1.本发明涉及水体修复领域,尤其涉及一种河道黑臭水体原位修复无人船。
背景技术:
2.河道水体黑臭是由于工业废水和生活污水大量排入河道导致的,目前,黑臭水体修复技术的研究主要集中在原位修复技术和组合修复技术等黑臭水体修复工艺方法上,对于黑臭水体修复装备的研发较少。因此,急需研发新型的黑臭水体修复装备,以提高修复效果和作业效率、降低操作难度和健康危害。
3.现有的黑臭水体修复装备主要有:漂浮式修复装置、固定式修复装置、沉浸式修复装置、过滤式修复装置等。漂浮式修复装置主要有生态浮岛、微生物浮岛、净化船等,生态浮岛一般是由漂浮座、净化座、生态种植槽和曝气装置等组成;微生物浮岛是由生物浮岛主体、填充了微生物填料的生物柱、微纳米气泡发生器和植物栽培孔等组成;净化船是由船体(30)和船上的好氧生物转盘处理装置等组成。固定式修复装置主要有生态原位修复处理设备、长效生态修复装置、微生物立体修复装置等,生态原位修复处理设备是由混凝土底座、生物反应装置和微曝气器等组成;长效生态修复装置是由生态浮床、缓释网箱和连接至河岸的复氧装置等组成;微生物立体修复装置是由固定在水体底部的主体支架、超细纤维立体填料、连接至河岸的曝气装置等组成。沉浸式修复装置主要有潜水式生态修复水立方等,潜水式生态修复水立方是由悬挂用的钢索、网状骨架、沉水植物及种植界面、微生物填料、光源等组成。过滤式修复装置主要有长方体形修复装置、生态修复净化装置等,长方体形修复装置是由矩形外壳、进水口、垃圾收集箱、电解棒、消毒层、除臭层和出水口等组成;生态修复净化装置是由防腐蚀固定管、内部过滤管、过滤板、微生物附着装置等组成。现有的黑臭水体修复装备存在修复作业范围小、装备利用效率低、实施过程难度大、更换维护不方便、工人健康危害大等问题。
技术实现要素:
4.发明目的:本发明目的是提供一种河道黑臭水体原位修复无人船,采用无线遥控无人船机械设备工作以实现大面积高效率的黑臭水体原位修复作业,提高黑臭水体修复作业的安全性、快速性和便利性。
5.技术方案:一种河道黑臭水体原位修复无人船,包括船体行驶系统、混凝液投加系统、鼓风曝气系统、碳纤维生态草投放系统、自动控制系统和供电系统;船体行驶系统用于控制无人船的前行停止、左右转向、加减速行驶;混凝液投加系统用于向河水里投加适量的混凝液以去除黑臭水体中的有机物和污染物;鼓风曝气系统用于向河水里均匀地吹入细小气流以增加水体中的溶解氧;碳纤维生态草投放系统用于向河水里投放碳纤维生态草以提供微生物附着的载体,形成较大生物量对水体中有机物进行有效降解;自动控制系统用于在河岸上通过手机无线操控无人船上的电气设备驱动机械装置工作;供电系统为无人船上用电设备提供电源。
6.船体行驶系统包括:船体内底部设有甲板,船体推进电机安装在船体内后部的甲板上,叶轮安装在船体后下方外侧的左右居中位置,船体推进电机经船体推进处联轴器与叶轮连接,叶轮的回转轴穿过船体后下方的薄壁处密封处理,船体推进电机带动叶轮转动产生推力,船体推进电机的转速决定了船体行进速度;船体内后部安装方向舵驱动电机和方向舵驱动机构;方向舵驱动机构下方安装方向舵,并且方向舵处于叶轮正后方的左右居中位置;方向舵驱动机构由曲柄滑块机构与滚珠丝杠串联组成,曲柄滑块机构中的滑块为方形螺母,其中,转动副a的配合预留间隙以防卡死现象;方向舵驱动电机的正/反转带动滚珠丝杠上的方形螺母向右/左移动,方形螺母向右/左移动带动方向舵向右/左转动使得船体向右/左转向;方向舵驱动电机的正/反转的圈数越多,方形螺母向右/左移动的距离越大,船体向右/ 左转向角度越大;在滚珠丝杠左/右两端安装左/右转向限位开关,控制方向舵的转角范围在
±
50
°
内。
7.混凝液投加系统包括:船体的前部机架安装有储液箱,储液箱上部安装搅拌电机,搅拌电机下方连接搅拌叶片,搅拌叶片位于储液箱内部;储液箱下部连接混凝液投加管,混凝液投加管上依次装有旋转阀、流量计、混凝液投加电磁阀,混凝液投加管下端左右对称地设有分叉的两根紧贴船体的混凝液出液管,混凝液出液管上设有多个细管,细管从船体穿出朝向河面;搅拌电机转动时带动3个间隔120
°
分布搅拌叶片转动,使得储液箱内的混凝液搅拌均匀。通过观察流量计的读数,并手动调节旋转阀来设置混凝液的流量大小。混凝液投加电磁阀在电信号控制下控制混凝液是否向河水中投加。多个散开布置的细管实现向较大氛围的河水中内均匀投加混凝液。
8.鼓风曝气系统包括:甲板中后部居中位置安装有空气压缩机,机架的中部左右两侧分别安装两个电动推杆,电动推杆的下端连接一根推转管,推转管的回转轴横穿船体,每根推转管的下端都连接一根曝气杆,曝气杆上设有多个微型曝气孔,曝气杆的末端都装有盖子,曝气杆与空气压缩机通过输气管相连接,空气压缩机与输气管连接处装有输气电磁阀;电动推杆在电信号控制下控制推转管展开或收起,与推转管固联的曝气杆也随之展开或收起;在船体两侧安装展开限位开关,限制曝气杆展开到河水里的深度;空气压缩机连接的继电器受电信号控制启动或停止其进行空气压缩,输气电磁阀受电信号控制压缩空气是否输出到输气管中;输气管将压缩空气输出到曝气杆内,微型曝气孔将曝气杆内的压缩空气以细小气流向外吹出;曝气杆的末端的盖子,可以拧开或装回,以排出曝气杆中的积水。
9.碳纤维生态草投放系统包括:机架的后部安装有储草箱,储草箱底部出口安装碳纤维生态草投放控制叶片;储草箱下部安装碳纤维生态草投放驱动电机和碳纤维生态草投放处联轴器,并与碳纤维生态草投放控制叶片相连接;储草箱内盛放碳纤维生态草并通过底部出口排除;碳纤维生态草在重力作用下可逐渐向储草箱底部出口移动;5个碳纤维生态草投放控制叶片间隔72
°
分布,当碳纤维生态草投放控制叶片不转时,圆柱状颗粒的碳纤维生态草无法从储草箱底部出口排出;当碳纤维生态草投放控制叶片转动时,圆柱状颗粒的碳纤维生态草从储草箱底部出口排出,并经出料槽滚落到河水中。碳纤维生态草投放驱动电机转动带动碳纤维生态草投放控制叶片转动,碳纤维生态草投放驱动电机转动速度决定了向河水中投放碳纤维生态草的速度。
10.自动控制系统包括:安装在电气控制柜内的plc和继电器,触摸屏安装在电气控制柜外侧面,各个传感器安装在船体左右两侧;船体行驶按钮、用于检测无人船与障碍物之间
距离的超声波传感器、船体转向按钮、左/右转向限位开关、混凝液搅拌按钮、混凝液投加按钮、空气压缩机按钮、曝气杆展开或收起按钮、左 /右侧展开限位开关、鼓风曝气按钮、碳纤维生态草投放按钮与plc输入端信号连接;船体推进电机、方向舵驱动电机、搅拌电机、混凝液投加电磁阀、空气压缩机、左/右侧电动推杆、左/右侧输气电磁阀、碳纤维生态草投放驱动电机与plc 输出端信号连接,plc运算后向各个继电器、各个电磁阀等输出信号,从而驱动各个电动机、各个电动推杆、各个电磁阀等工作。
11.无线通信系统包括:安装在电气控制柜内的plc和nb-iot无线网关;通过安装在电气控制柜外侧面的触摸屏调试无人船作业模式;或者通过手机app进行无线通讯遥控。
12.供电系统包括蓄电池组和电源逆变器,蓄电池组可提供400w的直流电,或经电源逆变器逆变成220v的交流电,供无人船上的各用电设备使用。
13.优选地,鼓风曝气系统向河水深度1.5m范围内均匀地吹入细小气流。
14.优选地,碳纤维生态草由水溶胶粘接成圆柱颗粒状,利用该形状及自身重力,方便从出口排出,及时有效地落入河水中。
15.工作原理:河道黑臭水体原位修复无人船作业时,由船体推进电机带动叶轮转动产生推动力、并由方向舵驱动电机通过驱动机构带动方向舵转动实现船体转向;搅拌电机带动搅拌叶片转动,使混凝液在储液箱里保持搅匀状态,再通过混凝液投加电磁阀控制混凝液从多个细管口投加到河道水体中;空气压缩机产生的压缩空气经输气电磁阀输入曝气杆,电动推杆将曝气杆转到河道水体较深处,曝气杆上的多个微型曝气孔持续向水体中曝出压缩空气;储草箱中放满圆柱状颗粒的碳纤维生态草,碳纤维生态草投放驱动电机带动储草箱底部出口处的碳纤维生态草投放控制叶片转动,以连续平缓地向河道水体里投放碳纤维生态草;蓄电池组对各个电动机、各个电磁阀、电气控制柜进行供电,电气控制柜接收河岸上发来的控制信号、并驱动各个电动机和各个电磁阀工作,实现无人化作业。
16.有益效果:与现有技术相比,本发明具有如下的显著优点:无人船将“鼓风曝气、投加混凝液、投放碳纤维生态草”多种修复技术联合使用,修复效果显著、有效、作业效率高、作业范围大,能够在河面上“s”型地移动作业以覆盖整个河面范围;无人船操控方便,工人在河岸上远程即可控制该无人船作业;作业安全性高,工人在进行黑臭水体修复作业时受到的健康危害小;无人船作业成本低,一只该无人船即可移动式进行大面积河面的黑臭水体修复作业;无人船对黑臭水体修复技术的可调整性好,可以投加不同配方的混凝液、投放不同类型的生物膜载体等已实现最优化的修复效果。
附图说明
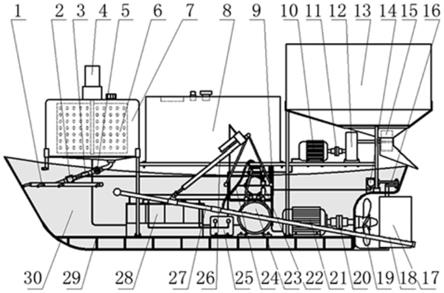
17.图1为本发明的无人船结构示意图;
18.图2为本发明的方向舵驱动机构示意图;
19.图3为本发明的混凝液投加装置结构图;
20.图4为本发明的鼓风曝气装置结构图;
21.图5为本发明的碳纤维生态草投放装置结构图;
22.图6为本发明的自动控制系统示意图;
23.图7为本发明的无线通信示意图。
具体实施方式
24.下面结合附图对本发明的技术方案作进一步说明。
25.如图1所示,河道黑臭水体原位修复无人船主要由船体行驶系统、混凝液投加系统、鼓风曝气系统、碳纤维生态草投放系统、自动控制系统和供电系统等组成。船体行驶系统实现无人船的前行、左右转向、加减速行驶、停止等。混凝液投加系统实现向河水里投加适量的混凝液,以便在一段时间内迅速去除黑臭水体中的有机物和污染物。鼓风曝气系统实现向河水里深度1.5m范围内均匀地吹入细小气流,以增加水体中的溶解氧。碳纤维生态草投放系统向河水里投放由水溶胶粘接成圆柱状颗粒的碳纤维生态草,为微生物提供附着载体,以形成较大生物量对水体中有机物进行有效降解。自动控制系统实现在河岸上通过手机无线操控无人船上的电气设备,并由电气设备驱动各机械装置工作。供电系统为无人船上用电设备提供直流电和交流电。
26.如图1、图2所示,船体行驶系统由船体30、甲板29、船体推进电机21、船体推进处联轴器20、叶轮19、方向舵驱动电机14、方向舵驱动机构16、方向舵 17等组成。船体30长度2.2m左右、宽度0.97m左右、型深105mm左右。船体推进电机21安装在船体30内后部的甲板29上,叶轮19安装在船体30后下方外侧的左右居中位置,船体推进电机21经船体推进处联轴器20与叶轮19连接,叶轮 19的回转轴穿过船体30后下方薄壁处要进行密封处理,船体推进电机21带动叶轮19转动产生向前的推进力,船体推进电机21的转速决定了船体30行进速度。船体30内后部安装方向舵驱动电机14和方向舵驱动机构16;方向舵驱动机构16下方安装方向舵17,并且方向舵17处于叶轮19正后方的左右居中位置。方向舵驱动机构16由曲柄滑块机构与滚珠丝杠串联而成,方形螺母141用作滑块,其中,转动副a的配合间隙留得稍大一些,以防出现卡死现象。方向舵驱动电机14的正反转带动滚珠丝杠上的方形螺母141向右左移动,方形螺母141向右左移动带动方向舵17向右左转动,进而使得船体30向右左转向。方向舵驱动电机14的正反转的圈数越多,方形螺母141向右左移动的距离就越大,船体30向右左转向角度就越大。在滚珠丝杠左右两端安装左右转向限位开关,控制方向舵17的转角范围在
‑ꢀ
50
°
~+50
°
。
27.如图1、图3所示,混凝液投加系统由储液箱7、旋转阀5、流量计3、混凝液投加电磁阀2、混凝液投加管1、搅拌电机4、搅拌叶片6等组成。机架的前部安装储液箱7,储液箱7上部安装搅拌电机4,搅拌电机4下方连接搅拌叶片6,并且搅拌叶片6位于储液箱7内部;储液箱7下部连接混凝液投加管1,混凝液投加管1上依次装有旋转阀5、流量计3、混凝液投加电磁阀2,混凝液投加管1 下端左右对称地设有分叉的两根紧贴船体的混凝液出液管111,每根混凝液出液管111上联通几个细管112,细管112从船体30穿出朝向河面。搅拌电机4转动,带动3个间隔120
°
分布搅拌叶片6转动,使得储液箱7内的混凝液搅拌均匀。通过观察流量计3的读数,并手动调节旋转阀5来设置混凝液的流量大小。混凝液投加电磁阀2在电信号控制下控制混凝液是否向河水里投加。多个散开布置的细管112实现向较大氛围的河水中内均匀投加混凝液。
28.如图1、图4所示,鼓风曝气系统由空气压缩机22、输气电磁阀23、输气管 24、电动推杆26、曝气杆27、微型曝气孔18等组成。空气压缩机22安装甲板 29上偏后部的左右居中位置。机架的中部左右两侧分别安装两个电动推杆26,每个电动推杆26的下端都连接一根推转管301,左右两根推转管301的回转轴横穿船体30,每根推转管301的下端都连接一根曝
气杆27,每根曝气杆27上都有几十个微型曝气孔18,每根曝气杆27的末端都装有盖子303,每根曝气杆27都与空气压缩机22通过输气管24相连接,空气压缩机22与输气管24连接处装有输气电磁阀23。电动推杆26在电信号控制下控制推转管301展开或收起,与推转管301固联的曝气杆27也随之展开或收起。在船体30左右侧安装左右侧展开限位开关,限制曝气杆27展开到河水里的深度。空气压缩机22连接的继电器受电信号控制启动或停止其进行空气压缩,输气电磁阀23受电信号控制压缩空气是否输出到输气管24中。输气管24可将压缩空气输出到曝气杆27内,微型曝气孔 18将曝气杆27内的压缩空气以细小气流向外吹出。曝气杆27的末端的盖子303,可以拧开或装回,以排出曝气杆27中的积水。
29.如图1、图5所示,碳纤维生态草投放系统由储草箱13、碳纤维生态草投放驱动电机10、碳纤维生态草投放处联轴器11、碳纤维生态草投放处变速箱12、碳纤维生态草投放控制叶片15等组成。机架的后部安装储草箱13,储草箱底部出口133安装碳纤维生态草投放控制叶片15;储草箱13下部安装碳纤维生态草投放驱动电机10和碳纤维生态草投放处联轴器11,并与碳纤维生态草投放控制叶片15相连接。储草箱13内盛放由水溶胶粘接成圆柱状颗粒的碳纤维生态草,碳纤维生态草在重力作用下可逐渐向储草箱底部出口133移动。5个碳纤维生态草投放控制叶片15间隔72
°
分布,当碳纤维生态草投放控制叶片15不转时,圆柱状颗粒的碳纤维生态草无法从储草箱底部出口133排出;当碳纤维生态草投放控制叶片15转动时,圆柱状颗粒的碳纤维生态草从储草箱底部出口133排出,并经出料槽134滚落到河水中。碳纤维生态草投放驱动电机10转动带动碳纤维生态草投放控制叶片15转动,碳纤维生态草投放驱动电机10转动速度决定了向河水中投放碳纤维生态草的速度。
30.如图1、图6、图7所示,自动控制系统主要由plc、触摸屏、各个继电器、各个电磁阀、各个传感器等组成。plc、各个继电器等安装在电气控制柜8内,触摸屏等安装在电气控制柜8外侧面,各个传感器安装在船体30左右两侧。船体行驶按钮、超声波传感器、船体转向按钮、左右转向限位开关、混凝液搅拌按钮、混凝液投加按钮、空气压缩机按钮、曝气杆展开收起按钮、左右侧展开限位开关、鼓风曝气按钮、碳纤维生态草投放按钮等的信号连接至plc的输入端。plc的输出端连接船体推进电机21、方向舵驱动电机14、搅拌电机4、混凝液投加电磁阀 2、空气压缩机22、左右侧电动推杆26、左右侧输气电磁阀23、碳纤维生态草投放驱动电机10等。通过无线通讯或触摸屏操作等输入控制信号,plc运算后向各个继电器、各个电磁阀等输出信号,从而驱动各个电动机、各个电动推杆26、各个电磁阀等工作。
31.如图7所示,无线通信系统主要由plc、触摸屏、nb-iot无线网关、云平台、手机app等组成,plc、nb-iot无线网关等安装在电气控制柜8内,触摸屏等安装在电气控制柜8外侧面。通过触摸屏操作输入控制信号,是在无人船作业调试时使用;通过手机app进行无线通讯,是在无人船正常作业时使用。
32.如图1所示,供电系统由蓄电池组28和电源逆变器25等组成。蓄电池组28 可提供400w的直流电,或经电源逆变器25逆变成220v的交流电,供无人船上的各用电设备使用。
33.河道黑臭水体原位修复无人船操作方便,其外形尺寸为2200mm
×
970mm
×ꢀ
1100mm、满载重量小于150kg,方便将该无人船运到河面进行黑臭水体修复作业及运回该无人船;无人船作业速度达5km/h,作业范围大,作业宽度1m左右、作业深度1.5m左右、在河面上“s”型地移动作业以覆盖整个河面范围。只需操作手机app即可控制该无人船进行黑臭水体修复作业,作业期间只需定期加入混凝液和碳纤维生态草。河道黑臭水体原位修复无人
船作业安全性高,工人在河岸上远程控制该无人船作业的距离可达3km以上,工人在进行黑臭水体修复作业时受到的健康危害小。河道黑臭水体原位修复无人船作业成本低,应用一只该无人船即可移动式进行大面积河面的黑臭水体修复作业。河道黑臭水体原位修复无人船对黑臭水体修复技术的可调整性好,可以投加不同配方的混凝液、投放不同类型的生物膜载体等。