1.本发明涉及工程机械领域,尤其涉及一种可高效挖掘的挖掘装载机。
背景技术:
2.挖掘装载机作为一款多功能型工程机械,集合了传统的挖掘机及装载机的特点,适用于多种工况。但是在一些相关技术中,挖掘装载机的操作繁琐费时,由装载作业向挖掘作业切换时操作员需要将座椅调整180
°
,面向挖掘装置进行挖掘操作。在挖掘过程中,当需要移动车辆时,需将座椅转回面向装载装置,以进行驾驶,当车辆移动到位后,需要再将座椅转回面向挖掘装置,以进行挖掘作业,挖掘作业效率低;且挖臂的回转角度最多达到180
°
,摆动不灵活,作业范围受限,座椅不随挖臂旋转,操作视野差,操控感差。
技术实现要素:
3.本发明的一些实施例提出一种可高效挖掘的挖掘装载机,用于缓解挖掘作业效率低的问题。
4.在本发明的一个方面,提供一种可高效挖掘的挖掘装载机,包括:
5.车体,包括依次连接设置的第一车体和第二车体;
6.装载装置,设于所述第一车体;
7.操控平台,设于所述第二车体,所述操控平台被配置为相对于所述第二车体可360
°
转动;
8.驾驶室,设于所述操控平台的第一侧;以及
9.挖掘装置,设于所述操控平台的与所述第一侧相对的第二侧,所述挖掘装置被配置为相对于驾驶室可180
°
转动。
10.在一些实施例中,所述驾驶室包括相对设置的第一端和第二端,所述驾驶室的第一端设有观察窗,所述挖掘装置与所述操控平台的连接位置靠近所述驾驶室的第一端。
11.在一些实施例中,所述挖掘装置包括挖掘臂和设于所述挖掘臂的挖斗,所述挖掘臂被配置为收拢以使所述挖斗放置于所述操控平台上,且靠近所述驾驶室的第二端。
12.在一些实施例中,所述挖掘装置被配置为相对于所述驾驶室转动180
°
,以使所述挖斗靠近所述述驾驶室的第一端。
13.在一些实施例中,所述操控平台被配置为在所述挖掘装置进行挖掘工作过程中,相对于所述第二车体转动,以带动所述观察窗与所述挖掘装置同步相对于所述第二车体转动。
14.在一些实施例中,所述驾驶室包括相对设置的第一端和第二端,所述第一端设有观察窗,在所述装载装置位于所述挖掘装载机行驶方向的上游时,所述第一端至所述第二端的方向与所述第一车体至所述第二车体的方向一致。
15.在一些实施例中,所述驾驶室包括相对设置的第一端和第二端,所述第一端设有观察窗,在所述挖掘装置位于所述挖掘装载机行驶方向的上游时,所述第一端至所述第二
端的方向与所述第二车体至所述第一车体的方向一致。
16.在一些实施例中,所述装载装置的中线与所述第一车体的中线重合。
17.在一些实施例中,所述操控平台的中线被配置为可与所述第二车体的中线重合。
18.在一些实施例中,所述驾驶室至所述挖掘装置的方向与所述第二车体的中线延伸方向垂直。
19.在一些实施例中,挖掘装载机还包括发动机,所述发动机设于所述第一车体。
20.在一些实施例中,挖掘装载机还包括设于所述第一车体的第一组车轮和设于所述第二车体的第二组车轮,所述发动机驱动连接于所述第一组车轮,或者,所述发动机驱动连接于所述第一组车轮和所述第二组车轮。
21.在一些实施例中,所述第一车体与所述第二车体铰接,或者,所述第一车体和所述第二车体被构造为连接为一体的整体式结构。
22.在一些实施例中,挖掘装载机还包括第一回转支承,所述操控平台通过所述第一回转支承连接于所述第二车体。
23.在一些实施例中,挖掘装载机还包括第二回转支承,所述挖掘装置通过所述第二回转支承连接于所述操控平台。
24.在一些实施例中,挖掘装载机还包括支腿,所述支腿设于所述第二车体,所述支腿被配置为可相对于所述第二车体展开或伸出以支撑地面,也可相对于所述第二车体收回以悬于地面上方。
25.基于上述技术方案,本发明至少具有以下有益效果:
26.在一些实施例中,操控平台相对于第二车体可360
°
转动,挖掘装置相对于驾驶室可180
°
转动,挖掘装载机可以实现360
°
挖掘以及双向驾驶等功能,在挖掘装置工作时,可直接移动车辆,无需来回转换座椅的位置,提高挖掘效率;且驾驶室内的操作者的视野宽阔,操控感良好,挖掘装载机结构紧凑,车体稳定性好。
附图说明
27.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
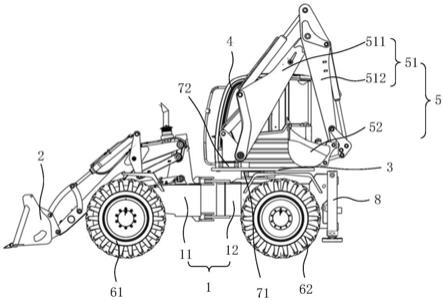
28.图1为根据本发明一些实施例提供的挖掘装载机的第一侧的结构示意图;
29.图2为根据本发明一些实施例提供的挖掘装载机的第二侧的结构示意图;
30.图3为根据本发明一些实施例提供的挖掘装载机的俯视示意图;
31.图4为根据本发明一些实施例提供的挖掘装载机的转弯示意图;
32.图5为根据本发明一些实施例提供的挖掘装载机的装载装置的工作状态示意图;
33.图6为根据本发明一些实施例提供的挖掘装载机行驶过程中,挖掘装置在上游的示意图;
34.图7为根据本发明一些实施例提供的挖掘装载机的挖掘装置的工作状态示意图;
35.图8为根据本发明一些实施例提供的挖掘装载机具有展翼式支腿的结构示意图。
36.附图中标号说明如下:
37.1-车体;11-第一车体;12-第二车体;
38.2-装载装置;
39.3-操控平台;
40.4-驾驶室;41-第一端;42-第二端;43-观察窗;
41.5-挖掘装置;51-挖掘臂;511-第一挖臂;512-第二挖臂;52-挖斗;
42.61-第一组车轮;62-第二组车轮;
43.71-第一回转支承;72-第二回转支承;
44.8-支腿;
45.9-发动机。
46.应当明白,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。此外,相同或类似的参考标号表示相同或类似的构件。
具体实施方式
47.现在将参照附图来详细描述本发明的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。本发明可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本发明透彻且完整,并且向本领域技术人员充分表达本发明的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示例性的,而不是作为限制。
48.本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
49.在本发明中,当描述到特定器件位于第一器件和第二器件之间时,在该特定器件与第一器件或第二器件之间可以存在居间器件,也可以不存在居间器件。当描述到特定器件连接其它器件时,该特定器件可以与所述其它器件直接连接而不具有居间器件,也可以不与所述其它器件直接连接而具有居间器件。
50.本发明使用的所有术语(包括技术术语或者科学术语)与本发明所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用字典中定义的术语应当被解释为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或极度形式化的意义来解释,除非这里明确地这样定义。
51.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
52.如图1和图2所示,一些实施例提供了一种可高效挖掘的挖掘装载机,其包括车体1、装载装置2、操控平台3、驾驶室4和挖掘装置5。
53.车体1包括依次连接设置的第一车体11和第二车体12。
54.装载装置2设于第一车体11。
55.操控平台3设于第二车体12,操控平台3被配置为相对于第二车体12可360
°
转动。
56.如图3所示,驾驶室4设于操控平台3的第一侧。挖掘装置5设于操控平台3的与第一侧相对的第二侧,挖掘装置5被配置为相对于驾驶室4可180
°
转动。
57.操控平台3的第一侧和第二侧为沿挖掘装载机沿直线行驶方向的两侧。挖掘装载机的行驶包括直线行驶和转弯行驶。
58.本公开实施例中,挖掘装载机的车体1包括第一车体11和第二车体12,第一车体11上设有装载装置2,第二车体12上设有操控平台3,操控平台3可相对于第二车体12进行360
°
转动,能够实现挖掘装载机的正向行驶和反向行驶,且可实现360
°
全方位挖掘操作的功能,操作视野大,挖掘回转角度大,摆动灵活,操控感良好。
59.如图1、图2和图5所示,操控平台3位于0
°
位置时,挖掘装载机可进行装载作业或正向行驶。如图6所示,操控平台3位于180
°
位置时挖掘装载机可进行反向行驶。操控平台3的360
°
位置与0
°
位置重合。
60.装载装置2相对于挖掘装置5位于挖掘装载机行驶方向的上游时,为挖掘装载机的正向行驶。挖掘装置5相对于装载装置2位于挖掘装载机行驶方向的上游时,为挖掘装载机的反向行驶。
61.操控平台3的第一侧设置驾驶室4,操控平台3的与第一侧相对的第二侧设置挖掘装置5,整体布局对称,结构紧凑,可以使车身在工作时更加稳定可靠。挖掘装置5可相对于驾驶室4进行180
°
转动。挖掘装置5能够相对于驾驶室4在0
°
到180
°
之间的位置转动,以用于切换挖掘装置5的工作状态和非工作状态。
62.如图7所示,挖掘装置5在0
°
位置时,挖掘装置5可进行挖掘工作,挖掘装置5处于工作状态,挖掘装载机可反向行驶。如图1、图2、图5和图6所示,挖掘装置5在180
°
位置时,挖掘装置5的挖掘臂51可收拢,挖掘装置5的挖斗52放置在操控平台3上,挖掘装置5处于非工作状态,挖掘装载机可正向行驶也可反向行驶。
63.挖掘装置5在进行挖掘工作时,操控平台3可相对于第二车体12在0
°
至360
°
之间转动,以实现挖掘装载机360
°
挖掘工作。
64.综上,本公开实施例提供的挖掘装载机,可以实现360
°
挖掘以及双向驾驶等功能,在挖掘装置5工作时,可直接移动车辆,无需来回转换座椅的位置,提高挖掘效率;且驾驶室4内的操作者的视野宽阔,操控感良好,挖掘装载机结构紧凑,车体稳定性好。
65.在一些实施例中,驾驶室4包括相对设置的第一端41和第二端42,驾驶室4的第一端41设有观察窗43,挖掘装置5与操控平台3的连接位置靠近驾驶室4的第一端41。
66.在装载装置2进行装载作业时,操控平台3位于0
°
位置,驾驶室4的第一端41相对于第二端42靠近装载装置2,驾驶室4内的操作者可通过观察窗43观察装载装置2的作业状态。
67.在挖掘装置5进行挖掘作业时,操控平台3可相对于第二车体12转动,带动挖掘装置5和操控平台3同步转动,驾驶室4内的操作者可通过观察窗43观察挖掘装置5的作业状态,操作者的视野开阔。
68.驾驶室4内设有座椅,座椅设于靠近观察窗43的位置,且面向驾驶室4的第一端41,操作者坐在座椅上,操作挖掘装载装置,通过观察窗43观察外部情况,以及观察装载装置2或挖掘装置5的工作状态。
69.在一些实施例中,如图1和图2所示,挖掘装置5包括挖掘臂51和设于挖掘臂51的挖斗52,挖掘臂51被配置为收拢以使挖斗52放置于操控平台3,且靠近驾驶室4的第二端42。
70.在挖掘装置5处于非工作状态时,挖掘臂51收拢,挖斗52放置于操控平台3,且靠近驾驶室4的第二端42,通过操控平台3支撑挖斗52,避免挖斗52悬吊状态时,引起挖掘臂51晃
动的问题,提高挖掘装载机的稳定性。
71.在一些实施例中,在挖掘臂51收拢,挖斗52放置于操控平台3,且靠近驾驶室4的第二端42时,挖掘装置5被配置为相对于驾驶室4转动180
°
,以使挖斗52靠近驾驶室4的第一端41,以便挖掘臂51在驾驶室4的第一端41展开进行挖掘工作。
72.挖掘装置5可在0
°
至180
°
之间的位置切换,挖掘装置5在0
°
位置时,挖掘装置5可以进行挖掘作业及挖掘装载机可反向行驶,挖掘装置5回转到180
°
位置时,挖掘臂51可收拢,挖斗52放置在操控平台3上,且靠近驾驶室4的第二端42。
73.在一些实施例中,操控平台3被配置为在挖掘装置5进行挖掘工作时相对于第二车体12转动,以带动观察窗43与挖掘装置5同步相对于第二车体12转动。
74.操控平台3带动观察窗43和挖掘装置5同步相对于第二车体12进行360
°
转动,可使挖掘装置5实现360
°
全方位的挖掘作业,操作者在驾驶室4内随着操控平台3旋转,视野开阔,操控感良好。
75.如图2所示,在一些实施例中,驾驶室4包括相对设置的第一端41和第二端42,第一端41设有观察窗43,在装载装置2相对于挖掘装置5位于挖掘装载机行驶方向的上游时,驾驶室4的第一端41相对于第二端42位于挖掘装载机行驶方向的上游。第一端41至第二端42的方向与第一车体11至第二车体12的方向大体一致。
76.如图6所示,在一些实施例中,驾驶室4包括相对设置的第一端41和第二端42,驾驶室4的第一端41设有观察窗43,在挖掘装置5相对于装载装置2位于挖掘装载机行驶方向的上游时,驾驶室4的第一端41相对于第二端42位于挖掘装载机行驶方向的上游。驾驶室4的第一端41至驾驶室4的第二端42的方向与第二车体12至第一车体11的方向大体一致。
77.挖掘装载机行驶时,驾驶室4的第一端41始终相对于第二端42位于行驶方向的上游。
78.在一些实施例中,装载装置2的中线与第一车体11的中线重合。
79.在一些实施例中,车体1的中线沿第一车体11至第二车体12的方向延伸,装载装置2的中线与车体1的中线重合。
80.在一些实施例中,操控平台3被配置为在相对于第二车体12的转动过程中,能够实现操控平台3的中线与第二车体12的中线重合。第二车体12的中线与车体1的中线重合。
81.在一些实施例中,车体1的中线沿第一车体11至第二车体12的方向延伸,操控平台3的中线与车体1的中线重合。
82.第一车体11至第二车体12的方向为:第一车体11和第二车体12位于同一直线时,第一车体11至第二车体12的方向。
83.在挖掘装载机沿直线行驶时,第一车体11和第二车体12位于同一直线,操控平台3的中线与车体1的中线重合,装载装置2的中线也与车体1的中线重合。
84.在操控平台3的中线与车体1的中线重合或者不重合时,挖掘装置5均可以进行挖掘作业。
85.在一些实施例中,驾驶室4至挖掘装置5的方向与第二车体12的中线延伸方向垂直。第二车体12的中线与车体1的中线重合。
86.在一些实施例中,驾驶室4至挖掘装置5的方向与第一车体11至第二车体12的方向垂直。
87.在一些实施例中,如图3所示,挖掘装载机还包括发动机9,发动机9设于第一车体11。
88.发动机9等动力系统设于第一车体11,驾驶室4和挖掘装置5设于第二车体12,可调整挖掘装置5处于最低状态,实现其最高处低于驾驶室4的最高处,降低产品整体高度,增加整车的通过性,便于转场移动。
89.在一些实施例中,挖掘装载机还包括第一组车轮61和第二组车轮62,第一组车轮61设于第一车体11,第二组车轮62设于第二车体12,发动机9驱动连接于第一组车轮61,或者,发动机9驱动连接于第一组车轮61和第二组车轮62。
90.第一车体11上安装有前桥和发动机9,第二车体12上安装有后桥。动力系统包括发动机9和变速箱等。发动机9连接变速箱,动力系统通过驱动前桥和后桥,实现四驱或两驱驱动。
91.在一些实施例中,如图4所示,第一车体11与第二车体12铰接,采用铰接式车架,可以达到最小的转弯半径,实现在狭小场地内的转向,且前桥不再需要设置转向机构,结构更加简单,有效的降低整车成本。
92.在一些实施例中,第一车体11和第二车体12被构造为连接为一体的整体式结构。车体1为整体式,此时需要前后车桥至少有一个为转向桥,从而实现行驶和转向。
93.在一些实施例中,挖掘装载机还包括第一回转支承71,操控平台3通过第一回转支承71连接于第二车体12。
94.第一回转支承71用于支承整个操控平台3,包括驾驶室4与挖掘装置5,第一回转支承71是回转控制机构的主体,可以实现360
°
回转,使挖掘装置5实现360
°
全方位挖掘作业。
95.在一些实施例中,挖掘装载机还包括第二回转支承72,挖掘装置5通过第二回转支承72连接于操控平台3。第二回转支承72具有回转及限位作用,使挖掘装置5在0
°
到180
°
之间位置切换,挖掘装置5在0
°
位置时可以进行挖掘作业及挖掘装载机可反向行驶,挖掘装置5回转到180
°
位置时,挖掘臂51回收,挖斗52放置在操控平台3上,挖掘装载机可正向行驶或反向行驶。第二回转支承72可快速的切换整车的状态,第一回转支承71可用于使挖掘装置5实现多角度的挖掘作业,以满足多工况对工程车辆的要求,提高挖掘效率。
96.在一些实施例中,挖掘装载机还包括支腿8,支腿8设于第二车体12,支腿8被配置为可相对于第二车体12展开或伸出以支撑地面,也可相对于第二车体12收回以悬于地面上方。
97.可选地,支腿8包括h型支腿(如图1至图7所示)和展翼型支腿(如图8所示)等。
98.在一些实施例中,挖掘装载机还包括限位装置,限位装置包括机械限位装置和电控限位装置等,通过设置限位装置在支腿8未完全收回时,车体不可移动。
99.如图1和图2所示,在一些具体实施例中,挖掘装载机包括车体1,车体1采用铰接式结构,车体1包括第一车体11和第二车体12,第一车体11上设有装载装置2,第二车体12通过第一回转支承71支撑操控平台3。
100.挖掘装载机在初始状态时,装载装置2的中线与车体1前后方向的中线重合,发动机9位于装载装置2的中心位置,装载装置2采用八连杆机构,装载装置2的铲斗可实现自动找平。
101.操控平台3的中线与车体前后方向中线重合,操控平台3的底部通过第一回转支承
71与第二车体12连接,操控平台3的顶部沿挖掘装载机行驶方向的一侧设有驾驶室4,操控平台3的顶部沿挖掘装载机行驶方向的另一侧设有第二回转支承72及挖掘装置5。
102.挖掘装置5在0
°
位置时,挖掘装置5可以进行挖掘作业及挖掘装载机可反向行驶,挖掘装置5回转到180
°
位置时,挖掘臂51可收拢,挖斗52放置在操控平台3上,且靠近驾驶室4的第二端42,挖掘装载机可正向行驶或反向行驶。
103.挖掘装置5在初始状态时,挖掘装置5处于180
°
位置。
104.挖掘装置5包括挖掘臂51和挖斗52。其中,挖掘臂51包括第一挖臂511和第二挖臂512,第一挖臂511的第一端与第二回转支承72铰接,第一挖臂511的第二端与第二挖臂512的第一端铰接,第二挖臂512的第二端与挖斗52铰接。挖掘装置5还包括第一油缸、第二油缸和第三油缸,第一油缸设于第二回转支承72且驱动连接于第一挖臂511,第二油缸设于第一挖臂511,且驱动连接于第二挖臂512,第三油缸设于第二挖臂512,且驱动连接于挖斗52。当第一油缸完全收缩,第二油缸和第三油缸完全伸出时,挖掘臂51收拢,挖斗52可放置于操控平台3上或车辆的后端,增加运输的稳定性。
105.第一回转支承71负责支撑整个操控平台3,包括驾驶室4与挖掘装置5,第一回转支承71是回转控制机构的主体,可以实现360
°
回转,实现挖掘装置5的全方位挖掘作业。
106.第二回转支承72具有回转及限位作用,使挖掘装置5能够在0
°
到180
°
之间的位置旋转。通常挖掘装置5在0
°
及180
°
两个位置之间切换,挖掘装置5在0
°
位置时可以进行挖掘作业及挖掘装载机可反向行驶,挖掘装置5回转到180
°
位置,挖掘臂51回收,挖斗52放置在操控平台3上,挖掘装载机可正向行驶或反向行驶。
107.综上,挖掘装载机包括铰接式车体1、装载装置2、操控平台3、挖掘装置5和驾驶室4。操控平台3通过第一回转支承71连接车体1,第一回转支承71可用于实现挖掘装载机的360
°
全方位挖掘及双向驾驶功能,操作简便快捷,作业施工灵活,工作效率高。挖掘装置5采用第二回转支承72连接操控平台3,第二回转支承72具有限位功能,用来切换整车工作状态,既保证正常行驶和装载作业时整机的紧凑灵活,又实现挖掘作业的舒适高效。
108.本公开实施例提供的挖掘装载机能够改善挖掘作业短板,整机结构紧凑、移动灵活,作业高效,驾驶室4内的操作者操作便捷、视野开阔、操控感好,解决了相关挖掘装载机挖掘作业范围窄,挖掘回转角度小,驾驶室4内的操作者视野差,操作困难、作业效率低等问题。
109.基于上述本发明的各实施例,在没有明确否定的情况下,其中一个实施例的技术特征可以有益地与其他一个或多个实施例相互结合。
110.虽然已经通过示例对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改或者对部分技术特征进行等同替换。本发明的范围由所附权利要求来限定。