1.本技术涉及眼镜的领域,尤其是涉及一种可自动调节度数的智能眼镜。
背景技术:
2.随着近视人群的增多、以及人口老龄化,近视眼、远视眼或老花眼的人越来越多,而眼镜是最普遍的矫正视力的工具,所以对眼镜的需求也越来越大。
3.市面上的眼镜种类、款式数不胜数,多的让人眼花缭乱。但居多的仍是传统的眼镜,需要去眼镜店或者医院测定眼睛的度数,过程耗时费力,而且传统眼镜的度数固定,而使用者的眼睛近视或远视的度数会变化,导致隔段时间需要更换度数适配的眼镜,不仅耗时耗力,还十分耗钱。
4.针对上述中的相关技术,发明人认为存在传统眼镜的度数无法调节的缺陷。
技术实现要素:
5.为了尽量克服现有技术存在度数调节不够方便、不够精细的问题,本技术提供一种可自动调节度数的智能眼镜。
6.本技术提供的一种可自动调节度数的智能眼镜采用如下的技术方案:一种可自动调节度数的智能眼镜,包括镜框组件、鼻托和镜片,所述镜片包括前镜片和后镜片,所述前镜片和后镜片均为渐变多焦点镜片;所述镜框组件包括眼镜支架,所述眼镜支架上设置有安装框,所述安装框上安装有调节组件,所述调节组件包括驱动件,所述驱动件能够驱动所述后镜片靠近或远离所述鼻托运动。
7.通过采用上述技术方案,利用光的折射原理,将前镜片和后镜片设计为渐变多焦点镜片,所以前镜片和后镜片均具有多个焦点,因为前镜片和后镜片上不同的位置的焦点不同,故物体的反射光线在经镜片的折射成像到视网膜的位置也不同,故通过前镜片和后镜片的配合,可以清楚的看到近处、远处以及中距离的物体。而调节组件可以调节后镜片的移动,改变前后镜片之间的相对位置,从而达到改变前镜片和后镜片的焦点,进而改变镜片的焦距,因为眼镜的度数与镜片焦距的关系为,度数=1/f
×
100,f为焦距;也就是焦距的倒数乘以100等于度数,所以改变焦距即可实现眼镜度数的调节。通过前镜片和后镜片的配合能够看近处或远处的物体,这样来回切换能够锻炼睫状肌。
8.可选的,所述调节组件还包括传动件、移动件以及导向件,所述驱动件与所述传动件的一端连接,所述传动件穿过所述移动件,所述传动件的另一端与安装框的侧壁连接;所述移动件的下端连接所述后镜片;所述导向件穿过所述移动件,所述导向件的两端与所述安装框的侧壁固定连接,所述移动件能够在所述导向件上水平移动。
9.通过采用上述技术方案,驱动件驱动传动件进行转动,传动件转动会带动移动件转动和移动,但是实际上只需要移动件和后镜片靠近或远离鼻托的方向水平运动,所以设
置了导向件,导向件穿过移动件,且与安装框固定连接,所以导向件限制了移动件和后镜片的转动,只能沿着导向件进行水平移动。
10.可选的,所述移动件设置有凸块,所述安装框水平开设有滑槽,所述凸块能够在所述滑槽内滑动。
11.通过采用上述技术方案,凸块和滑槽的配合,进一步限制了移动件的转动,使得移动件只能沿着滑槽的方向进行水平移动,另外也缓解了由驱动件带来的震动,使得度数的调节更加精准。
12.可选的,所述驱动件为微型步进电机,所述传动件为丝杆。
13.通过采用上述技术方案,微型步进电机体积小,质量轻,微型步进电机的输出轴与丝杆连接,能够驱动丝杆转动,可以实现后镜片进行微小的运动,实现度数的精细调节。
14.可选的,所述移动件包括连接部,所述连接部开设有第一凹槽;所述后镜片设置有连接块,所述连接块开设有第二凹槽,所述第一凹槽和所述第二凹槽内均固设有磁极相互吸引的磁铁。
15.通过采用上述技术方案,后镜片与移动件通过磁吸方式进行连接,连接方式比较简单,安装拆卸十分方便,也便于对后镜片的更换。
16.可选的,所述连接部还开设有一个及以上的第三凹槽,所述连接块上设置有一个及以上的凸柱,所述凸柱与所述第三凹槽进行插接配合。
17.通过采用上述技术方案,使得后镜片与移动件之间连接更加紧密,尽量避免在调节后镜片移动时发生脱落的情况发生。
18.可选的,所述眼镜支架上设置有控制模块和无线通讯模块,所述无线通讯模块与所述控制模块电连接,所述控制模块与所述驱动件电连接,所述无线通讯模块能够与智能终端进行信号传输。
19.通过上述技术方案,通过智能终端例如智能手机,向无线通讯模块例如蓝牙,传输信号,从而向控制模块传递信号,控制驱动件对后镜片进行调节,实现自动调节,简单方便。
20.可选的,所述眼镜支架设有一个及以上的卡块,所述眼镜支架中部设置有鼻托框;所述卡块与所述眼镜支架、所述鼻托框侧壁形成有第一卡槽,所述前镜片上设置有卡接部,所述卡接部与所述第一卡槽配合进行卡接。
21.通过采用上述技术方案,前镜片通过卡接部与缺口配合进行卡接,这种连接方式便于前镜片的安装和拆卸;也方便对前镜片进行更换,另外前镜片可以选择太阳镜片,也可以选择防蓝光镜片,可根据实际需求进行自由更换。
22.可选的,所述眼镜支架还设有一个及以上的第二固定块,所述第二固定块设有盲孔;所述镜框组件还包括连接板,所述连接部上设置有与所述第二固定块数量相等的连接柱;所述连接柱与所述第二固定块上的盲孔插接配合。
23.通过采用上述技术方案,眼镜支架与连接板通过连接柱和盲孔插接,一方面连接板将眼镜支架上设置的调节组件以及无线通信模块等进行遮挡,起到一定的保护作用,尽量减少调节组件受外界干扰。
24.可选的,所述连接板上对称设置有底板,所述底板两端设有凸起,所述凸起之间形成缺口;所述凸起能够与所述第一卡槽进行卡接配合。
25.通过采用上述技术方案,进一步提高了连接板和眼镜支架的连接紧密性,而缺口
的存在,一方面节省了材料,一方面给后镜片的移动提供充足的空间。
26.综上所述,本技术包括以下至少一种有益技术效果:利用光学原理,选用渐进多焦点镜片,而且采用前镜片和后镜片配合的方式,通过设置调节组件调节后镜片的远离或靠近鼻托水平移动,达到调整前镜片和后镜片的焦点,从而使焦距发生变化,最终达到眼镜度数的变化;通过设置无线通讯模块和控制模块,与智能终端进行信号传输,实现在智能终端对眼镜度数的自动调节,调节方式简单易操作,而且相较于手动调节更为精准;整个眼镜结构紧凑,空间利用率高,即减少了材料的浪费,也实现了眼镜的轻质化,从而减少了在佩戴时给佩戴者的压迫感,提升了佩戴体验。
附图说明
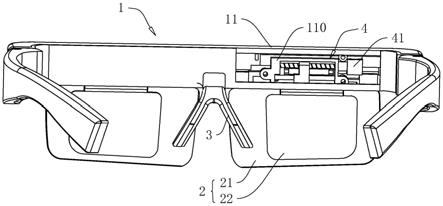
27.图1是本技术实施例的整体结构示意图。
28.图2是本技术实施例的眼镜支架与前镜片的结构示意图。
29.图3是本技术实施例的局部结构示意图。
30.图4 是本技术实施例的调节组件结构示意图。
31.图5是本技术实施例的调节组件的剖视图。
32.图6是本技术实施例的移动滑块与后镜片的结构示意图。
33.图7是本技术实施例的安装框与控制模块的结构示意图。
34.图8是本技术实施例的连接板结构示意图。
35.图9是本技术实施例的局部结构示意图。
36.附图标记说明:1、镜框组件;11、眼镜支架;110、安装框;1101、滑槽;1102、限位孔;111、卡块;1110、下端部;1111、上端部;112、鼻托框;113、第一固定块;114、第二固定块;12、连接板;121、底板;1211、凸起;1212、缺口;122、连接柱;123、卡接板;2、镜片;21、前镜片;211、卡接部;22、后镜片;221、连接块;2211、第二凹槽;2212、凸柱;3、鼻托;4、调节组件;41、驱动件;42、传动件;43、移动件;431、连接部;4311、第一凹槽;4312、第三凹槽;432、凸块;44、导向件;5、镜腿;100、第一卡槽;200、第二卡槽;300、控制模块;301、限位块。
具体实施方式
37.以下结合附图1-9对本技术作进一步详细说明。为了清楚的展示本技术的一种可自动调节度数的智能眼镜内部结构,图1进行了部分切割,图6进行了部分剖视处理。
38.本技术实施例公开一种可自动调节度数的智能眼镜。参照图1,一种可自动调节度数的智能眼镜包括镜框组件1、鼻托3和镜片2。镜片2包括前镜片21和后镜片22,前镜片21和后镜片22均为渐进多焦点镜片。镜框组件1包括眼镜支架11,眼镜支架11上设置有安装框110,安装框110上设置有调节组件4,调节组件4包括驱动件41,驱动件41能够驱动后镜片22远离或靠近鼻托3水平移动。
39.这样设置的原理是利用光的折射,通过调节前镜片21和后镜片22的相对位置关系来实现度数的调节,所以通过让驱动件41驱动后镜片22水平移动,即可让后镜片22的焦点发生变化,焦距则随之变化,最终实现度数的变化,最终的效果就是通过前镜片21和后镜片22能够清楚的看到近处、远处的物体。值得一提的是,通过控制驱动件41驱动后镜片22来回
的移动,也可达到锻炼睫状肌的效果。
40.参照图2,具体的,眼镜支架11的中部设置有鼻托框112,眼镜支架11对称与鼻托框112设置有4个卡块111,卡块111与眼镜支架11的侧壁、鼻托框112的侧壁形成4个第一卡槽100,前镜片21的上端面的两端设置有2个卡接部211,卡接部211具体是t形块,t形块能够与第一卡槽100配合,实现前镜片21与眼镜支架11的可拆卸连接。这样设置的好处在于,方便安装和拆卸。
41.参照图3,值得注意的是,本技术实施例中卡块111为z形块,z形块的下端部1110与眼镜支架11的侧壁,形成第一卡槽100,z形块的上端部1111形成承载端面,给驱动件41的安装提供稳定支撑,保证驱动件41的正常运行。
42.参照图3,眼镜支架11设置有安装框110,具体来说,眼镜支架11上设置了4个第一固定块113,第一固定块113上均开设有盲孔,安装框110的两端开设有与盲孔适配的通孔,使用螺栓(未示出)将安装框110进行固定在眼镜支架11的第一固定块113上。这种安装方式牢固,且安装拆卸方便。
43.参照图4,安装框110的三个侧壁形成有安装强势,安装强势给调节组件4提供了安装空间,调节组件4具体包括驱动件41、传动件42、移动件43和导向件44。
44.在本实施例中,驱动件41是微型步进电机、传动件42是丝杆、导向件44是导杆、移动件43是移动滑块。驱动件41设置在安装框110外的一侧,驱动件41具体是微型步进电机,微型步进电机的输出轴穿过安装框110的侧壁与丝杆的一端连接,丝杆穿过移动滑块的上端,丝杆的另一端与安装框110的另一侧壁转动连接。即微型步进电机能够驱动丝杆进行转动,丝杆的转动能够带动移动滑块转动。在实际情况中,只需要移动滑块的水平移动,所以设置了导杆对移动滑块的移动进行限制。具体而言,导杆平行与丝杆设置在安装框110内,导杆穿过移动滑块。
45.参照图4和图5,为了进一步限定移动滑块能够平稳在微型步进电机的驱动下,随着丝杆的转动而发生水平移动。在安装框110还开设有滑槽1101,在移动滑块上设置有凸块432,凸块432与移动滑块一体成型,凸块432在能够滑槽1101中来回滑动。
46.通过设置导杆、凸块432和滑槽1101的配合,来实现移动滑块的水平移动,这样能够最大程度的减少移动滑块发生转动。另一方面,滑槽1101的存在一定程度上减少了材料的使用,进而提升了眼镜的轻质化。
47.参照图6,进一步的,移动滑块包括连接部431,连接部431与前镜片21通过磁吸作用连接。连接部431上设置有磁铁(图中未示出),更具体的,连接部431的端面开设有第一凹槽4311,第一凹槽4311内安装有磁铁。在后镜片22的顶端面设置有连接块221,在连接块221上开设有第二凹槽2211,第二凹槽2211内也安装有磁铁,后镜片22与移动滑块上的磁铁磁极相互吸引,从而实现后镜片22与连接部431的磁吸连接。
48.进一步的,为了加固移动滑块与后镜片22的连接程度,在连接块221上设置了两个凸柱2212,与此同时,在连接部431开设有两个第三凹槽4312,凸柱2212与第三凹槽4312插接配合。这样设置的好处在于,一方面能够提高后镜片22与移动滑块的连接紧密度,尽量避免在移动过程中后镜片22的掉落,另一方面起到定位的作用,使得在安装后镜片22时更加方便快捷,将凸柱2212对准第三凹槽4312对准即安装完成。。
49.本实施例不对凸柱2212、凹槽的数量进行限制,只要能够达到稳定连接的效果即
可。
50.为了实现调节度数的自动化和智能化,在眼镜支架11上设置了无线通讯模块和控制模块。控制模块与驱动件41电连接,无线通讯模块与控制模块电连接。在本实施例中,无线通讯模块为蓝牙模块,即本技术的一种可自动调节度数的智能眼镜可以通过蓝牙与智能终端(例如手机、电脑)连接,并进行控制信号或数据的传输。这样即可实现通过手机安装app来控制调节组件4,调节眼镜的度数,实现调节自动化、智能化,相较于手动调节更加精细。
51.另外为实现自动调节,相应的在眼镜支架11内还设有电源件例如电池,以及数据存储单元等,本技术仅对结构进行说明,相应的电学元件不做过多的阐释。
52.进一步的,参照图4和图7,为了使控制模块300与驱动件41的电连接更加稳定。在控制模块300上设置了两个限位块301,所述限位块301为u型块。与之对应的,在安装框110的滑槽1101两端的槽壁开设有两个限位孔1102,限位块301与限位孔1102卡接配合,能够对控制模块300进行固定连接。
53.值得注意的是,限位孔1102设置为u形块,是为了与限位孔1102卡接配合后,与滑槽1101平滑过渡,这样的好处在于延长了滑槽1101的长度,使移动滑块的移动范围扩大,进而实现眼镜度数的调节范围扩大。
54.为了方便无线通讯模块的安装,鼻托框112与眼镜支架11之间形成容置槽,容置槽能够容纳无线通讯模块以及导线等。这样设置的好处在于,提高了空间利用率,也进一步提升了眼镜的轻质化。
55.参照图8和图9,镜框组件1还包括连接板12,眼镜支架11与连接板12连接,对安装在眼镜支架11上的调节组件4、无线通信模块等进行封闭保护。具体而言,眼镜支架11上还设置有4个第二固定块114,在第二固定块114上开设有盲孔,在连接板12对应第二固定块114的位置设有4个连接柱122,连接柱122能够与第二固定块114上的盲孔插接配合,进而实现连接板12与眼镜支架11的固定。在其他实施例中还可以是通过螺栓进行固定。
56.参照和图8和图9,为进一步固定连接板12与眼镜支架11的连接,在鼻托框112的外侧壁设置有第二卡槽200,在连接板12的中部设置有卡接板123,卡接板123与第二卡槽200进行卡接配合。为了进一步加固连接板12和眼镜支架11的连接,在卡接板123以及第二卡槽200的槽壁上设有螺孔(未标出),用螺栓进行固定连接。
57.进一步的,接着参照图8,在连接板12上对称设置有两块底板121,底板121与连接板12一体成型,底板121具体为凹字形板,底板121的两端形成凸起1211,所以底板121的两端凸起1211能够与第一卡槽100卡接配合,这样的设置可以加固连接板12与眼镜支架11的连接,另外底板121两端的凸起1211之间形成缺口1212,缺口1212的存在给后镜片22的移动提供了足够的空间,避免了后镜片22在移动过程中被卡住。
58.在连接板12的两端设置有镜腿5,镜腿5通过销轴与连接板12进行铰接,镜腿5能够向鼻托3所在的位置进行收缩转动,在不使用时,便于收纳和存放。
59.本技术实施例一种可自动调节度数的智能眼镜的实施原理为:利用光学原理设置渐进多焦点的前镜片21和后镜片22,将前镜片21卡接在眼镜支架11上,将后镜片22与调节组件4连接,调节组件4能够使后镜片22远离或靠近鼻托3进行水平移动,实现前镜片21和后镜片22相对位置的改变,从而实现度数的调节。
60.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。