1.本发明涉及运动控制领域,更具体地说,它涉及一种辅助肢体运动支架的控制方法及装置。
背景技术:
2.随着人工智能技术的发展,计算机对视觉,语音,文本等信息具有足够精确的感知,其在一定程度上课替代人的视觉或听觉感知,因此提出的基于智能算法感知的系统以辅助人的肢体运动成为新的趋势。运动辅助装置可以为残障人士或有行为障碍的老年人提供周围环境信息以及帮助其运动的装置。
3.而当前的运动辅助装置对周围的视觉环境感知弱,并且对用户的原生信息,如文字,语音,手势等信号不具备感知能力,使运动支架的应用受到限制;同时,运动辅助装置在实际环境中的感知与规划能力弱,难以精准的控制运动支架进行运动。
4.因此,如何研究设计一种辅助运动支架的控制方法及装置是我们急需解决的问题。
技术实现要素:
5.本发明的目的是提供一种辅助运动支架的控制方法及装置,实现辅助运动支架可以更加精准的获取周围信息、感知周围环境的能力,使其更具实用性、便利性以及安全性。
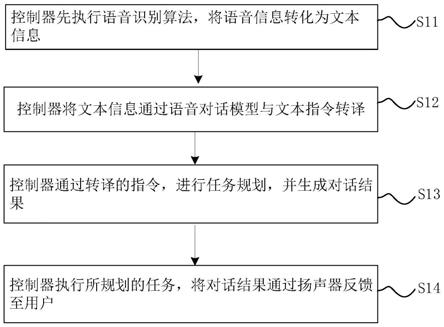
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种辅助肢体运动支架的控制方法,控制器接收传感器所提取的语音信息,并生成路径规划以及对话结果的步骤包括:
7.s11:控制器先执行语音识别算法,将语音信息转化为文本信息;
8.s12:控制器将文本信息通过语音对话模型与文本指令转译;
9.s13:控制器通过转译的指令,进行路径规划,并生成对话结果;
10.s14:控制器执行路径规划,并将对话结果通过扬声器反馈至用户。
11.进一步的,所述路径规划包括远距离路径规划与短距离路径规划。
12.进一步的,导航装置与控制器实现远距离路径规划的步骤包括:
13.s21:导航装置定位当前位置以及目的地的位置信息,将位置信息传递至控制器;
14.s22:控制器根据位置信息结合电子地图,通过执行远程路径规划模型,生成最优行进路径;
15.s23:将生成的最优行进路径通过传感器反馈至用户,控制器依据最优行径路径控制运动支架进行移动。
16.进一步的,传感器与控制器生成短距离路径规划的步骤包括:
17.s31:将摄像头采集的实时图像信息传输至控制器;
18.s32:控制器根据实时图像信息,获取实时环境信息;
19.s33:控制器根据实时环境信息对短程路径进行实时更新,并对存在动态障碍物的
场景控制运动支架调整位姿躲避障碍。
20.进一步的,控制器通过摄像头采集的文本信息以及手势信息进行识别与分析,实现用户执行的翻译与运行,完成对应的任务规划与运动控制。
21.一种辅助肢体运动支架的装置,用于执行所述控制方法,所述装置包括:运动支架,用于辅助用户的行走;控制器,用于实现路径规划、控制运动支架的避障、制动、纠正以及牵引;传感器,用于提取周围环境的实时信息;导航装置,用于提取当前位置信息以及目的地位置信息,并结合电子地图生成最佳行进路径。
22.进一步的,所述运动支架包括运动控制组件、运动控制接口以及可穿戴组件,所述运动控制组件用于控制运动支架的位姿、行走以及制动;所述运动控制接口用于与控制端连接接收支架控制指令;所述可穿戴组件用于使支架完成辅助用户的行走以及位姿。
23.进一步的,所述传感器包括麦克风、扬声器以及摄像头,所述麦克风,用于接收外部的语音信息;所述扬声器,用于接收控制器中的对话语音信息以及控制语音信息,将对应语音信息向用户的传递;所述摄像头,用于采集环境的图像信息。
24.进一步的,所述导航装置包括通迅模块与存储模块,所述通迅模块,用于获取运动支架所处位置的位置信息,所述存储模块,用于存储电子地图以及装置生成的中间数据。
25.与现有技术相比,本发明具有以下有益效果:
26.本发明提供一种辅助肢体运动支架的控制方法及装置,通过传感器、导航装置以及控制器,实现基于多种语言、文本、以及图像智能算法的环境感知,用以完成路径规划以及运动控制任务;并且在路径规划中精确实现短距离路径规划,通过控制器实时运算摄像头所采集的实时图像信息,控制运动支架进行位姿调整,用于规避在短距离内出现的障碍物,实现对运动支架的精确控制,通过提升外界信息的实时处理速率以及对路径规划做出精细的规划,使运动支架更具实用性、便利性和安全性。
附图说明
27.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
28.图1为本发明提供的辅助肢体运动支架的控制方法流程图;
29.图2为本发明提供的辅助肢体运动支架的远距离路径规划流程图;
30.图3为本发明提供的辅助肢体运动支架的短距离路径规划流程图;
31.图4为本发明提供的辅助肢体运动支架的装置结构示意图。
32.附图中标记及对应的零部件名称:1、运动支架;2、传感器;3、控制器;4、导航装置;10、运动控制组件;11、运动控制接口;12、可穿戴组件;20、麦克风;21、扬声器;22、摄像头。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
34.需说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接在另一个部件上或者间接在该另一个部件上。当一个部件被称为是“连接于”另一个部件,它可以
是直接或者间接连接至该另一个部件上。
35.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
36.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
37.实施例1
38.图1为本发明提供的辅助肢体运动支架1的控制方法流程图,
39.本实施例2提出了一种辅助肢体运动支架1的控制方法,控制器3接收传感器2所提取的语音信息,并生成路径规划以及对话结果的步骤包括:
40.s11:控制器3先执行语音识别算法,将语音信息转化为文本信息;
41.s12:控制器3将文本信息通过语音对话模型与文本指令转译;
42.s13:控制器3通过转译的指令,进行路径规划,并生成对话结果;
43.s14:控制器3执行路径规划,并将对话结果通过扬声器21反馈至用户。
44.路径规划包括远距离路径规划与短距离路径规划。将远距离路径规划拆分成若干短距离路径规划,也就是说远距离路径规划可以是由若干短距离路径规划完成的。
45.图2为本发明提供的辅助肢体运动支架1的远距离路径规划流程图,
46.如图2所示,导航装置4与控制器3实现远距离路径规划的步骤包括:
47.s21:导航装置4定位当前位置以及目的地的位置信息,将位置信息传递至控制器3;
48.s22:控制器3根据位置信息结合电子地图,通过执行远程路径规划模型,生成最优行进路径;
49.s23:将生成的最优行进路径通过传感器2反馈至用户,控制器3依据最优行径路径控制运动支架1进行移动。
50.用户语音输入自己想去的目的地,导航装置4提取用户当前位置以及目的地的位置信息,将信息传递至控制器3,控制器3根据存储模块内存储的电子地图,生成最优远距离行进路径,将远距离行进路径通过扬声器21反馈给用户知道,然后控制运动支架1依据最优行进路径移动,比如去某个目的地,会有多条路可走,根据导航装置4选择一个最好的行进路线,比如上坡下坡路段少,行人少,车辆少等。
51.如图3所示为本发明提供的辅助肢体运动支架1的短距离路径规划流程图,传感器2与控制器3生成短距离路径规划的步骤包括:
52.s31:将摄像头22采集的实时图像信息传输至控制器3;
53.s32:控制器3根据实时图像信息,获取实时环境信息;
54.s33:控制器3根据实时环境信息对短程路径进行实时更新,并对存在动态障碍物的场景控制运动支架1调整位姿躲避障碍。
55.根据上述的远距离路径规划可以知道,在远距离行进过程中,极大的可能在路上
会有一些路障或者一些其余情况,那么就需要在短距离路径规划中避开这些路障,如行进方向10米或者15米的路段上是否有障碍物,红绿灯,大量行人等,摄像头22实时拍摄周围环境的图像信息,控制器3依据图像信息,控制器3执行包括但不限于slam、目标检测、光流检测、姿态估计、目标跟踪、场景分割、矫正等算法,提取周围实时环境信息;控制器3处理这些环境信息,生成对应的控制信号,控制运动支架1对当前的障碍物做出位姿躲避障碍物。其中,目标检测算法包括但不限于基于候选区域的目标检测、基于单次目标检测、基于多尺度特征的目标检测算法;光流检测算法包括但不限于lk光流、prlk光流;姿态估计包括但不限于基于深度学习的单人和多人的2d和3d姿态估计方法;目标跟踪包括但不限于基于粒子滤波、基于检测、基于深度学习的方法;矫正算法包括但不限对路径偏移的矫正,对姿态矫正等。
56.控制器3通过摄像头22采集的文本信息以及手势信息进行识别与分析,实现用户执行的翻译与运行,完成对应的任务规划与运动控制。控制器3还可通过摄像头22采集的文字信息以及手势信息完成对应的任务规划与运动控制,如在交通堵塞的情况,可根据交警的手语做出运动控制,也可根据路边告示牌上的文字提示信息进行运动控制,如告示牌上写有前方右转等,控制器3识别文本信息,控制运动支架1进行运动。
57.实施例2
58.本实施例2在实施例1的基础上提出了一种辅助肢体运动支架的装置,用于执行所述控制方法,装置包括:运动支架1,用于辅助用户的行走;控制器3,用于实现路径规划、控制运动支架1的避障、制动、纠正以及牵引;传感器2,用于提取周围环境的实时信息;导航装置4,用于提取当前位置信息以及目的地位置信息,并结合电子地图生成最佳行进路径。
59.运动支架1包括运动控制组件10、运动控制接口11以及可穿戴组件12,运动控制组件10用于控制运动支架1的位姿、行走以及制动;运动控制接口11用于与控制端连接接收支架控制指令;可穿戴组件12用于使支架完成辅助用户的行走以及位姿。
60.控制器3通过运动控制组件10、运动控制接口11控制运动支架1的位姿、行走及制动,可穿戴组件12使用户能够与运动支架1结合起来,在运动支架1运动时能带动用户进行运动。运动支架1可以是:轮椅、托臂式支架等。
61.传感器2包括麦克风20、扬声器21以及摄像头22,麦克风20,用于接收外部的语音信息;扬声器21,用于接收控制器3中的对话语音信息以及控制语音信息,将对应语音信息向用户的传递;摄像头22,用于采集环境的图像信息。
62.导航装置4包括通迅模块与存储模块,通迅模块,用于获取运动支架1所处位置的位置信息,存储模块,用于存储电子地图以及装置生成的中间数据。
63.现有技术中的控制运动支架运动的电器控制装置对用户的原生信息,如文字,语音,手势等信号不具备感知能力,并且对周围环境的实时感知能力以及路径规划能力弱,难以控制运动支架进行精确的运动。
64.本实施例2所提出的一种辅助肢体运动支架的装置,能够快速识别并处理传感器2所提取的语音信息,文本信息,手势,图像信息等信息,并根据这些信息实时的更新路径规划中的短距离路径规划,当用户所讲的目的地是远距离路径规划,通过导航模块进行导航;如距离目的地3km,5km等,那么自然会有大体的行进方向;将远距离路径看成若干个短距离规划,在短距离路径行进中能够对障碍物进行实时避障或者对危险路径能够及时控制运动
支架1制动,那么就可以提高用户的安全度,使得运动支架1的实用性、安全性得到提高。
65.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。