包括:马达架,所述马达架的一端为一个容纳腔,用于容纳所述出风马达,所述马达架的另一侧为一个吊环,所述吊环上还设置有通孔,所述传动轴穿设过所述通孔,与所述马达架相对固定连接。
15.本发明实施例与现有技术相比,其有益效果在:
16.(1)在主液压缸旁设置有第一液压缸和第二液压缸,每组固定一个比较硬的耐磨防滑件,首先是第二液压缸通过控制器控制让其先运动顶到旁边的管道内壁,这样移动装置将固定在管道上,然后第一液压缸退回去,控制器控制主液压缸向上运动,然后第一液压缸向两边运动顶到高空管道的内壁,然后第二液压缸退回去,主液压缸向上缩回运动,依次循环向上爬行运动或向下爬行运动,通过液压缸循环传动,实现了攀爬动作。
17.(2)提供了一种可以通过电机,竖齿轮,皇冠齿轮,锥齿轮组合而成的三维空间工作的机器手臂,由皇冠齿轮和竖齿轮的传动,使传动轴在横向方向上360度的转动,通过两个锥齿轮的啮合,使传动齿在竖向方向上对360度的转动,通过设置主架盖容纳锥齿轮的第二电机和竖齿轮,使两个方向的运动互不影响的改变传动轴的抓住弄的转动,进而后续对传动轴的进一步连接其他设备,实现了管道内部的多维度作业。
18.(3)通过设置激光测距装置,使移动装置具有测距的功能,并将数据传输至控制器,根据预设的程序进行自动化执行作业的功能,提高了移动设备的智能化。
19.(4)进一步提出了一种清洁装置,在清洁装置中加装流道形设计,中间凸,出风口细的出风嘴,有利于储备风在一个风肚子里,然后通过出风马达的压力作用,将风嘴肚子里的风通过风压倍增原理,路径由大到小的原理,可以让风更加强劲的到风嘴的出口去,从而可以把高空管道内的脏污,污渍等杂物顺势轻易带走清除干净。
附图说明
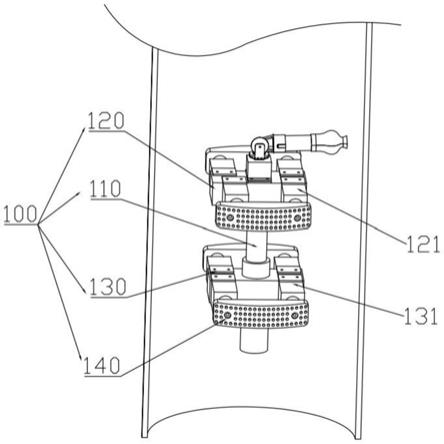
20.图1是本发明实施例中移动装置的结构图;
21.图2是本发明实施例中清洁装置的截面图;
22.图3是本发明实施例中图2的a部分的细节图;
23.图4是本发明实施例中清洁装置的爆炸图;
24.图5是本发明实施例中清洁装置的结构图;
25.图6是本发明实施例中图5中b部分的细节图。
26.图中,100、攀爬装置;110、主轴;111、主缸体;112、主活塞杆;120、第一支撑件;121、第一支架;122、第一液压缸;130、第二支撑件;131、第二支架;132、第二液压缸;140、耐磨防滑垫;200、转动部;210、竖齿轮;220、皇冠齿轮;221、连接部;230、第一电机;240、传动轴;250、横向驱动部;251、第二电机;252、第一锥齿轮;253、第二锥齿轮;260、主架盖;270、激光测距装置;280、控制器;300、出风部;310、出风马达;320、出风嘴;330、马达架。
具体实施方式
27.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
28.在本技术的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
29.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
30.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
31.如图1-6所示,在本技术的一些实施例中,提供了一种管道内部轴向移动装置,其中包括有攀爬装置100和转动部200。
32.在本技术的一些实施例中,攀爬装置100包括有主轴110,第一支撑件120和第二支撑件130。
33.其中第一支撑件120连接与主轴110,第二支撑件130可滑动过的连接于主轴110,第一支撑件120包括有可伸缩的第一支架121,当第一支架121伸展时,第一支撑件120抵在管道内壁上,用于支撑所述清洁装置停留在管道内部;第二支撑件130包括有可伸缩的第二支架131,当第二支架131伸展时,第二支架131的两端抵在管道内壁上,用于支撑所述清洁装置停留在管道内部,
34.具体的攀爬过程为:初始状态为第二支架131伸展后抵在内壁上支撑移动装置,第一支架121回缩,当攀爬开始后,主轴110相对于第二支架131向上移动,移动到最大限度后,第一支架121伸展抵在内壁上支撑移动装置,第二支架131回缩,第二支架131相对于主轴110向上滑动,滑动到最大限度后,第二支架131伸展抵在内壁上支撑移动装置,第一支架
121回缩,主轴110再一次相对于第二支架131向上移动,依次循环执行上述过程即可实现在管道内部的攀爬。
35.需要说明的是,利用本技术保护的结合,以相反的运动方向,向下移动,或向任意方向移动的方式,或设置两个以上的支撑件时,其中两个支撑件为本技术所保护的结构和工作方式都属于本技术的保护范围。
36.在本技术的一些实施例中,主轴110具体包括主液压缸,主液压缸包括缸体和主活塞杆112。
37.第一支撑件120包括第一液压缸122,第二支撑件130包括第二液压缸132。
38.第一液压缸122垂直连接于主缸体111的外侧,第二液压缸132垂直连接于主活塞杆112,主缸体111和主活塞杆112之间的滑动,带动第二液压杆相对于主轴110的滑动。
39.在一些的实施例中,主轴110还包括有安装台,安装台设置在主液压缸上与支撑件连接的位置,第一液压缸122和第二液压缸132上设置有安装挡板,安装挡板通过螺钉固定连接在安装台上,由此实现第一液压缸122和主缸体111的连接,第二液压缸132和主活塞杆112的连接。
40.在本实施例中,具体的攀爬方式为:初始状态为第二液压缸132伸展顶在内壁上支撑移动装置,第一液压缸122回缩,当攀爬开始后,主缸体111向上移动,移动到最大限度后,第一液压杆伸展抵在内壁上支撑移动装置,第二液压缸132回缩,主活塞杆112回缩,回缩到最大限度后,第二液压缸132伸展抵在内壁上支撑移动装置,第一液压缸122回缩,主缸体111再一次向上移动,依次循环执行上述过程即可实现在管道内部的攀爬。
41.在本技术的一些实施例中,第一支撑件120和第二支撑件130包括有耐磨防滑垫140,分别设置在第一支撑件120和第二支撑件130与管道相抵的两端。
42.优选的,耐磨防滑垫140选用较硬的材质,和或在其表面设置小凸起以增加摩擦力。
43.在本技术的一些实施例中,每组液压缸包括有有四个小油缸,分设在主轴110的两侧,每侧设置有两个,以增加对移动装置的支撑力。
44.在本技术的一些实施例中,转动部200设置在主轴110的一端,转动部200包括有竖齿轮210,皇冠齿轮220传动轴240和横向驱动部250。
45.其中竖齿轮210和皇冠齿轮220属于一个传动机构没横向驱动部250为一个传动机构,两个传动机构分别驱动传动轴240可以实现在两个方向上的360
°
的转动。
46.在本技术的一些实施例中,竖齿轮210和皇冠齿轮220互相啮合,由第一电机230驱动竖齿轮210转动,进而驱动皇冠齿轮220以竖向方向为轴做竖向转动,传动轴240与皇冠齿轮220的连接部221连接,与皇冠齿轮220做共同的竖向转动。
47.在本技术的一些实施例,皇冠齿轮220的连接部221为:在齿纹的另一面设置垂直的挡板即为连接部221,在挡板上设置相对的圆孔,传动轴240穿设过圆孔,传动轴240随皇冠齿轮220做径向转动。
48.在本技术的一些实施例中,传动轴240与横向转动部200的轴心连接,随横向转动部200的转动作自转。
49.在本技术的一些实施例中,横向转动部200包括第二电机251,第一锥型齿和第二锥型齿。
50.第二电机251设置在竖向方向上,第二电机251驱动第一锥齿轮252转动,第一锥齿轮252与第二锥齿轮253啮合,进而驱动第二锥齿轮253在竖向上转动,传动轴240与第二锥齿轮253的轴心连接,使传动轴240随第二锥齿轮253转动,实现传动轴240的轴向自转。
51.本实施例提供了一种可以通过电机,竖齿轮210,皇冠齿论,锥齿轮组合而成的三维空间工作的机器手臂,此工作原理是通过两组齿轮组合形成的两种方向的运动,一种是通过电机带动锥齿轮组转动,锥齿轮组带动传动轴240竖向360度运动,另一组是另一个电机带动皇冠齿座下的皇冠齿横向360度运动,皇冠齿轮220在运动的同时,带动转动轴做竖向转动。
52.在本技术的一些所述实施例中,第一锥齿轮252和第二锥齿轮253设置在皇冠齿轮220的内部,第二电机251设置在皇冠齿的下部,且皇冠齿轮220的中心开设一孔,以使第二电机251的电机轴穿过皇冠齿后驱动第一锥齿轮252。
53.在本技术的一些实施例中,转动部200还包括主架盖260,主架盖260设置在皇冠齿轮220的下侧,主架盖260为上表面和侧表面的开口连通的壳体,第二电机251设置在所述主架盖260的内部,竖齿轮210设置在侧表面的开口处,第二电机251的电机轴由上表面的开口伸出,伸出后穿过皇冠齿轮220与第一锥齿轮252连接。
54.需要说明的是,将锥齿轮组中的两个锥齿轮设置在一个皇冠齿轮220内部,同时将第二电机251放置在竖齿轮210和皇冠齿轮220围成的空余空间中,节省了转动部200的空间,还通过设置一主架盖260对整个传动组件起到了支撑作用,增加了穿哦对那个过程中过的稳定性。
55.在本技术的一些实施例中,移动装置还设置有激光测距装置270和控制器280。
56.其中激光测距装置270通过向目标物体发射激光并接收反射激光,计算得到所述移动装置与目标物体之间的距离。
57.控制器280接收所述激光测距装置270的测量结果和控制指令,生成所述攀爬装置100和所述转动部200的驱动信号。
58.具体的控制指令为用户在使用移动设备时根据管道内部情景实时做出的执行指令,或是将提起那预设好的控制程序储存在控制器280中,由控制器280生成控制指令。
59.控制器280还与主轴110,第一支撑件120,第二支撑件130,竖齿轮210和横向驱动部250的驱动装置电连接,以向上述部件发送驱动信号。
60.具体的控制器280与主液压缸,第一液压缸122,第二液压缸132,第一电机230和第二电机251电连接。
61.在本技术的一些实施例中,传动轴240上可以连接有其他需要在管路内移动并多角度多维度转动的功能部件,例如可以实现清煤灰、冲洗、摄影、检查等功能,以最大程度利用本实施例中提出的管道内部轴向移动装置。
62.在本技术的一些实施例中,还提出了一种管道内部清洁装置,该装置包括了上述实施例中的移动装置,还包括有出风部300,出风部300用于吹出气流,以实现对管路中灰尘状杂质的清洁。
63.出风部300的一端与传动轴240连接,随传动轴240转动,出风部300的另一端设置有出风口,用于吹出用于清洁灰尘的气流。
64.在上述移动设备的描述中可知,传动轴240可以在竖向和横向上实现360度转动,
因此出风部300可以随传动轴240实现多角度多维度的转动,以扩大出风部300的清洁范围。
65.在本技术的一些实施例中,出风部300包括有出风马达310和出风嘴320,出风嘴320的一端与出风马达310连通,另一端为出风口,出风嘴320为流线型的结构,中部的口径大于出风口的口径。
66.出风马达310出风后,通过流线型出风嘴320吹出气流,这样设计有利于储备风在一个风肚子里,然后通过出风马达310的压力作用,将风嘴肚子里的风通过风压倍增原理,路径由大到小的原理,可以让风更加强劲的到出风口,从而可以把管道内的脏污,污渍等杂物顺势轻易带走清除干净。
67.在本技术的一些实施例中,出风马达310为数码马达。
68.在本技术的一些实施例中,出风部300还包括有马达架330,马达架330的一端为一个容纳腔,用于容纳出风马达310,马达架330的另一侧为一个吊环,吊环上设置有通孔,传动轴240穿设过通孔,与马达架330相对固定连接。
69.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。