1.本实用新型涉及曝光机领域,尤其涉及一种居中曝光机构。
背景技术:
2.现有的居中曝光机构原理图如图1所示:包括两个边缘感应器a、光罩框b、uvw轴驱动平台c和光罩框上下运动驱动装置d。
3.其中边缘感应器a负责检测材料边缘位置,光罩框b卡住印有图案的玻璃光罩,uvw轴驱动平台c可以驱动光罩框b带动玻璃光罩进行x、y方向的运动,光罩框上下运动驱动装置d负责光罩框b做垂直方向运动。即边缘感应器a检测到材料在边缘位置后,告知uvw轴驱动平台c,然后驱动平台带动光罩进行平面位置移动,让光罩图案处于材料中心位置,然后,光罩框上下运动驱动装置d带着光罩下降到达曝光位置,然后曝光。
4.但现有的居中曝光机构存在以下问题:
5.1、2个边缘感应器a检测精度只能达到100微米左右,无法达到10微米的精度,而随着技术标准的逐渐提高,现有曝光图案的居中精度已无法满足;
6.2、由于光罩框b本身的尺寸,玻璃光罩图案只在光罩的中心位置,所以边缘感应距离实际的图案至少有20cm,这样又会降低边缘感应器检测a的位置的精度;
7.3、边缘感应器只会在对位前检测一次,告知uvw轴驱动平台c进行移动,而实际曝光时,由于吸真空曝光位置材料位置会发生移动,边缘感应器是无法检测的,这样也会降低居中曝光精度。
技术实现要素:
8.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种居中曝光机构,可以不需要安装边缘感应器来检测材料边缘位置,而是靠相机同时抓取图案靶标和材料边缘位置,实现超高精度的居中曝光。
9.为了实现上述目的,本实用新型提供了一种居中曝光机构,包括基座,所述基座上设置有光罩框,设置于光罩框下方的uvw轴驱动平台和光罩框上下运动驱动装置,所述光罩框内夹持有上光罩和下光罩,所述上光罩的上方设置有四个对位相机,所述四个对位相机分别设置于上光罩的四个角处,且所述上光罩和下光罩的四个角处设置有与对位相机配合使用的靶标。
10.进一步的,所述光罩框呈矩形结构。
11.进一步的,所述四个对位相机在同一水平面上。
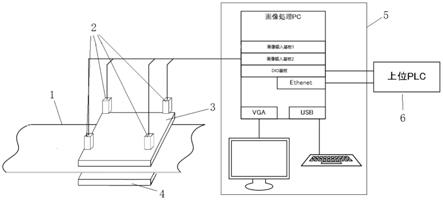
12.进一步的,还包括与对位相机相连的控制单元,所述控制单元包括pc机以及plc。
13.进一步的,所述上光罩和下光罩上开设有真空吸附孔,且所述真空吸附孔内设置有橡皮圈。
14.如上所述,本实用新型所述的一种居中曝光机构,具有以上有益效果:本技术所述的居中曝光机构,可以不需要安装边缘感应器来检测材料边缘位置,而是靠相机同时抓取
图案靶标和材料边缘位置,实现超高精度的居中曝光。
附图说明
15.图1为现有技术中居中曝光机构的结构示意图;
16.图2为本实用新型提出的居中曝光机构的结构示意图;
17.图3为本实用新型提出的居中效果图;
18.图中:1、材料;2、对位相机;3、上光罩;4、下光罩;5、pc机;6、plc;7、靶标;a、边缘感应器;b、光罩框;c、uvw轴驱动平台;d、光罩框上下运动驱动装置。
具体实施方式
19.以上由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
20.请参阅图2-3。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的上,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“上”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容上,当亦视为本实用新型可实施的范畴。
21.实施例:
22.一种居中曝光机构,包括基座,所述基座上设置有光罩框,设置于光罩框下方的uvw轴驱动平台和光罩框上下运动驱动装置,
23.所述光罩框内夹持有上光罩3和下光罩4,所述材料1从上光罩3和下光罩4之间穿过,所述上光罩3的上方设置有四个对位相机2,所述四个对位相机2分别设置于上光罩3的四个角处,且所述上光罩3和下光罩4的四个角处设置有与对位相机2配合使用的靶标7。
24.其中,所述光罩框呈矩形结构,所述上光罩3和下光罩4嵌入于所述光罩框内,上光罩3和下光罩4之间也呈矩形结构。
25.且,所述四个对位相机2在同一水平面上,以保证测量的准确性。
26.在本实施例中,还包括与对位相机2相连的控制单元,所述控制单元包括pc机5以及plc6。
27.同时,所述上光罩3和下光罩4上开设有真空吸附孔,且所述真空吸附孔内设置有橡皮圈,通过真空吸附孔与真空机管路相连接,并通过橡皮圈防止吸真空时的泄漏。
28.本实用新型的原理为:本技术中在上光罩3上方设置有四个对位相机2,通过对位相机2抓取材料1边缘,这4个对位相机2又同时抓取上光罩3和下光罩4上的4个靶标7,
29.对位相机2抓取材料1边缘和抓靶标7后,通过pc机5中的画像识别系统读取出材料1边缘和玻璃光罩靶标7之间的相对位置后,通过算法算出玻璃光罩框应该动作的距离,然后画像识别系统将距离移动指令发送给上位plc6,上位plc6发送指令让uvw轴驱动平台带动光罩框进行水平移动,该动作会进行几次,直到材料1边缘和光罩靶标7的距离进入设定的容许值范围内,这样就保证的抓边的实际精度,避免抓边位置离曝光位置太远,而降低了
抓边的精度。
30.在曝光前,上下光罩4会进行吸真空动作,吸完真空后,对位相机2会再次确认材料1边缘和光罩靶标7的距离,防止了因为真空吸附导致的材料1位置移动和玻璃光罩的位置移动,而出现的真空前定位失效,如果距离不在容许值范围内,会重新破真空进行玻璃光罩和材料1边缘的对位动作,然后再次进行真空确认,这个动作一直持续到真空后,材料1边缘和光罩靶标7也是符合设定的容许值范围。此时,代表光罩是处于材料1中心位置的,也就能达到高精度居中曝光的结果。
31.这样的方法改变了以往的边缘感应器抓边定位法中,因为距图案位置太远,即使真空后重新读取边缘位置,读取的数据也是无效的,不能作为位置判定的基准。而且,按照现在的做法,画像处理系统可以通过真空前和真空后的多次位置数据进行平均化处理,可以算出一个相对稳定的,因为真空吸附导致的偏移补偿值,这样对位时,就会将补偿加入进去,提高真空后材料1边缘和光罩靶标7的对位效率。另外,这种机构设计去除了2个边缘感应器,降低了使用成本,缩小了安装空间,最重要的是实现了高精度的居中曝光。
32.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴上,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想上所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。