基于3d打印技术的便携式共轴数字全息显微镜及成像方法
技术领域
1.本发明涉及数字全息显微技术领域,特别是一种基于3d打印技术的一种便携式共轴数字全息显微镜。
背景技术:
2.随着人们对微观世界探索的深入,显微技术也越来越受到关注,人们不仅实现了对更小尺寸物体的观察,也实现了从记录物体的二维信息到记录三维信息的跨越。数字全息显微技术是一种非接触、无标记、实时的成像技术。数字全息显微镜通过对记录得到的光场信息进行重构,可以得到观察样品的三维信息,并由此可以实现对目标微粒等小尺寸物体的三维形貌观察和三维运动行为追踪。
3.数字全息显微镜按结构可以分为共轴数字全息显微镜和离轴数字全息显微镜。共轴数字全息显微镜结构简单,由光源发出的光线被观察的样品散射成为物光,未被散射的光线则作为参考光,物光与参考光的光轴相同,传播方向一致,形成明暗相间的干涉条纹,通过显微物镜放大后被相机记录得到全息图。最终经由计算机计算重构,获得所观察的目标微粒等的三维信息。
4.目前现有的数字全息显微镜都有需要占有较大的空间、重量较大、不易移动等缺点,无法适应变化环境中的观察需求,特别是某些对观察环境或时间有特殊要求的物体。本发明通过3d打印技术对共轴数字全息显微镜进行了一体化设计与制作,解决现有数字全息显微镜需要占用较大空间、不易移动、成本高、且光路调节复杂的缺点。提供了一种可以随身携带、重量轻便、受空间制约小、设计灵活、且可对目标微粒等微观运动目标进行准确三维成像和追踪的数字全息显微镜,可用于如培养箱内和野外等多变、灵活的应用场景中,对生物医学和材料科学等领域的微观目标物体进行无损、原位、动态的三维监测。此外,该装置成本低廉,使用方便,光源与显微物镜可以自行更换以适应不同尺寸微观物体的观察,适合推广使用。
技术实现要素:
5.本发明的目的在于解决现有数字全息显微镜需要占用较大空间、不易移动、成本高、且光路调节复杂的缺点。提供了一种可以随身携带、重量轻便、受空间制约小、设计灵活、且可对目标微粒等微观运动目标进行准确三维成像和追踪的数字全息显微镜,可用于如培养箱内和野外等多变、灵活的应用场景中,对生物医学和材料科学等领域的微观目标物体进行无损、原位、动态的三维监测。此外,该装置成本低廉,使用方便,光源与显微物镜可以自行更换以适应不同尺寸微观物体的观察,适合推广使用。
6.本发明解决其技术问题所采用的技术方案是:
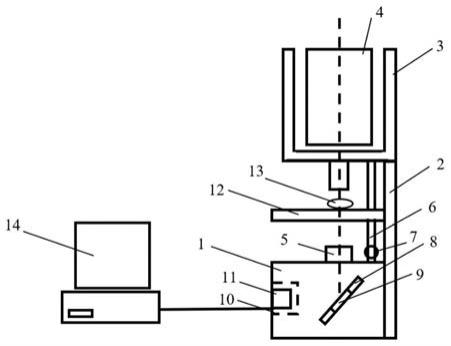
7.一种由3d打印技术的便携式共轴全息显微装置,该装置led光源4、物镜5、反射镜9、旋转蜗杆6、旋转涡轮7、图像传感器11和由3d打印技术制作的一体化结构、载物台12、反射镜装载台8组成,其中,一体化结构包括底座1,支撑板2和光源装载槽3;
8.进一步地,由3d打印技术所制作的一体化结构中的底座1上端固定连接有支撑板2,底座1上端连接有显微物镜5,底座内部留有反射镜装载台8的插槽和相机装载槽10以分别安装装有反射镜9的反射镜装载台8和图像传感器11;支撑板2上端连接有光源装载槽3以安装固定led光源4;底座留有蜗杆孔,连接水平方向的蜗杆6,与之相配合的垂直方向的蜗轮7,垂直方向的蜗轮7与底座1、载物台12和光源装载槽3相连接。通过旋转水平方向的蜗杆6可以带动垂直方向的蜗轮7,从而调节载物台12距离显微物镜5的高度。
9.进一步地,led光源4的波长为250nm《λ《1100nm。
10.进一步地,显微物镜5的放大倍数为1、2、5、10、20、40、50、60或100。
11.进一步地,led光源4中心、光源装载槽3开孔中心、待测样品13、载物台12开孔中心、显微物镜5中心、反射镜装载台8开孔中心、反射镜9中心和图像传感器11的中心在沿光线传播方向依次排列。
12.进一步地,图像传感器11记录全息图,通过计算机14计算重构。
13.采用上述的基于3d打印技术的便携式数字全息显微装置的成像方法,其特征在于,该方法具体步骤如下:
14.a.打开led光源4及图像传感器11的电源;
15.b.调节载物台7的位置,确定待测样品13聚焦位置。随后进行离焦,记录待测样品全息图;
16.c.通过计算机14处理上述全息图,计算并在全息图像中扣除背景图,得到扣除背景图后的全息图像;
17.d.对扣除背景图后的全息图像进行重构,得到重构后的全息图像;
18.e.对微粒三维重构强度分布信息,通过阈值过滤和寻找光强局部最大值,获取各微粒的三维位置。
19.进一步地,所述背景图,由计算多帧全息图像的平均光强获得,计算如下:
[0020][0021]
式中,ib(x,y)为背景图中(x,y)位置处像素的灰度值,n为全息图的总帧数,t为时间,io(x,y)为t时刻原始全息图中(x,y)位置处像素的灰度值,扣除背景后的全息图中各像素点的光强值is(x,y):
[0022]is
(x,y)=io(x,y)-ib(x,y)。
[0023]
进一步地,对扣除背景图后的全息图像进行重构的具体过程为:使用rayleigh-sommerfeld算法重构全息光场,得到设定范围内所有微粒对应的光强信息和相位信息,但由于孪生相的干扰,只对光强信息进行计算而不保存相位信息,计算公式如下:
[0024][0025]
u(r,z)=ft-1
(ft(is(r,0)
·
h(q,-z))),
[0026]
其中,h(r,-z)为传播算子,r为微粒的初始横向坐标,z为微粒的初始轴向坐标;i为虚数单位;k为波数;r为光传播距离;is为微粒的光强;ft-1
为傅里叶逆变换;ft为傅里叶
变换;h(q,-z)为h(r,-z)的傅里叶变换。
[0027]
进一步地,通过光强阈值和寻找局部光强最大,得到微粒三维位置;设定光强阈值下限t,通过光强阈值下限t,过滤低于光强阈值的噪声;在于所观察微粒尺度相近的立方体内,逐点寻找光强最大值的三维位置。
[0028]
本发明与现有技术相比较具有以下优势:本发明设计灵活、体积小、重量轻,可用于如培养箱内和野外等多变、灵活的应用场景中,对生物医学和材料科学等领域的微观目标物体进行无损、原位、动态的三维监测。此外,该装置成本低廉,使用方便,光源与显微物镜可以自行更换以适应不同微观目标物体的观察,适合推广使用。
附图说明
[0029]
图1为本发明所述基于3d打印技术的便携式共轴数字全息显微镜示意图;
[0030]
图2为本发明所述实例1中图像传感器记录得到的硅藻全息图;
[0031]
图3为本发明所述实例1中扣除背景后的全息图;
[0032]
图4为本发明所述实例1中扣除背景后的全息图的局部放大图;
[0033]
图5为本发明所述扣除背景的原理示意图;
[0034]
图6为本发明所述扣除背景后重构计算得到光强图的原理示意图;
[0035]
图7为本发明所述实例1中全息图计算重构后的复原图;
[0036]
图8为本发明所述实例1中全息图计算重构后的复原图的局部放大图;
[0037]
图9为本发明所述实例2中图像传感器记录得到的大肠杆菌全息图;
[0038]
图10为本发明所述实例2中扣除背景后的全息图;
[0039]
图11为本发明所述实例2中扣除背景后的全息图的局部放大图;
[0040]
图12为本发明所述实例2中全息图计算重构后的复原图;
[0041]
图13为本发明所述实例2中全息图计算重构后的复原图的局部放大图;
[0042]
图14为本发明所述实例3中图像传感器记录得到的二氧化硅小球全息图;
[0043]
图15为本发明所述实例3中扣除背景后的全息图;
[0044]
图16为本发明所述实例3中全息图计算重构后的复原图;
[0045]
图17为本发明所述实例3中全息图计算重构后的复原图的局部放大图;
[0046]
图18为本发明所述实例4中图像传感器记录得到的红细胞全息图;
[0047]
图19为本发明所述实例4中扣除背景后的全息图;
[0048]
图20为本发明所述实例4中扣除背景后的全息图的局部放大图;
[0049]
图21为本发明所述实例4中全息图计算重构后的复原图;
[0050]
图22为本发明所述实例4中全息图计算重构后的复原图的局部放大图。
[0051]
图中各个部件如下:
[0052]
底座1,支撑板2,光源装载槽3,光源4,显微物镜5,旋转蜗杆6,旋转蜗轮7,反射镜装载台8,反射镜9,图像传感器装载槽10,图像传感器11,载物台12,待测样品13,电脑14。
[0053]
具体实施方法
[0054]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的应用范围不限于此。
[0055]
实施例1
[0056]
如图一所示,基于3d打印技术的便携式共轴数字全息显微镜采用可调节光强的led光源4,将其放置并固定于光源装载槽3中,其中led光源4中心与光源装载槽3的中心重合。先将水平方向的旋转蜗杆6于底座相连,再将两个垂直方向的旋转蜗杆6依次分别穿过通过光源装载槽3,载物台12和底座2,最后与水平方向的蜗杆6连接。通过旋转水平方向的旋转蜗杆6以带动两个垂直方向旋转蜗轮7的转动来调节载物台12的高度以控制放置于载物台12上的待测样品13距离显微物镜5的距离。其中,所述可调节led光源4的波长为528nm,显微物镜5的方法倍数为10;
[0057]
led光源4发出的光线通过光源装载槽3的中心孔洞后光源光的传播方向为垂直方向,垂直传播的光线穿过放置有待测样品13的载物台4的开孔中心到达显微物镜5,一部分光线经待测样品13散射成为物光,另一部分未经散射的光线作为参考光,两束光线叠加产生干涉条纹。经过显微物镜5放大,光线达到装配在反射镜装载台8中心的反射镜9,反射光被固定于图像传感器装载槽10中的图像传感器11接收,记录成为如图二所示的全息图;通过计算机14在全息图像中扣除背景图,得到如图三的扣除背景图后的全息图像,其局部放大图如图四所示;
[0058]
这里的待测样品13选择为硅藻藻液;
[0059]
所述背景图,由计算多帧全息图像的平均光强获得,计算如下:
[0060][0061]
式中,ib(x,y)为背景图中(x,y)位置处像素的灰度值,n为全息图的总帧数,t为时间,io(x,y)为t时刻原始全息图中(x,y)位置处像素的灰度值,扣除背景后的全息图中各像素点的光强值is(x,y):
[0062]is
(x,y)=io(x,y)-ib(x,y)。
[0063]
本实施例中,采用平均法获得背景光强,即计算若干张连续拍摄的全息图的平均值,并将其从每张全息图中扣减,来消除背景信号带来的干扰,其示意图如图五所示。
[0064]
对扣除背景图后的全息图像进行重构,得到重构后的全息图像;具体过程为:使用rayleigh-sommerfeld算法重构全息光场,得到设定范围内所有微粒对应的光强信息和相位信息,但由于孪生相的干扰,只对光强信息进行计算而不保存相位信息,计算公式如下:
[0065][0066]
u(r,z)=ft-1
(ft(is(r,0)
·
h(q,-z))),
[0067]
其中,h(r,-z)为传播算子,r为微粒的初始横向坐标,z为微粒的初始轴向坐标;i为虚数单位;k为波数;r为光传播距离;is为微粒的光强;ft-1
为傅里叶逆变换;ft为傅里叶变换;h(q,-z)为h(r,-z)的傅里叶变换。
[0068]
通过光强阈值和寻找局部光强最大,得到微粒三维位置;具体过程为:设定光强阈值下限t,通过光强阈值下限t,过滤低于光强阈值的噪声;在于所观察微粒尺度相近的立方体内,逐点寻找光强最大值的三维位置,即为目标微粒的三维焦面位置。光强值最大处的重构图,即为全息图像中对应微粒在焦面处的光强图。该过程示意图如图六所示,图七为重构得到的待测样品13焦面的光强图,其局部放大图如图八所示。
[0069]
实施例2
[0070]
如图一所示,基于3d打印技术的便携式共轴数字全息显微镜采用可调节光强的led光源4,将其放置并固定于光源装载槽3中,其中led光源4中心与光源装载槽3的中心重合。先将水平方向的旋转蜗杆6于底座相连,再将两个垂直方向的旋转蜗杆6依次分别穿过通过光源装载槽3,载物台12和底座2,最后与水平方向的蜗杆6连接。通过旋转水平方向的旋转蜗杆6以带动两个垂直方向旋转蜗轮7的转动来调节载物台12的高度以控制放置于载物台12上的待测样品13距离显微物镜5的距离。其中,所述可调节led光源4的波长为528nm,显微物镜5的方法倍数为10;
[0071]
led光源4发出的光线通过光源装载槽3的中心孔洞后光源光的传播方向为垂直方向,垂直传播的光线穿过放置有待测样品13的载物台4的开孔中心到达显微物镜5,一部分光线经待测样品13散射成为物光,另一部分未经散射的光线作为参考光,两束光线叠加产生干涉条纹。经过显微物镜5放大,光线达到装配在反射镜装载台8中心的反射镜9,反射光被固定于图像传感器装载槽10中的图像传感器11接收,记录成为如图九所示的全息图;通过计算机14在全息图像中扣除背景图,得到如图十的扣除背景图后的全息图像,其局部放大图如图十一所示;
[0072]
这里的待测样品13选择为大肠杆菌菌液;
[0073]
所述背景图,由计算多帧全息图像的平均光强获得,计算如下:
[0074][0075]
式中,ib(x,y)为背景图中(x,y)位置处像素的灰度值,n为全息图的总帧数,t为时间,io(x,y)为t时刻原始全息图中(x,y)位置处像素的灰度值,扣除背景后的全息图中各像素点的光强值is(x,y):
[0076]is
(x,y)=io(x,y)-ib(x,y)。
[0077]
本实施例中,采用平均法获得背景光强,即计算若干张连续拍摄的全息图的平均值,并将其从每张全息图中扣减,来消除背景信号带来的干扰,其示意图如图五所示。
[0078]
对扣除背景图后的全息图像进行重构,得到重构后的全息图像;具体过程为:使用rayleigh-sommerfeld算法重构全息光场,得到设定范围内所有微粒对应的光强信息和相位信息,但由于孪生相的干扰,只对光强信息进行计算而不保存相位信息,计算公式如下:
[0079][0080]
u(r,z)=ft-1
(ft(is(r,0)
·
h(q,-z))),
[0081]
其中,h(r,-z)为传播算子,r为微粒的初始横向坐标,z为微粒的初始轴向坐标;i为虚数单位;k为波数;r为光传播距离;is为微粒的光强;ft-1
为傅里叶逆变换;ft为傅里叶变换;h(q,-z)为h(r,-z)的傅里叶变换。
[0082]
通过光强阈值和寻找局部光强最大,得到微粒三维位置;具体过程为:设定光强阈值下限t,通过光强阈值下限t,过滤低于光强阈值的噪声;在于所观察微粒尺度相近的立方体内,逐点寻找光强最大值的三维位置,即为目标微粒的三维焦面位置。光强值最大处的重构图,即为全息图像中对应微粒在焦面处的光强图。该过程示意图如图六所示,图十二为重
构得到的待测样品13焦面的光强图,其局部放大图如图十三所示。
[0083]
实施例3
[0084]
如图一所示,基于3d打印技术的便携式共轴数字全息显微镜采用可调节光强的led光源4,将其放置并固定于光源装载槽3中,其中led光源4中心与光源装载槽3的中心重合。先将水平方向的旋转蜗杆6于底座相连,再将两个垂直方向的旋转蜗杆6依次分别穿过通过光源装载槽3,载物台12和底座2,最后与水平方向的蜗杆6连接。通过旋转水平方向的旋转蜗杆6以带动两个垂直方向旋转蜗轮7的转动来调节载物台12的高度以控制放置于载物台12上的待测样品13距离显微物镜5的距离。其中,所述可调节led光源4的波长为528nm,显微物镜5的方法倍数为40;
[0085]
led光源4发出的光线通过光源装载槽3的中心孔洞后光源光的传播方向为垂直方向,垂直传播的光线穿过放置有待测样品13的载物台4的开孔中心到达显微物镜5,一部分光线经待测样品13散射成为物光,另一部分未经散射的光线作为参考光,两束光线叠加产生干涉条纹。经过显微物镜5放大,光线达到装配在反射镜装载台8中心的反射镜9,反射光被固定于图像传感器装载槽10中的图像传感器11接收,记录成为如图十四所示的全息图;通过计算机14在全息图像中扣除背景图,得到如图十五的扣除背景图后的全息图像,其局部放大图如图十六所示;
[0086]
这里的待测样品13选择为直径12μm的二氧化硅小球;
[0087]
所述背景图,由计算多帧全息图像的平均光强获得,计算如下:
[0088][0089]
式中,ib(x,y)为背景图中(x,y)位置处像素的灰度值,n为全息图的总帧数,t为时间,io(x,y)为t时刻原始全息图中(x,y)位置处像素的灰度值,扣除背景后的全息图中各像素点的光强值is(x,y):
[0090]is
(x,y)=io(x,y)-ib(x,y)。
[0091]
本实施例中,采用平均法获得背景光强,即计算若干张连续拍摄的全息图的平均值,并将其从每张全息图中扣减,来消除背景信号带来的干扰,其示意图如图五所示。
[0092]
对扣除背景图后的全息图像进行重构,得到重构后的全息图像;具体过程为:使用rayleigh-sommerfeld算法重构全息光场,得到设定范围内所有微粒对应的光强信息和相位信息,但由于孪生相的干扰,只对光强信息进行计算而不保存相位信息,计算公式如下:
[0093][0094]
u(r,z)=ft-1
(ft(is(r,0)
·
h(q,-z))),
[0095]
其中,h(r,-z)为传播算子,r为微粒的初始横向坐标,z为微粒的初始轴向坐标;i为虚数单位;k为波数;r为光传播距离;is为微粒的光强;ft-1
为傅里叶逆变换;ft为傅里叶变换;h(q,-z)为h(r,-z0的傅里叶变换。
[0096]
通过光强阈值和寻找局部光强最大,得到微粒三维位置;具体过程为:设定光强阈值下限t,通过光强阈值下限t,过滤低于光强阈值的噪声;在于所观察微粒尺度相近的立方体内,逐点寻找光强最大值的三维位置,即为目标微粒的三维焦面位置。光强值最大处的重
构图,即为全息图像中对应微粒在焦面处的光强图。该过程示意图如图六所示,图十七为重构得到的待测样品13焦面的光强图,其局部放大图如图十八所示。
[0097]
实施例4
[0098]
如图一所示,基于3d打印技术的便携式共轴数字全息显微镜采用可调节光强的led光源4,将其放置并固定于光源装载槽3中,其中led光源4中心与光源装载槽3的中心重合。先将水平方向的旋转蜗杆6于底座相连,再将两个垂直方向的旋转蜗杆6依次分别穿过通过光源装载槽3,载物台12和底座2,最后与水平方向的蜗杆6连接。通过旋转水平方向的旋转蜗杆6以带动两个垂直方向旋转蜗轮7的转动来调节载物台12的高度以控制放置于载物台12上的待测样品13距离显微物镜5的距离。其中,所述可调节led光源4的波长为528nm,显微物镜5的方法倍数为40;
[0099]
led光源4发出的光线通过光源装载槽3的中心孔洞后光源光的传播方向为垂直方向,垂直传播的光线穿过放置有待测样品13的载物台4的开孔中心到达显微物镜5,一部分光线经待测样品13散射成为物光,另一部分未经散射的光线作为参考光,两束光线叠加产生干涉条纹。经过显微物镜5放大,光线达到装配在反射镜装载台8中心的反射镜9,反射光被固定于图像传感器装载槽10中的图像传感器11接收,记录成为如图十九所示的全息图;通过计算机14在全息图像中扣除背景图,得到如图二十的扣除背景图后的全息图像;
[0100]
这里的待测样品13选择为红细胞;
[0101]
所述背景图,由计算多帧全息图像的平均光强获得,计算如下:
[0102][0103]
式中,ib(x,y)为背景图中(x,y)位置处像素的灰度值,n为全息图的总帧数,t为时间,io(x,y)为t时刻原始全息图中(x,y)位置处像素的灰度值,扣除背景后的全息图中各像素点的光强值is(x,y):
[0104]is
(x,y)=io(x,y)-ib(x,y)。
[0105]
本实施例中,采用平均法获得背景光强,即计算若干张连续拍摄的全息图的平均值,并将其从每张全息图中扣减,来消除背景信号带来的干扰,其示意图如图五所示。
[0106]
对扣除背景图后的全息图像进行重构,得到重构后的全息图像;具体过程为:使用rayleigh-sommerfeld算法重构全息光场,得到设定范围内所有微粒对应的光强信息和相位信息,但由于孪生相的干扰,只对光强信息进行计算而不保存相位信息,计算公式如下:
[0107][0108]
u(r,z)=ft-1
(ft(is(r,0)
·
h(q,-z))),
[0109]
其中,h(r,-z)为传播算子,r为微粒的初始横向坐标,z为微粒的初始轴向坐标;i为虚数单位;k为波数;r为光传播距离;is为微粒的光强;ft-1
为傅里叶逆变换;ft为傅里叶变换;h(q,-z)为h(r,-z)的傅里叶变换。
[0110]
通过光强阈值和寻找局部光强最大,得到微粒三维位置;具体过程为:设定光强阈值下限t,通过光强阈值下限t,过滤低于光强阈值的噪声;在于所观察微粒尺度相近的立方体内,逐点寻找光强最大值的三维位置,即为目标微粒的三维焦面位置。光强值最大处的重
构图,即为全息图像中对应微粒在焦面处的光强图。该过程示意图如图六所示,图二十一为重构得到的待测样品13焦面的光强图,其局部放大图如图二十二所示。