1.本发明涉及柔性机械臂技术领域,尤其涉及一种基于智能材料驱动的仿生柔性机械臂。
背景技术:
2.生活中有很多涉及狭窄、弯曲、受限的空间的工作不适合人们直接操作,机械臂是人们进行这类操作的常用工具。
3.一方面,刚性机械臂自动化控制度高,但是另一方面,由于目前所用的机械臂柔顺度、灵活度有限,难以便利且精确地定位到目标位置,使得这类操作的实际实施变得困难。柔性机械臂灵活性好、体积小、质量轻、环境适应性好、噪声低。因此,在需要柔顺度与灵活度的条件下柔性机械臂能够充分的完成自身的工作。
4.因此,本领域技术人员致力于开发一种柔性机械臂,以满足上述特殊环境下的特定需求。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是现有刚性机械臂结构复杂、灵活性差、容易发生刚性碰撞,难以应用于复杂未知环境和操控难问题。
6.为实现上述目的,本发明提供了一种基于智能材料驱动的仿生柔性机械臂,其特征在于,包括sma(形状记忆合金)弹簧、pcb板、铝合金板、球铰节点;所述pcb板与所述铝合金板固定连接;所述球铰节点的一端与所述铝合金板固定连接,另一端与另一个所述铝合金板固定连接;所述sma弹簧的的一端与所述pcb板相连接,另一端与另一个所述pcb板相连接;所述仿生柔性机械臂可以在所述sma弹簧驱动下在所述球铰节点处转动。
7.进一步地,所述sma弹簧适于被固定到不同的所述pcb板,从而决定所述仿生柔性机械臂的弯曲部位和可弯曲程度。
8.进一步地,所述铝合金板上设有pcb板连接孔和球铰节点连接孔,用于与所述pcb板和所述球铰节点相连接。
9.进一步地,所述铝合金板整体呈圆盘状,所述pcb板连接孔分为3组均匀布置于所述铝合金板的外边缘处;所述球铰节点连接孔位于所述铝合金板的中心处。
10.进一步地,每组所述pcb板连接孔的数目为3个。
11.进一步地,所述pcb板整体呈圆盘状,所述pcb板上设有中心孔、铝合金板连接孔和sma弹簧连接孔,用于与所述铝合金板和所述sma弹簧相连接。
12.进一步地,所述中心孔位于所述pcb板的中心处,所述铝合金板连接孔与所述pcb板连接孔相配合,所述sma弹簧连接孔分为3组均匀布置于所述pcb板的外边缘处。
13.进一步地,每组所述sma弹簧连接孔的数目为4个。
14.进一步地,单节所述仿生柔性机械臂有六根sma弹簧呈八面体布置,从而决定所述仿生柔性机械臂能够三个方向转动。
15.进一步地,所述pcb板与所述铝合金板通过螺栓固定连接;所述铝合金板与所述球铰节点通过螺栓固定连接;所述sma弹簧与所述pcb板通过螺栓相连接。
16.进一步地,所述pcb板简化了所述sma弹簧连接孔的布置,4个所述sma弹簧连接孔靠外边2个与上边2个所述sma弹簧相连接,靠里边2个所述sma弹簧连接孔与下边2个所述sma弹簧相连接。
17.进一步地,所述sma弹簧是tini基sma弹簧,其弹簧丝直径为0.51mm,弹簧的中径为3.45mm。
18.与传统方法和装置相比,本发明具备以下有益效果:
19.本发明扩大了薄膜试件在整体结构尺寸占比,本发明具有多个可调控的转动自由度,与现有技术相比具有更好的灵活度和柔顺性,可以更加快速、便捷、精准地将端部定位到需要操作的目标位置。
20.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
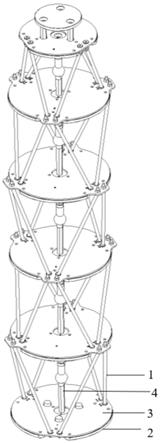
21.图1是本发明一个较佳实施例的仿生柔性机械臂三维示意图;
22.图2是本发明一个较佳实施例的sma弹簧示意图;
23.图3是本发明一个较佳实施例的铝合金板俯视图;
24.图4是本发明一个较佳实施例的pcb板俯视图;
25.图5是本发明一个较佳实施例的球铰节点示意图。
26.其中,1-sma弹簧,2-铝合金板,3-pcb板,4-球铰节点,201-铝合金主平台,202-pcb板连接孔,203-球铰节点连接孔,301-pcb板主平台,302-铝合金板连接孔,303-sma弹簧连接孔,304-中心孔,401-球铰,402-连杆。
具体实施方式
27.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
28.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.如图1所示,本发明一个较佳实施例的基于智能材料驱动的仿生柔性机械臂,包括sma弹簧1,铝合金板2,pcb板3,球铰节点4。
31.如图2所示,sma弹簧1的三维图。
32.如图3所示,铝合金板2包括铝合金主平台201、pcb板连接孔202、球铰节点连接孔
203。
33.其中铝合金主平台201为主体结构,整体呈圆盘状,铝合金主平台201上设有pcb板连接孔202和球铰节点连接孔203。pcb板连接孔202分为3组均匀布置于铝合金主平台201的外边缘处,每1组pcb板连接孔202的数目为3个,球铰节点连接孔203位于铝合金主平台201的中心处。通过螺栓在pcb连接孔202处将铝合金主平台201和pcb板主平台301固定连接,通过螺栓在球铰节点连接孔203处将铝合金主平台201与球铰节点4固定连接。
34.如图4所示,pcb板3包括pcb板主平台301、铝合金板连接孔302、sma弹簧连接孔303和中心孔304。
35.其中,pcb板主平台301为主体结构,整体呈圆盘状,pcb板主平台301上设有铝合金板连接孔302、sma弹簧连接孔303和中心孔304。中心孔304位于pcb板主平台301的中心处,铝合金板连接孔302与pcb板连接孔202相配合,sma弹簧连接孔303分为3组均匀布置于pcb板主平台301的外边缘处,每1组sma弹簧连接孔303的数目为4个。通过螺栓在铝合金板连接孔302处将铝合金主平台201和pcb板主平台301固定连接,通过螺栓在sma弹簧连接孔303处将pcb板主平台301与sma弹簧1相连接,通过螺栓在中心孔304处将铝合金主平台201、pcb板主平台301共通与球铰节点4固定连接。
36.如图5所示,球铰节点4包括球铰401和连杆402。其中,球铰401能绕任意方向转动,连杆402连接球铰401和铝合金板2、pcb板3。
37.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。