1.本实用新型属于机器人工具快换技术领域,特别涉及一种用于工具快换装置的安全供气装置。
背景技术:
2.随着现代工业自动化技术的发展,人们对于自动化线整体节拍及整线自动化程度要求越来越高且随着人们对产品的个性化需求越来越多,多品种小批量混合生产方式将成为自动化线主流,从而对机器人前端工具快换装置的需求越来越大。机器人工具快换装置,又叫工具快换盘、换枪盘、快换工具盘、快速更换器、快换器、快换夹具、治具快换等,它是工业机器人行业使用在末端执行器的一种柔性连接工具。工业机器人工具快换盘是高性能工业机器人系统上主要的组成部分,能够是机器人充分发挥性能,完成多种作业,提高机器人的性价比。
3.现在机器人工具快换装置,在调试和生产过程偶尔发生工具脱落问题,主要原因是人工误操作,程序错乱,电磁干扰等。
技术实现要素:
4.为了解决上述技术问题,本实用新型提出了一种用于工具快换装置的安全供气装置,避免在人工调试时或程序错乱时导致的工具盘异常脱落,避免造成设备损坏,人员受伤。
5.为实现上述目的,本实用新型采用以下技术方案:
6.一种用于工具快换装置的安全供气装置,包括主盘供气模块1、工具盘配合模块2和停靠站3:
7.所述主盘供气模块1包括电磁阀11、电磁阀供气壳体12、第一触发模块13、气接头组14和与工具盘配合模块2相连的第一连接模块15;其中气接头组14 包括进气接头141、第一出气接头142和第二出气接头143;
8.所述工具盘配合模块2包括触发第一触发模块13的触发壳体21、第二触发模块23;所述停靠站3上设置第二触发模块23的触发模块31;
9.所述电磁阀供气壳体12通过进气接头141与电磁阀11的输入端子相连;所述电磁阀11的第一输出端子通过第一出气接头142与工具快换装置的锁紧缸体相连;所述电磁阀11的第二输出端子通过第二出气接头143与工具快换装置的释放缸体相连。
10.进一步的,所述工具盘配合模块2还包括第二触发模块接插件22;
11.所述第二触发模块23通过第二触发模块接插件22与工具盘配合模块2相连。
12.进一步的,所述第二触发模块23和第二触发模块接插件22设置导线24;所述第二触发模块23通过导线24与工具盘配合模块2柔性连接。
13.进一步的,所述电磁阀11、第一触发模块13、气接头组14和与工具盘配合模块2相连的连接模块15均设置在电磁阀供气壳体12上。
14.进一步的,所述主盘供气模块1上还包括与控制模块连接的电磁阀控制接插件;所述控制模块通过控制信号与电磁阀11通信连接。
15.进一步的,所述工具盘配合模块2上还设置与第一连接模块15相匹配的第二连接模块25。
16.进一步的,所述第一连接模块15包括但不限于连接探针;所述第二连接模块25包括但不限于连接探针接插件。
17.发明内容中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
18.本实用新型提出了一种用于工具快换装置的安全供气装置,包括主盘供气模块1、工具盘配合模块2和停靠站3:主盘供气模块1包括电磁阀11、电磁阀供气壳体12、第一触发模块13、气接头组14和与工具盘配合模块相连的第一连接模块15;其中气接头组14包括进气接头141、第一出气接头142和第二出气接头143工具盘配合模块包括触发第一触发模块13的触发壳体21、第二触发模块 23;停靠站3上设置第二触发模块23的触发模块31;电磁阀供气壳体12通过进气接头141与电磁阀11的输入端子相连;电磁阀11的第一输出端子通过第一出气接头142与工具快换装置的锁紧缸体相连;电磁阀11的第二输出端子通过第二出气接头143与工具快换装置的释放缸体相连。工具盘停靠站为工具盘存放位置,工具盘只有在停靠站位置时,才能被释放。本实用新型能够实现工具盘的释放在工具盘停靠站进行,避免在人工调试时或程序错乱时导致的工具盘异常脱落,避免造成设备损坏,人员受伤。
附图说明
19.如图1为本实用新型实施例1一种用于工具快换装置的安全供气装置整体结构示意图;
20.如图2为本实用新型实施例1主盘供气模块的剖面图;
21.如图3为本实用新型实施例1主盘供气模块的俯视图;
22.如图4为本实用新型实施例1工具盘配合模块的立体结构示意图;
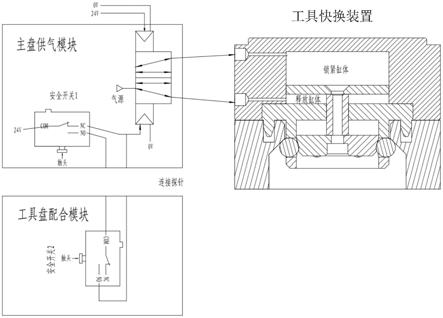
23.如图5为本实用新型实施例1一种用于工具快换装置的安全供气装置实现原理示意图;
24.图中:主盘供气模块1;电磁阀11;电磁阀供气壳体12;第一触发模块13;气接头组14;第一连接模块15;进气接头141;第一出气接头142、第二出气接头143;工具盘配合模块2;触发壳体21;第二触发模块接插件22;第二触发模块23;导线24;第二连接模块25;停靠站3;触发模块31;工具快换装置4。
具体实施方式
25.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本实用新型进行详细阐述。下文的公开提供了许多不同的实施例或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。此外,本实用新型可以在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。应当注意,在附图中所图示的部件不一定按比例绘制。本实用新型省略了对公知组件和处理技术及工艺的描述以避免不
必要地限制本实用新型。
26.实施例1
27.本实用新型实施例1提出了一种用于工具快换装置的安全供气装置;如图1 为本实用新型实施例1一种用于工具快换装置的安全供气装置整体结构示意图。该装置包括主盘供气模块1、工具盘配合模块2、工具停靠站3和工具快换装置4;在停靠站3上设置触发工具盘配合模块2上第二触发模块23的触发模块31。工具停靠站为工具盘存放位置,工具盘只有在停靠站位置时,才能被释放。
28.如图2为本实用新型实施例1主盘供气模块的剖面图;如图3为本实用新型实施例1主盘供气模块的俯视图;
29.主盘供气模块1包括电磁阀11、电磁阀供气壳体12、第一触发模块13、气接头组14和与工具盘配合模块2相连的第一连接模块15;其中气接头组14包括进气接头141、第一出气接头142和第二出气接头143;
30.电磁阀供气壳体12用于给电磁阀11供气,其中电磁阀供气壳体12的输出端通过进气接头141连接电磁阀11的输入端子;电磁阀11的第一输出端子通过第一出气接头142连接工具快换装置4的锁紧缸体;电磁阀11的第二输出端子通过第二出气接头143连接工具快换装置4的释放缸体.
31.在电磁阀供气壳体12安装电磁阀11、第一触发模块13、气接头组14和与工具盘配合模块2相连的第一连接模块15。
32.其中在主盘供气模块1上还设置与控制模块连接的电磁阀控制接插件;控制模块通过控制信号与电磁阀11通信连接,用于控制电磁阀11执行各种操作。
33.本技术实施例1中第一触发模块采用第一行程开关,第二触发模块采用第二行程开关,本发明保护的范围不局限于实施例1中给出的元件,本领域人员可以根据需求选择其他的触发机构。
34.如图4为本实用新型实施例1工具盘配合模块的立体结构示意图;工具盘配合模块2包括触发第一触发模块13的触发壳体21、第二触发模块23。
35.工具盘配合模块2还包括第二触发模块接插件22;
36.第二触发模块23通过第二触发模块接插件22与工具盘配合模块2相连。
37.第二触发模块23与工具停放站3配合使用,工具停靠站3设有第二触发模块23的触发模块31,第二触发模块23和第二触发模块接插件22设置导线24;第二触发模块23通过导线24与工具盘配合模块2柔性连接。可根据工具盘与工具停放站的各种位置关系进行变更位置安装,第二触发模块23可根据使用使用需要变更样式和型号。
38.如图5为本实用新型实施例1一种用于工具快换装置的安全供气装置实现原理示意图;
39.在主盘供气模块1不吸合工具盘配合模块2时,工具盘触发壳体21不接触第一触发模块13的触头,第一触发模块13nc(常闭)侧导通,该侧电磁阀控制线圈正常导通,该侧电磁阀可正常通电按需要被控制,另一侧电磁阀可以是弹簧复位电磁阀或电圈控制,从而控制压缩空气的通气位置,从而控制机器人工具快换装置4的锁紧和释放。
40.第二触发模块23通过导线24与工具盘配合模块2连接,根据需要设定不同的安装位置,在主盘供气模块1吸合工具盘配合模块2时,第一触发模块13的触头被触发,第一触发
模块13导通no(常开)侧,第一触发模块13no侧通过弹簧探针与第二触发模块23连接。
41.在工具快换装置4不在停靠站3上时,第二触发模块23的触头未被停靠站3 的第二触发模块23的触发模块31触发,第二触发模块23nc(常闭)侧导通,根据接线原理,第二触发模块23nc(常闭)侧导通,该侧电磁阀控制线圈无法导通,该侧电磁阀无法被控制,该侧电磁阀动作,将为机器人工具快换装置通释放工具盘的压缩空气,而此时该侧电磁阀不能导通被控制,因此无法给机器人工具快换通释放的压缩空气,工具盘无法被释放。此时无论是人工操作还是程序控制都无法释放工具盘,避免人工误操作和程序的错误导致的工具盘异常脱落。
42.如果工具快换装置4在工具停放站3,第二触发模块23的触头被工具停靠站 3的第二触发模块23触发模块31触发,第二触发模块23no(常开)侧导通,根据接线原理,第二触发模块23no(常开)侧导通,该侧电磁阀控制线圈正常导通,该侧电磁阀可正常通电按需要被控制,另一侧电磁阀可以是弹簧复位电磁阀或电圈控制,从而控制压缩空气的通气位置,正常控制机器人工具快换装置的锁紧和释放。
43.所以本实用新型能够实现工具盘的释放在工具盘停靠站进行,避免在人工调试时或程序错乱时导致的工具盘异常脱落,避免造成设备损坏,人员受伤。
44.上述虽然结合附图对本实用新型的具体实施方式进行了描述,但并非对本实用新型保护范围的限制。对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的修改或变形。这里无需也无法对所有的实施方式予以穷举。在本实用新型的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本实用新型的保护范围以内。