1.本发明涉及转动关节,尤其涉及一种减小驱动输出轴附加受载的转动关节与方法。
背景技术:
2.社会对于工业机器人的需求迅速增长。
3.工业机器人上常布置有转动关节,其性能对于机器人的承载能力、重复定位精度等性能指标有较大影响。
4.工业机器人上的转动关节多通过电机进行驱动。电机在正常工作时,其驱动输出轴将承受与转动方向相反的扭矩,该扭矩为驱动输出轴的工作载荷。而在转动关节的实际应用过程中,由于回转件自身存在重量,且回转件常需要承受转动关节的工作载荷,所以转动关节通常还需承受附加载荷,其形式包括轴向载荷、径向载荷与弯矩。
5.在转动关节的设计当中,不宜将附加载荷直接加在驱动输出轴上,这将带来如下问题:
6.其一,与工作载荷不同,附加载荷在电机的设计测试过程当中难以予以充分考虑,若是长期使动力输出轴承受较大的附加载荷,将对电机的工作产生不利影响。
7.其二,动力输出轴承载,尤其是承受弯矩产生的变形将影响回转件回转轴线与转动关节安装部件或者平面间的垂直度,进而降低转动关节的整体精度。
8.因此,设置附加载荷分担装置,降低乃至消除驱动输出轴所承受的附加载荷是有必要的。
9.现有的转动关节中常设置有多个止推轴承与径向轴承,并配合其余部件来完成附加载荷分担的任务。它们结构精巧,能很好的减小驱动输出轴所承受的附加载荷;但现有的装置通常结构复杂,零部件的数目多,零件的制造、装配难度较高,由此带来的制造、维护成本均难以降低。
10.将该种转动关节,运用在低成本中等精度要求的设备上是不太合适的。因此,有必要提出一种适用于低成本中等精度设备的轻型转动关节设计。
技术实现要素:
11.本发明的目的在于克服上述现有技术的缺点和不足,提供一种减小驱动输出轴附加受载的转动关节与方法。本发明通过将电机输出轴的载荷,传导至与电机基座连接的外部安装部件上,显著减小了电机输出轴承担的附加载荷。
12.本发明转动关节可提高回转件回转轴线与转动关节安装平面间的垂直度,且为服务于转动关节上的电机提供更优的工作条件。
13.本发明通过下述技术方案实现:
14.一种减小驱动输出轴附加受载的转动关节,包括电机2,及其电机基座1和机座端盖7;所述转动关节还包括回转件3和止推轴承5;
15.所述止推轴承5包括带有法兰基座的轴承内套4和轴承外套6;
16.所述回转件3,与轴承内套4的法兰固定连接;
17.所述轴承外套6的法兰,与机座端盖7固定连接;
18.所述轴承内套4的轴套,与电机2输出轴的轴杆固定连接;
19.所述回转件3的中部通过螺栓,与电机2输出轴的顶端螺纹连接。
20.所述止推轴承5位于轴承外套6的基座内,轴承内套4的轴套位于止推轴承5的轴孔内;
21.所述回转件3的中部通过螺栓,与电机2输出轴的顶端紧固连接,使得轴承内套4和轴承外套6,为止推轴承5提供一个夹持或者互相压紧力矩。
22.所述机座端盖7与电机基座1之间通过螺栓固定;电机基座1则与外部安装部件通过螺栓相固定。
23.所述回转件3通过螺栓与轴承内套4的法兰固定连接;
24.轴承外套6的法兰通过螺栓,与机座端盖7固定连接。
25.所述电机2输出轴的轴杆与轴承内套4的轴套之间设置有键。
26.所述电机2的本体通过螺栓,与机座端盖7和/或电机基座1固定连接。
27.所述回转件3用于连接机械臂8;电机2转动时,机械臂8跟随回转件3同步转动。
28.一种减小驱动输出轴附加载荷的方法,包括如下步骤:
29.将回转件3与轴承内套4的法兰连接,使得附加载荷从回转件3上转移至轴承内套4上;将轴承外套6的法兰,与机座端盖7固定连接;再将回转件3的中部通过螺栓,与电机2输出轴的顶端螺纹连接;当电机2驱动机械臂8运动时,轴承内套4则将附加载荷施加到止推轴承5上,止推轴承5再将附加载荷传递给轴承外套6以及机座端盖7,继而传导至电机基座1,以及与电机基座1连接的外部安装部件上。
30.止推轴承(5)的选型步骤:
31.回转件(3)的重量为g1,轴承内套的重量为g2,回转件(3)的质心与其回转轴之间的距离为l1,回转件(3)上所受的工作载荷为f
l
,其与回转件(3)回转轴之间的距离为l2;根据转动关节的尺寸,初步确定一型号的止推轴承,其内径为d。
32.止推轴承所受的轴向外力fa可以近似按如下公式进行计算,
[0033][0034]
确定轴向外力fa后,确定止推轴承(5)上所承受的径向载荷与轴向载荷,继而确定止推轴承(5)的当量静载荷p0;
[0035]
确定选取的止推轴承(5)的额定静载荷c0;确定所需的最小静强度安全系数s1;根据下式计算静强度安全系数s0的值,
[0036][0037]
若安全系数s0大于所要求值s1,止推轴承(5)的选型完成;若是小于所要求值s1,则增加止推轴承(5)的直径,再重复计算过程,直至安全系数s0符合要求。
[0038]
本发明相对于现有技术,具有如下的优点及效果:
[0039]
本发明止推轴承5包括带有法兰基座的轴承内套4和轴承外套6;回转件3,与轴承内套4的法兰固定连接;轴承外套6的法兰,与机座端盖7固定连接;轴承内套4的轴套,与电机2输出轴的轴杆固定连接;回转件3的中部通过螺栓,与电机2输出轴的顶端螺纹连接;回转件3的中部通过螺栓,与电机2输出轴的顶端紧固连接,使得轴承内套4和轴承外套6,为止推轴承5提供一个夹持或者互相压紧力矩。当电机2驱动机械臂8运动时,轴承内套4则将附加载荷施加到止推轴承5上,止推轴承5再将附加载荷传递给轴承外套6以及机座端盖7,继而传导至电机基座1,以及与电机基座1连接的外部安装部件上。通过上述传导的方式,将电机2驱动输出轴所受的附加载荷进行传导,不仅大幅降低电机2驱动输出轴的负荷,以较低的成本改善电机的工作条件,而且大大延长了电机的寿命。
[0040]
本发明技术手段简便易行,构思巧妙;通过将回转件的重量及回转件所受的工作载荷等附加载荷,通过推力轴承(推力球轴承)及电机机座直接传导至安装部件或者安装平面上,从而有效地减小电机输出轴所受的附加载荷。
[0041]
本发明对止推轴承的选型,给出了简便易行的筛选方法,使得止推轴承对电机输出轴的载荷减低到最小,更加有利于使整个转动关节的运行平稳、精度及安全系数达到设计符合。
[0042]
本发明采用上述结构,不仅以较低的成本提高回转件回转轴与转动关节安装平面的垂直度,而且有效减小了系统误差,积极有利于地提高运用该转动关节的机构的精度。
附图说明
[0043]
图1为本发明所述转动关节装配剖视示意图。
[0044]
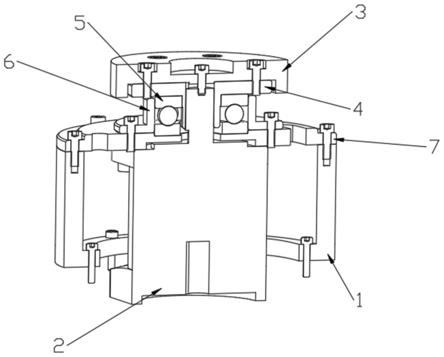
图2为图1主要部件爆炸示意图。
[0045]
图3为机械臂与转动关节的连接及应用示范图。
具体实施方式
[0046]
下面结合具体实施例对本发明作进一步具体详细描述。
[0047]
如图1-3所示。本发明公开了一种减小驱动输出轴附加受载的转动关节,包括电机2,及其电机基座1和机座端盖7;所述转动关节还包括回转件3和止推轴承5;
[0048]
所述止推轴承5包括带有法兰基座的轴承内套4和轴承外套6;
[0049]
所述回转件3,与轴承内套4的法兰固定连接;电机输出轴的动力被传递至回转件3上,这样,电机2即可驱动回转件3进行运动;
[0050]
所述轴承外套6的法兰,与机座端盖7固定连接;
[0051]
所述轴承内套4的轴套,与电机2输出轴的轴杆固定连接;使得动力从电机2的输出轴上传递至轴承内套4上。
[0052]
所述回转件3的中部通过螺栓,与电机2输出轴的顶端螺纹连接。
[0053]
所述止推轴承5位于轴承外套6的基座内,轴承内套4的轴套位于止推轴承5的轴孔内;
[0054]
所述回转件3的中部通过螺栓,与电机2输出轴的顶端紧固连接,使得轴承内套4和轴承外套6,为止推轴承5提供一个夹持或者互相压紧力矩。
[0055]
所述机座端盖7与电机基座1之间通过螺栓固定;电机基座1则与外部安装部件(图
中未示出)通过螺栓相固定。
[0056]
所述回转件3通过螺栓与轴承内套4的法兰固定连接;
[0057]
轴承外套6的法兰通过螺栓,与机座端盖7固定连接。
[0058]
所述电机2输出轴的轴杆与轴承内套4的轴套之间设置有键。
[0059]
电机2的本体通过螺栓,与机座端盖7和/或电机基座1固定连接。
[0060]
所述回转件3用于连接机械臂8;电机2转动时,机械臂8跟随回转件3同步转动。
[0061]
减小电机2驱动其输出轴所承受的附加载荷是有必要的。本发明采取将附加载荷从回转件3上传导至机座1上的方法来实现。
[0062]
本发明减小驱动输出轴附加载荷的方法,可通过如下步骤实现:
[0063]
将回转件3与轴承内套4的法兰连接,使得附加载荷从回转件3上转移至轴承内套4上;将轴承外套6的法兰,与机座端盖7固定连接;再将回转件3的中部通过螺栓,与电机2输出轴的顶端螺纹连接;当电机2驱动机械臂8运动时,轴承内套4则将附加载荷施加到止推轴承5上,止推轴承5再将附加载荷传递给轴承外套6以及机座端盖7,继而传导至电机基座1,以及与电机基座1连接的外部安装部件上(图中未示出)。由此,电机2驱动输出轴所受的附加载荷被大大降低。
[0064]
本发明对止推轴承5的选型过程如下:
[0065]
回转件3的重量为g1,轴承内套的重量为g2,回转件3的质心与其回转轴之间的距离为l1,回转件3上所受的工作载荷为f
l
,其与回转件3回转轴之间的距离为l2。
[0066]
根据转动关节的大小初步确定一型号的止推轴承5,其内径为d。
[0067]
止推轴承5所受的轴向外力fa可以近似按如下公式进行计算,
[0068][0069]
确定轴向外力fa后,根据相应的数据、表格及算法,可以确定止推轴承5上所承受的径向载荷与轴向载荷,继而确定止推轴承5的当量静载荷p0。可以认为在正常工作条件下,转动关节的旋转是缓慢的,因此按照静强度条件进行验算校核。
[0070]
查阅国家标准,可以确定选取的止推轴承5的基本额定静载荷c0;
[0071]
确定所需的最小静强度安全系数s1;
[0072]
根据下式计算静强度安全系数s0的大小,
[0073][0074]
若安全系数s0大于所要求值s1,止推轴承5的选型完成,若是小于所要求值s1,则换用更大直径的止推轴承5,在重复上述计算过程,直至安全系数s0符合要求。
[0075]
如图3中,若将该种机械臂8安装在本发明回转体3上。
[0076]
其一,由于载荷传导的作用,电机2的工作条件得到极大改善,另外机械臂8的寿命有所提高;
[0077]
其次臂8与安装部件(或者安装平面)间的平行度有提高,从而提高机械臂整体定位精度。
[0078]
本发明采取简单且易于制造、装配的轻型转动关节,使得其将回转件的重量及回
转件所受的工作载荷等,附加载荷通过推力轴承(推力球轴承)及电机机座直接传导至安装平面上,从而减小驱动输出轴所受的附加载荷。
[0079]
本发明不仅以较低的成本改善电机的工作条件,延长电机的寿命。而且以较低的成本提高回转件回转轴,与转动关节安装平面的垂直度,减小了系统误差,有利于提高运用该转动关节的机构的精度。
[0080]
如上所述,便可较好地实现本发明。
[0081]
本发明的实施方式并不受上述实施例的限制,其他任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。