1.本实用新型涉及电动螺丝刀技术领域,具体为一种电动螺丝刀的全硬件驱动电路。
背景技术:
2.电动螺丝刀,别名电批、电动起子,是用于拧紧和旋松螺钉用的电动工具。该电动工具装有调节和限制扭矩的机构,主要用于装配线,是大部分生产企业必备的工具之一,电动螺丝刀内部设置有相应驱动电路,用于带动其进行螺丝的旋紧和旋松操作。由于国际大环境影响,单片机生产及应用受限,所以部分企业在电动螺丝刀上改用全硬件电路,但是现有全硬件驱动电路结构都较为简单,不能实现相应保护,导致当马达电流过大时螺丝刀易损坏,甚至导致元件高温外壳溶化的情况发生。此外,现有全硬件驱动电路中的马达一般不能刹车,使用起来极其不便。
3.因此,我们提出了一种电动螺丝刀的全硬件驱动电路。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种电动螺丝刀的全硬件驱动电路,解决了现有全硬件驱动电路结构简单,且易由于马达电流过大而导致螺丝刀损坏,甚至某些元件高温所产生的各种问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种电动螺丝刀的全硬件驱动电路,包括电路控制接地点,所述控制接地点包括系统地和电池负极的接点,以及功率地与电池负极接点。所述驱动电路中设置有电池保护芯片ic2和q1,且电池保护芯片ic2通过控制q1使系统地域电池负极断路或短路。
8.优选的,所述系统地与电池负极短路时为正常工作状态,且系统地与电池负极断路时为保护状态。
9.优选的,所述q1的ds端并联有电阻r16。
10.优选的,所述驱动电路设置有k1和k2两个控制端。
11.优选的,所述驱动电路中设置有q4和q5,所述q4和q5通过电阻提供电压,并使其始终处于导通状态。
12.(三)有益效果
13.本实用新型提供了一种电动螺丝刀的全硬件驱动电路。具备以下有益效果:
14.1、该电动螺丝刀的全硬件驱动电路,通过电池保护芯片ic2控制q1截止与导通的设置,能够使系统地与电池负极处于断路或短路,同时该电路处于正常工作或保护状态中,从而能够通过控制k1和k2的启闭状态调节整机状态,从而能够达到对电路进行过流保护的效果,解决了现有硬件驱动电路结构简单,且易由于过流而导致螺丝刀损坏甚至发生元件
高温的问题。
15.2、该电动螺丝刀的全硬件驱动电路,通过驱动电路中q4和q5经电阻提供电压的设置,能够使马达正负极始终处于导通即马达刹车状态,进而控制q8和q9的导通来对马达的正反转进行调控,解决了现有硬件驱动电路中马达难以根据需求进行刹车,从而导致该电动螺丝刀工作效率低下的问题。
附图说明
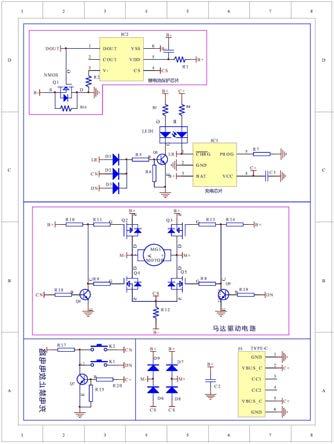
16.图1为本实用新型全硬件驱动电路的示意图。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅该电路图,本实用新型实施例提供一种技术方案:一种电动螺丝刀的全硬件驱动电路,包括电路控制接地点,控制接地点包括系统地和功率地与电池负极的接点,驱动电路中设置有电池保护芯片ic2和q1,且电池保护芯片ic2通过控制q1使系统地与电池负极断路或短路;
19.在本实施例中,需要补充说明的是,通过电池保护芯片ic2控制q1截止与导通的设置,能够使系统地与电池负极处于断路或短路,同时该电路处于保护状态或正常工作状态中,从而能够通过控制k1和k2的启闭状态调节整机状态,从而能够达到对电路进行过流保护的效果,解决了现有硬件驱动电路结构简单且易由于过流而导致螺丝刀损坏,甚至出现元件高温导致的各种问题。
20.在本实施例中,需要补充说明的是,系统地与电池负极短路时为正常工作状态,且系统地与电池负极断路时为保护状态;
21.在本实施例中,需要补充说明的是,q1的ds端并联有电阻r16;
22.其中,当过流状态发生后,ic2控制q1的ds断开,系统地悬空,马达停止工作,松开k1或k2后,由于电阻r16并联在q1的ds端,系统地的高电平通过r16很快的泄放掉,q1的ds端等电位,ic2控制q1打开使q1的ds导通,整机处于待机状态。再次按下k1或k2马达又开始工作;这样起到过流保护的作用并在k1或k2释放后迅速自动解除保护。
23.在本实施例中,需要补充说明的是,驱动电路设置有k1和k2两个控制端。
24.在本实施例中,需要补充说明的是,驱动电路中设置有q4和q5,q4和q5通过电阻提供电压,并使其始终处于导通状态;
25.其中,通过驱动电路中q4和q5经电阻提供电压的设置,能够使q4,q5始终处于导通即马达刹车状态,进而控制q8和q9的导通来对马达的正反转进行调控,解决了现有全硬件驱动电机中马达难以根据需求进行刹车导致该电动螺丝刀工作效率低下的问题。
26.本实用新型的工作原理及使用流程:当按下k1或k2时,此时马达处于工作状态,当流经马达的电流大于额定电流(或马达短路)时,ic2的dout脚输出低电平使q1截止,系统地(q1的d端)相对电池负极为高电平,三极管q8,q9截止,整个电路停止工作。松开k1或k2后,
由于电阻r16并联在q1的ds端,系统地的高电平通过r16很快的泄放掉,q1的ds端等电位,ic2控制q1打开使q1的ds导通,整机处于待机状态。再次按下k1或k2马达又开始工作。这样起到过流保护的作用并在k1或k2释放后迅速自动解除保护,当其正常工作时,q4,q5通过电阻提供电压,始终处于导通(使马达刹车)状态,通过控制q8或q9的导通就可以实现马达的正反转。
27.以上显示和描述了本实用新型的基本原理和主要特征以及本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种电动螺丝刀的全硬件驱动电路,其特征在于:包括电路控制接地点,所述控制接地点包括系统地和功率地与电池负极的接点,所述驱动电路中设置有电池保护芯片ic2和q1,且电池保护芯片ic2通过控制q1使系统地与电池负极断路或短路。2.根据权利要求1所述的一种电动螺丝刀的全硬件驱动电路,其特征在于:所述系统地与电池负极短路时为正常工作状态,且系统地与电池负极断路时为保护状态。3.根据权利要求1所述的一种电动螺丝刀的全硬件驱动电路,其特征在于:所述q1的ds端并联有电阻r16。4.根据权利要求1所述的一种电动螺丝刀的全硬件驱动电路,其特征在于:所述驱动电路设置有k1和k2两个控制端,或使用k1或k2其中一个做控制端。5.根据权利要求1所述的一种电动螺丝刀的全硬件驱动电路,其特征在于:所述驱动电路中设置有q4和q5,所述q4和q5通过电阻提供电压,并使其始终处于导通状态。
技术总结
本实用新型公开了一种电动螺丝刀的全硬件驱动电路,包括电路控制接地点,所述控制接地点包括系统地和功率地与电池负极的接点,所述驱动电路中设置有电池保护芯片IC2和Q1,且电池保护芯片IC2通过控制Q1使系统地与电池负极断路或短路;该电动螺丝刀的驱动电路,通过电池保护芯片IC2控制Q1截止与导通的设置,能够通过控制系统地与电池负极的通断,从而能够达到对电路进行过流保护的效果,解决了现有硬件驱动电路结构简单无法进行过流保护的问题;同时驱动电路中Q4和Q5通过电阻提供电压,能够控制Q4和Q5的导通来对马达正负极进行短路,实现刹车的目的,解决了现有硬件驱动电路马达难以刹车的问题。以刹车的问题。以刹车的问题。
技术研发人员:金新华 宋学彬
受保护的技术使用者:苏州市新方纬电子有限公司
技术研发日:2021.08.02
技术公布日:2022/1/28