1.本发明涉及一种连续梁检查车升降平台,属于铁路连续梁桥检查设备。
背景技术:
2.连续梁桥在铁路中比较常见,一般采用通长轨道走行式检查车,自带升降平台以便适应连续梁桥梁体截面高度变化的特点,且桥梁病害一般出现在连续梁的梁底,升降平台检查梁底是整个桥梁检查的关键。由于需要人工操作升降平台上下升降,边停边检,检查时间长,效率低下,且需要多人站在升降平台上人工查看,增大了人员的高空作业的危险性和不确定性。另外,桥梁检修专业性较强,须请专业的桥梁检修人员,增大了检修的人力成本。
技术实现要素:
3.针对现有技术中所存在的上述技术问题,本发明提出了一种连续梁检查车升降平台,针对铁路连续梁的梁底高度变化的特点,提出了升降平台和梁底变截面高度联动变化的方式方法,同时为了保证视觉采集图像质量,对升降平台进行了同步导向控制,提高了升降平台的平稳性。
4.本发明提出了一种连续梁检查车升降平台,包括:
5.桁架;
6.设置在所述桁架两端的升降机构,所述升降机构带动所述桁架上升或下降;
7.设置在所述桁架上的视觉采集装置,所述视觉采集装置自动扫描梁体底面,识别梁底表面存在的病害并标识出病害的种类及所在的梁体位置;
8.其中,所述升降机构能够根据视觉采集装置扫描的梁体底面信息和桥纵向位置信息,通过设置的升降平台自动升降程序,实现升降平台与梁底变截面高度联动变化,使桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应,自动调节所述桁架的位置,使所述桁架与所述梁体底面的距离保持稳定。
9.本发明的进一步改进在于,所述桁架内设置有数据处理装置,所述数据处理装置包括连接所述视觉采集装置的视觉处理系统,以及连接升降机构的自动升降控制系统。
10.本发明的进一步改进在于,所述连续梁底部设置有连续检查车架,所述连续检查车架的内侧面上设置有导轨;
11.所述桁架的侧面设置有滑动连接所述导轨的导向同步装置。
12.本发明的进一步改进在于,所述导向同步装置包括设置在桁架的侧面的支撑座,所述支撑座的上部设置有与所述导轨滑动相连的导向滑块,下部设置有同步机构。
13.本发明的进一步改进在于,所述导向滑块为l型的结构,并且通过连接钢板连接所述支撑座。
14.所述导向滑块左右布置在导轨两侧,l型结构与导轨的转角相适应。
15.本发明的进一步改进在于,所述导向滑块的外层为钢板,内层为耐磨板。
16.本发明的进一步改进在于,所述同步装置包括设置在支撑座上的支架,所述支架的端部设置有接触在所述导轨上的辅助轮,所述辅助轮上设置有编码器和预压机构。
17.本发明的进一步改进在于,所述视觉采集装置包括布置在桁架顶部的相机,以及安装有数据传输元件和数据存储元件的箱体。
18.本发明的进一步改进在于,所述视觉采集装置还包括光源,在亮度较低时所述光源开启。
19.本发明的进一步改进在于,所述升降机构为提升机、卷扬机或电动葫芦,并通过升降线缆带动所述桁架上升或下降。
20.与现有技术相比,本发明的优点在于:
21.本发明所述一种连续梁检查车升降平台,针对铁路连续梁的梁底高度变化的特点,提出了升降平台和梁底变截面高度联动变化的方式方法,同时为了保证视觉采集图像质量,对升降平台进行了同步导向控制,提高了升降平台的平稳性。
22.本发明检查更快捷、方便,病害自动识别,病害位置可追溯,检测和维修可分离。日常检查时,可连续不间断检测,通过视觉采集装置,自动扫描梁体底面,识别梁底表面存在的病害,标识出病害的种类及所在的梁体位置。在确定了桥梁病害问题后,需要维修的时候,升降平台作为维修平台,可供工作人员站立、行走,携带专业工具对桥梁病害进行处理。
附图说明
23.下面将结合附图来对本发明的优选实施例进行详细地描述,在图中:
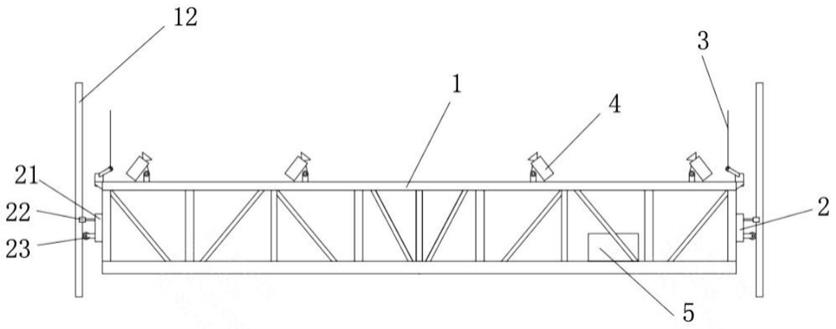
24.图1所示为本发明的一个实施例的连续梁检查车升降平台的结构示意图;
25.图2所示为本发明的一个实施例的导向同步装置的结构示意图;
26.图3所示为本发明的一个实施例的连续梁检查车升降平台在检查车中的安装示意图。
27.附图中,相同的部件使用相同的附图标记。附图并未按照实际的比例绘制。
28.在附图中各附图标记的含义如下:
29.1、桁架,2、导向同步装置,3、升降机构,4、视觉采集装置,5、数据处理装置,11、检查车架,12、导轨,13、连续梁,21、支撑座,22、导向滑块,23、同步机构,24、连接钢板,25、钢板,26、耐磨板。
具体实施方式
30.为了使本发明的技术方案及优点更加清楚明白,以下结合附图对本发明的示例性实施例进行进一步详细的说明。显然,所描述的实施例仅是本发明的一部分实施例,而不是所有实施例的穷举。并且在不冲突的情况下,本发明中的实施例及实施例中的特征可以互相结合。
31.图1示意性地显示了根据本发明的一种连续梁检查车升降平台,包括桁架1。所述桁架1为钢结构或铝合金框架结构,是升降平台的主要承重部件,工作人员可在桁架1内行走,是人工检查、维修的通道和平台。在桁架1的两侧设置有升降机构3,所述升降机构3带动所述桁架1上升或下降。所述桁架1上设置有视觉采集装置4,所述视觉采集装置4自动扫描梁体底面,识别梁底表面存在的病害并标识出病害的种类及所在的梁体位置。
32.其中,所述升降机构3能够根据视觉采集装置4扫描的梁体底面信息和桥纵向位置信息,通过设置的升降平台自动升降程序,实现升降平台与梁底变截面高度联动变化,使桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应,自动调节所述桁架1的位置,使所述桁架1与所述梁体底面的距离保持稳定。整个连续梁检查车升降平台的上下升降运动不需要人工操作、人工预判升降平台与梁底的距离,而是能根据梁体高度变化自动升降,且保持一定的检查视距。因不需要人工检查,人工检查需要边停边检,升降平台可自动升降,连续不间断检查梁底,检查车的行走速度可以较高,检查时间大大缩短,检查效率提高。
33.在一个实施例中,所述桁架1内设置有数据处理装置5,包括视觉处理系统和自动升降控制系统。视觉处理系统连接视觉采集装置4,并根据视觉采集装置4采集的数据信息自动识别病害种类和大小。自动升降控制系统连接升降机构3,实现桁架1与梁底变截面的高度进行联动变化,使桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应,实现在不同的桥纵向行走位置升降平台升降相应的高度,以确保升降平台上的视觉采集系统的相机视野最好,采集的图像质量符合图像处理系统的处理要求。
34.在一个实施例中,所述连续梁底部设置有连续检查车架11,并能够沿连续梁行驶。连续检查车架11为u型的结构,两侧的竖直梁分别在连续梁的的两侧。竖直梁的内侧面上设置有导轨12,导轨12为竖直设置的横截面为矩形的钢轨。所述桁架1的侧面设置有滑动连接所述导轨12的导向同步装置2。
35.在根据本实施例所述的连续梁检查车升降平台中,导轨12设置在连续检查车架11的两侧的内侧面上,为桁架1的升降提供轨道,保证桁架1在升降过程中不会发生偏斜。
36.在一个实施例中,所述导向同步装置2包括设置在桁架1的侧面的支撑座21,所述支撑座21的上部设置有导向滑块22,下部设置有同步机构23。所述导向滑块22与导轨12滑动相连。在桁架1两侧的两个导向同步装置2中同步机构23能够保持两侧同步移动。
37.在一个优选的实施例中,所述支撑座21为钢结构,安装在桁架1的两端。所述导向滑块22安装在支撑座21的上部,与导轨12配合。导向滑块22为l型的结构,并且两个对称设置,其包括围绕在导轨12的外端表面、左端面及右端面的三个板面,其中l型导向滑块22的内角与导轨12的外壁的转角(外端表面与右端面或左端面的连接角)相适应。导向滑块22通过连接钢板24与支撑座21相连。导向滑块22与导轨12之间有间隙,不增加升降阻力,仅起到升降导向作用。
38.在本实施例中,导向滑块22为双层结构,外层为钢板25、内层为耐磨板26,钢板与底座固定连接(如焊接、栓接等),耐磨板26安装在钢板表面,采用螺钉连接。在本实施例中,耐磨板26为高分子量聚乙烯材料,具有耐磨、抗老化、承载能力强等特性,非常适合这种经常反复运动的工况。
39.在一个实施例中,所述同步装置包括设置在支撑座21上的支架,所述支架的端部设置有辅助轮,所述辅助轮上设置有编码器。所述辅助轮上还设置有预压机构。
40.其中,所述辅助轮与导轨12的外端表面接触,并在桁架1上下移动时辅助轮在导轨12上滚动,在滚动时编码器进行计数,记录行走的圈数。对比两组编码器记录的圈数能够判断桁架1的两侧是否同步。
41.优选地,所述辅助轮为聚氨酯轮或塑料轮等软体材料,轮宽可以很窄,可以不具备
导向功能。预压机构给辅助轮提供一定的预压力,使辅助轮始终与导轨12外端面接触。因辅助轮没有动力,不会发生打滑等现象,确保了编码器记录的圈数的正确性。更进一步的预压机构为弹簧结构。
42.在一个实施例中,所述升降机构3为提升机或卷扬机或电动葫芦,安装在桁架1两端。提升机或卷扬机或电动葫芦通过升降线缆带动桁架1升降,升降电缆的上端连接连续检查车架11的上部。
43.在使用根据本实施例所述的连续梁检查车升降平台的过程中,使用方法如下:
44.当日常检测时候,检查车沿桥纵向行走。本实施例所述的连续梁检查车升降平台安装在检查车上沿着导轨12在检查车架11内上下升降,以便检查变高度的连续梁梁底。同步导向装置位于升降平台的两侧,确保升降顺畅,沿着导轨12行走不偏移。同时安装了编码器记录两边的行走圈数,确保两边升降同步,保持升降平台的水平平稳性。
45.通过视觉采集装置4中的相机对连续梁底面的进行全覆盖图像扫描,考虑到铁路天窗时间一般为夜晚时间,专门配置有光源。光源与相机一一对应,保证了相机拍摄的效果。相机拍摄的图像通过有线或无线方式集中传送至箱体内的数据存储元件。接着箱体内的数据传送元件将据存储元件中的图像统一传送至数据处理装置5,其传送可以是实时传送,也可以是检测完后集中传送,传送方式即可以采用无线传送方式,也可以是有线传送方式。
46.数据处理装置5中的视觉处理系统将对图像进行集中处理,建立简易的梁体三维模型,通过对图像的整理训练,识别出裂纹、钢筋外露等典型连续梁梁底常见病害,并在三维模型中标识出病害种类及病害位置,并形成连续梁梁底病害报表,指导后续的桥梁维修工作。
47.因数据处理装置5中的视觉处理系统对图片质量要求较高,对镜头视野距离是有要求的,为确保图像质量,视觉采集装置4的相机须与梁体保持一定的距离或距离范围,这就要求升降平台能根据梁体底部的高度变化而自动升降,如图3所示。
48.根据检查车的行走记录、桥梁设计图和相机,设置升降平台自动升降程序,实现升降平台与梁底变截面高度联动变化,使桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应,实现在不同的桥纵向行走位置升降平台升降相应的高度,以确保升降平台上的视觉采集系统的相机视野最好,采集的图像质量符合视觉处理系统的处理要求。
49.优选地,也可根据安装在检查车行走轮上的编码器读取检查车行走轮运动的圈数,从而确定检查车沿桥纵向行走的不同位置,实现桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应。
50.优选地,可根据北斗等定位系统,实现检查车沿桥纵向行走位置的记录,实现桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应。
51.优选地,也可根据在梁体的不同位置设置不同的感应点,通过传感器感应出检查车沿桥纵向行走位置的记录,实现桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应。
52.优选地,也可根据在梁体的不同位置设置不同的标注点,通过视觉检测出检查车沿桥纵向行走位置的记录,实现桥纵向行走位置与梁体高度、升降平台升降高度三个参数一一对应。
53.当确定了桥梁病害,且需要维修作业时,维修工作人员在前面的连续梁梁底病害报表的指导下,携带专业工具,通过检查车快速到达标识出的桥梁病害位置。维修工作人员通过本发明装置接近梁体底面,根据病害种类做出专业处理。做完一处病害处理后,根据前面的连续梁梁底病害报表指导,继续前行到一个病害地点处理,以此类推,直至完成所有的桥梁病害处理完成。
54.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。因此,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和/或修改,根据本发明的实施例作出的变更和/或修改都应涵盖在本发明的保护范围之内。