1.本实用新型涉及机械手技术领域,特别涉及一种夹取间距可调的机械手。
背景技术:
2.机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。其主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、轻工和原子能等部门。
3.现有的机械设备中,为了对多个产品或物品进行夹取传递,因此,会在机械手上设置有多个夹取装置,并在对应的工位上设置与夹取装置相对应的多个放置位,如:夹取装置为五个,那么放置位就需对应设置五个,若放置位只设置三个、四个或六个时,而此时因夹取装置之间的间距无法进行调节,从而导致放置位无法与夹取装置相对应,使产品在传递过程中出现问题,故只能对工位上的放置位或机械手进行相应更换,最终,导致机械手在对多个产品或物品进行夹取传递时不够灵活,因此,需对现有机械有进行改进。
技术实现要素:
4.本实用新型的目的是在于提供一种多轴调节,灵活性好,可调节夹取间距的机械手。
5.为解决以上技术问题,本实用新型可以采用以下技术方案来实现:
6.一种夹取间距可调的机械手,包括依次连接的夹取组、横向调节组、纵向调节组和移载模组;
7.其中,夹取组包括固定框、第一驱动件、滑动导杆和菱形伸缩架,所述第一驱动件和滑动导杆上下设置的安装在固定框上,在滑动导杆上设置有滑动块,并与第一驱动件连接,所述菱形伸缩架的一端与固定框其中一端的端部连接,另一端则与滑动块连接,在菱形伸缩架的每个转动支点均连接有手指气缸。
8.在其中一个实施例中,所述横向调节组包括固定支架、第二驱动件和移动块,所述第二驱动件安装在固定支架上,且在固定支架上还设置有丝杠,并与第二驱动件连接,所述移动块则设置在丝杠上,并与固定框连接。
9.在其中一个实施例中,所述纵向调节组包括固定立柱、移动立柱和第三驱动件,所述第三驱动件设置在固定立柱上,所述移动立柱则通过第一直线导轨与固定立柱连接,且第一直线导轨与第三驱动件连接,在移动立柱的底部设置在连接板,所述连接板与固定支架连接。
10.在其中一个实施例中,所述移载模组包括固定横板、连接滑块和第四驱动件,所述第四驱动件设置在固定横板上,且在固定横板上还设置有皮带轮组,并与第四驱动件连接,所述连接滑块通过第二直线导轨与固定横板连接,且第二直线滑轨与皮带轮组连接,所述固定立柱与连接滑块固定连接。
11.在其中一个实施例中,所述连接板上设置有长腰形孔,连接板通过螺栓穿过长腰形孔与固定支架螺纹连接。
12.本实用新型的有益效果为:本实用新型夹取间距可调的机械手,当夹取组的多个手指气缸对产品或物品进行夹取后,可通过第一驱动件,驱使滑动块在滑动导杆上进行移动,当滑动块在移动的同时,则会带动菱形伸缩架伸展或收缩,以此调节每个转动支点上手指气缸之间的间距,方便与不同数量的放置位进行配合,便于对产品或物品进行传递,使机械手的灵活性好;另外,夹取组还可通过横向调节组和纵向调节组对其横向位置和纵向位置进行调节,而移载模组则可将夹取组从上一工位移至下一工位,最终,实现机械手的多轴调节,以方便对产品或物品进行夹取与放置。
附图说明
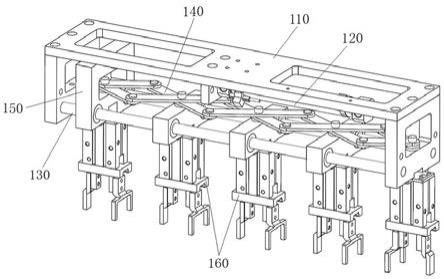
13.图1为本实用新型夹取间距可调的机械手结构示意图;
14.图2为本实用新型夹取间距可调的机械手夹取组结构示意图一;
15.图3为本实用新型夹取间距可调的机械手夹取组结构示意图二;
16.图4为本实用新型夹取间距可调的机械手横向调节组结构示意图;
17.图5为本实用新型夹取间距可调的机械手移载模组结构示意图;
18.图6为本实用新型夹取间距可调的机械手连接板结构示意图。
19.如附图所示:100、夹取组;110、固定框;120、第一驱动件;130、滑动导杆;140、菱形伸缩架;150、滑动块;160、手指气缸;200、横向调节组;210、固定支架;220、第二驱动件;230、移动块;240、丝杠;300、纵向调节组;310、固定立柱;320、移动立柱;330、第三驱动件;340、第一直线导轨;350、连接板;351、长腰形孔;400、移载模组;410、固定横板;420、连接滑块;430、第四驱动件;440、皮带轮组;450、第二直线导轨。
具体实施方式
20.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
21.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的”。
22.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
23.请参阅图1至图3,一种夹取间距可调的机械手,包括依次连接的夹取组100、横向
调节组200、纵向调节组300和移载模组400;其中,夹取组100包括固定框110、第一驱动件120、滑动导杆130和菱形伸缩架140,第一驱动件120和滑动导杆130上下设置的安装在固定框110上,在滑动导杆130上设置有滑动块150,并与第一驱动件120连接,菱形伸缩架140的一端与固定框110其中一端的端部连接,另一端则与滑动块150连接,在菱形伸缩架140的每个转动支点均连接有手指气缸160。
24.具体的,本实施例为了对多个手指气缸160的间距进行调节,因此,在固定框110上分别安装有第一驱动件120和滑动导杆130,并将其上下进行设置,而第一驱动件120可为气缸,同时在滑动导杆130上设置滑动块150,而滑动块150则与第一驱动件120进行连接,将菱形伸缩架140的两端分别与滑动块150、固定框110的一端端部进行连接,而多个手指气缸160则固定在菱形伸缩架140的每个转动支架上,当需要对多个手指气缸160之间的间距进行调节时,第一驱动件120驱动滑动块150在滑动导杆130上进行移动,而滑动块150在移动的同时,会带动菱形伸缩架140进行伸展或收缩,从而调节多个手指气缸160之间的间距,实现产品或物品夹取间距的调节,方便与工位上不同数量的放置位进行匹配,最终,使机械手更加的灵活。
25.而为了使手指气缸160夹取的产品或物品方便传递,因此,将夹取组100与横向调节组200连接,而横向调节组200则与纵向调节组300连接,通过横向调节组200和纵向调节组300分别对夹取组100的横向位置与纵向位置进行调节,而纵向调节组300与移载模组400进行连接,可使夹取组100从上一工位移动至下一工作,最终,实现机械手的多轴调节,方便对产品进行夹取与放置。
26.请参阅图4,横向调节组200包括固定支架210、第二驱动件220和移动块230,第二驱动件220安装在固定支架210上,且在固定支架210上还设置有丝杠240,并与第二驱动件220连接,所述移动块230则设置在丝杠240上,与固定框110连接。
27.在对夹取组100的横向位置进行调节时,第二驱动件220进行工作,而第二驱动件220为电机,第二驱动件220则带动丝杠240进行转动,在丝杠240转动时,驱使丝杠240上的移动块230进行横向移动,而移动块230与固定框110进行连接,当移动块230在进行移动的同时,会带动夹取组100进行移动,最终实现对夹取组100横向位置的调节。
28.请参阅图1,纵向调节组300包括固定立柱310、移动立柱320和第三驱动件330,第三驱动件330设置在固定立柱310上,移动立柱320则通过第一直线导轨340与固定立柱310连接,且第一直线导轨340与第三驱动件330连接,在移动立柱320的底部设置在连接板350,所述连接板350与固定支架210连接。
29.同样的,为了对夹取组100的纵向位置进行调节,第三驱动件330启动,而第三驱动件330可为气缸,因第一直线导轨340与第三驱动件330连接,因此,可驱使第一直线导轨340进行工作,从而使移动立柱320进行纵向移动,移动立柱320底部的连接板350与固定支架210连接,故当移动立柱320在进行纵向移动时,会带动横向调节组200进行纵向移动,最终,带动夹取组100进行纵向移动,以此对夹取组100的纵向位置进行调节。
30.请参阅图5,移载模组400包括固定横板410、连接滑块420和第四驱动件430,第四驱动件430设置在固定横板410上,且在固定横板410上还设置有皮带轮组440,并与第四驱动件430连接,连接滑块420通过第二直线导轨450与固定横板410连接,且第二直线滑轨450与皮带轮组440连接,所述固定立柱310与连接滑块420固定连接。
31.在本实施例中,当夹取组100中的手指气缸160对上一工位的产品或物品进行夹取后,需要将其传递至下一工位,此时,第四驱动件430启动,而第四驱动件430为电机,可带动皮带轮组440进行转动,因第二直线导轨450与皮带轮组440连接,故在皮带轮组440转动时,会带动第二直线导轨450运行,从而带动与第二直线导轨450相连接的连接滑动420进行移动,最终,通过连接滑动420使夹取组100进行移动,以此带动夹取组100从上一工位移至到下一工位。
32.另外,请参阅图6,在本实施例中,因连接板350上设置有长腰形孔351,连接板350通过螺栓穿过长腰形孔351与固定支架210螺纹连接,从而可对横向调节组200与纵向调节组300之间的安装位置进行调节,以此方便对产品进行传递。
33.以上显示和描述了本实用新型的基本原理和主要特征及本实用新型的优点。凡本行业的技术人员均可按说明书附图所示和以上所述而顺畅地实施本实用新型;但是,凡熟悉本专业的技术人员在不脱离本实用新型技术方案范围内,利用以上所揭示的技术内容而作出的些许更动、修饰与演变的等同变化,均为本实用新型的等效实施例;同时,凡依据本实用新型的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本实用新型的技术方案保护范围之内。