1.本实用新型涉及一种机械手结构,更具体的说是涉及一种土方直剪机的上料机械手结构。
背景技术:
2.土的抗剪强度是土体在荷载的作用下,具有抵抗剪切破坏的能力,土的抗剪强度作为土的一个重要力学性质,在计算地基土的承载力,凭借地基的承载能力和稳定性,计算基坑和天然边坡的稳定性及挡土建筑物的土应力时都需要土的抗剪强度指标,土的寄=抗剪强度在室内试验中主要是通过直接剪切和三轴剪切试验方法测得,通常室内直剪试验采用固结快剪方法,为了恢复土的天然应力状态,需在试验前对土样进行预压固结,加荷荷载的细化及土样预压时受力稳定是土样预压固结的关键技术。
3.现有技术中均是通过设置一台机械设备来实现对于土方进行直剪检测,目前现有的机械设备在进行土方检测的过程中,上料方式都是采用人手工的抓取待检测的土方放置到检测平台的方式,如此便会大大的增加在土方检测的过程中人的工作量,因此现有技术中出现了一种通过机械手代替人手上料的方式,但是在土方检测的过程中,需要上料动作的部件有上不透水板和下不透水板以及物料和抓取活动剪切盒以及固定剪切盒,上述部件中有方形和圆形,因而在上料的过程中要设置两个机械手,如此一方面增加了整台设备的成本,另一方面也需要两台机械手之间具备较好的配合动作,因此也增加了整台设备的程序复杂度。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种可以降低设备的成本以及程序复杂度的土方直剪机的上料机械手结构。
5.为实现上述目的,本实用新型提供了如下技术方案:一种土方直剪机的上料机械手结构,包括安装在外部机架上的机械臂和安装在机械臂上的爪头,所述爪头包括爪杆、爪板、圆爪头和方爪头,所述爪杆的上端与机械臂连接,所述爪板安装在爪杆的下端上,所述爪板呈长条状设置,所述圆爪头安装在爪板的一端上,方爪头安装在爪板的另一端上,以抓取上不透水板和下不透水板以及物料和抓取活动剪切盒以及固定剪切盒。
6.作为本实用新型的进一步改进,所述圆爪头包括三爪气缸和三根夹持杆,所述三爪气缸的上端固定在爪板下侧面的一端上,所述夹持杆均为l型杆,三根所述夹持杆一一对应的安装在三爪气缸的三个滑轨上,以在相邻的夹持杆之间的构成用于容纳上不透水板和下不透水板以及物料的空间。
7.作为本实用新型的进一步改进,所述方爪头包括双向气缸和两个方爪板,所述双向气缸的缸体固定在爪板下侧面背向圆爪头的一端上,两个所述方爪板分别固定在双向气缸的两个推动杆上,以在两个方爪板之间构成用于夹持活动剪切盒以及固定剪切盒的空间。
8.作为本实用新型的进一步改进,所述方爪板包括连接部和夹持部,所述双向气缸具有四根推动杆,在缸体上呈正方形分布,其中在正方形上呈对角设置的两根推动杆为一组,分别设置在双向气缸的缸体的两端上,所述连接部固定安装在推动杆上,所述夹持部上套接有摩擦板。
9.本实用新型的有益效果,通过机械臂和爪头的设置,便可有效的实现自动化抓取部件和原料的效果,而通过将爪头设置成爪板、圆爪头和方爪头的组合结构,如此便可利用圆爪头来抓取圆形的物料和上不透水板以及下不透水板,利用方爪头抓取方形的活动剪切盒和固定剪切盒,这样便不需要使用两个机械手来抓取物料和各个部件了,一方面有效的降低了设备的结构成本,另一方面简化了设备的程序复杂度。
附图说明
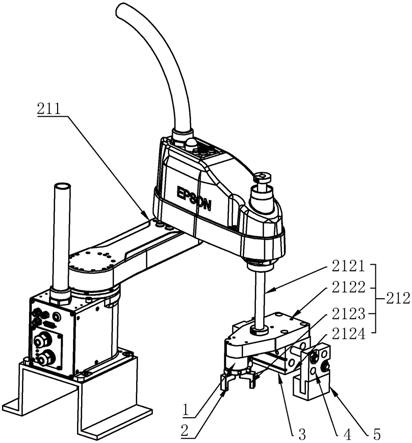
10.图1为本实用新型的土方直剪机的上料机械手结构的整体结构图。
具体实施方式
11.下面将结合附图所给出的实施例对本实用新型做进一步的详述。
12.参照图1所示,本实施例的一种土方直剪机的上料机械手结构,包括安装在外部机架上的机械臂211和安装在机械臂211上的爪头212,所述爪头212包括爪杆2121、爪板2122、圆爪头2123和方爪头2124,所述爪杆2121的上端与机械臂211连接,所述爪板2122安装在爪杆2121的下端上,所述爪板2122呈长条状设置,所述圆爪头2123安装在爪板2122的一端上,方爪头2124安装在爪板2122的另一端上,以抓取上不透水板和下不透水板以及物料和抓取活动剪切盒以及固定剪切盒,在使用本实施例的上料机械手结构的过程中,只需要启动机械臂211,如此机械臂211便会首先动作,先带着方爪头2124移动到固定剪切盒的上方,抓取固定剪切盒放置到检测平台上,然后再旋转带着圆爪头2123移动到下不透水板的上方,抓取下不透水板放入到固定剪切盒内,然后再旋转带着方爪头2124移动到活动剪切盒的上方,抓取移动剪切盒放置到固定剪切盒上,之后再旋转带着圆爪头2123移动到上不透水板的上方,抓取上不透水板放入到活动剪切盒内,如此完成上料准备,如此通过上述结构的设置,便可实现利用一个爪头212来抓取形状不同的剪切盒结构和工装部件了,且整体结构简单。
13.作为改进的一种具体实施方式,所述圆爪头2123包括三爪气缸1和三根夹持杆2,所述三爪气缸1的上端固定在爪板2122下侧面的一端上,所述夹持杆2均为l型杆,三根所述夹持杆2一一对应的安装在三爪气缸1的三个滑轨上,以在相邻的夹持杆2之间的构成用于容纳上不透水板和下不透水板以及物料的空间,通过上述结构的设置,便可有效的抓取住上不透水板和下不透水板的圆周边了,实现平稳抓取圆柱状的上不透水板、下不透水板和物料了。
14.作为改进的一种具体实施方式,所述方爪头2124包括双向气缸3和两个方爪板4,所述双向气缸3的缸体固定在爪板2122下侧面背向圆爪头2123的一端上,两个所述方爪板4分别固定在双向气缸3的两个推动杆上,以在两个方爪板4之间构成用于夹持活动剪切盒以及固定剪切盒的空间,如此便可有效的实现平稳抓取方形的活动剪切盒和固定剪切盒了。
15.作为改进的一种具体实施方式,所述方爪板4包括连接部和夹持部,所述双向气缸
3具有四根推动杆,在缸体上呈正方形分布,其中在正方形上呈对角设置的两根推动杆为一组,分别设置在双向气缸3的缸体的两端上,所述连接部固定安装在推动杆上,所述夹持部上套接有摩擦板5,通过上述结构的设置,一方面可以有效的实现双向气缸3双向动作的效果,另一方面还可以利用斜对角交叉的方式,在实现了连接足够稳固的情况下,使得双向气缸具备更大的行程,以此能抓取更大的活动剪切盒和固定剪切盒了。
16.综上所述,本实施例的上料机械手结构,通过机械臂211和爪头212设置便可有效的实现构成抓取物料和部件的机械手结构,而通过将爪头212设置成爪杆2121、爪板2122、圆爪头2123和方爪头2124的方式,便可实现利用一个爪头212来抓取圆形的物料以及上不透水板和下不透水板以及抓取方形的活动剪切盒和固定剪切盒了。
17.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种土方直剪机的上料机械手结构,其特征在于:包括安装在外部机架上的机械臂(211)和安装在机械臂(211)上的爪头(212),所述爪头(212)包括爪杆(2121)、爪板(2122)、圆爪头(2123)和方爪头(2124),所述爪杆(2121)的上端与机械臂(211)连接,所述爪板(2122)安装在爪杆(2121)的下端上,所述爪板(2122)呈长条状设置,所述圆爪头(2123)安装在爪板(2122)的一端上,方爪头(2124)安装在爪板(2122)的另一端上,以抓取上不透水板和下不透水板以及物料和抓取活动剪切盒以及固定剪切盒。2.根据权利要求1所述的土方直剪机的上料机械手结构,其特征在于:所述圆爪头(2123)包括三爪气缸(1)和三根夹持杆(2),所述三爪气缸(1)的上端固定在爪板(2122)下侧面的一端上,所述夹持杆(2)均为l型杆,三根所述夹持杆(2)一一对应的安装在三爪气缸(1)的三个滑轨上,以在相邻的夹持杆(2)之间的构成用于容纳上不透水板和下不透水板以及物料的空间。3.根据权利要求2所述的土方直剪机的上料机械手结构,其特征在于:所述方爪头(2124)包括双向气缸(3)和两个方爪板(4),所述双向气缸(3)的缸体固定在爪板(2122)下侧面背向圆爪头(2123)的一端上,两个所述方爪板(4)分别固定在双向气缸(3)的两个推动杆上,以在两个方爪板(4)之间构成用于夹持活动剪切盒以及固定剪切盒的空间。4.根据权利要求3所述的土方直剪机的上料机械手结构,其特征在于:所述方爪板(4)包括连接部和夹持部,所述双向气缸(3)具有四根推动杆,在缸体上呈正方形分布,其中在正方形上呈对角设置的两根推动杆为一组,分别设置在双向气缸(3)的缸体的两端上,所述连接部固定安装在推动杆上,所述夹持部上套接有摩擦板(5)。
技术总结
本实用新型公开了一种土方直剪机的上料机械手结构,包括安装在外部机架上的机械臂和安装在机械臂上的爪头,所述爪头包括爪杆、爪板、圆爪头和方爪头,所述爪杆的上端与机械臂连接,所述爪板安装在爪杆的下端上,所述爪板呈长条状设置,所述圆爪头安装在爪板的一端上,方爪头安装在爪板的另一端上,以抓取上不透水板和下不透水板以及物料和抓取活动剪切盒以及固定剪切盒。本实用新型的土方直剪机的上料机械手结构,通过爪杆、爪板、圆爪头和方爪头的设置,便可有效的实现抓取圆形和方向的部件的效果。件的效果。件的效果。
技术研发人员:章干强 吕岳武
受保护的技术使用者:浙江聚新自动化设备有限公司
技术研发日:2021.06.09
技术公布日:2022/2/11