1.本实用新型涉及机器人设备技术领域,具体涉及一种智能机器人视觉导航装置。
背景技术:
2.随着图像处理技术以及摄像机硬件的快速发展,视觉导航装置已广泛应用到智能机器人领域中,依靠视觉所提供的实时信息可以与惯性导航和gps信息进行融介,提高了导航精度。其次,摄像机更善于捕捉运动信息,传统的传感器则较吃力,从应用的角度来看,视觉信号的抗十扰性能很好,而无线电和gps信号易受阻塞。目前现有的智能机器人上的视觉导航装置主要有两个不方便的地方,一是视觉导航装置无法调整,只能通过机器人转动带动其转动,在一些狭窄的地方容易影响正常使用,另一方面,机器人上有气动的连接件,这些连接件被导管悬在空中,没有地方固定,容易晃动,导致非常凌乱,不利于检修维护。
技术实现要素:
3.有鉴于此,本实用新型提供一种智能机器人视觉导航装置,不仅转动灵活、反应快,而且可以固定外部的一些气动连接件,使整体保持整齐。(效果)
4.为解决上述技术问题,本实用新型提供一种智能机器人视觉导航装置,包括与外部底座转动连接的底板,所述底板上表面一侧固定安装有形状为l形的支撑板,所述支撑板顶端固定安装有形状为l形的连接板,所述连接板上端固定安装有视觉传感装置。
5.进一步的,所述底板上固定连接有底盘,所述底盘上表面中央位置固定安装有连接轴,所述连接轴顶部转动连接有补光灯。
6.进一步的,所述连接轴中间位置铰接有电动伸缩杆,所述电动伸缩杆另一端与补光灯铰接。
7.进一步的,所述支撑板的竖直段为梯形。
8.进一步的,所述连接板上开设有盲孔。
9.本实用新型的上述技术方案的有益效果如下:
10.1、本实用新型的底板与机器人的底座转动连接,外部的伺服电机与底板传动连接后,可驱动底板转动,进而带动视觉传感装置和补光灯转动,方便灵活,反应速度快,且精度高;
11.2、通过设置l型的支撑板和连接板,凸出一个固定气动连接件的平台,整体结构合理,使机器人整体排布较为整齐,方便检修,同时避免气动连接件晃动产生密封性问题,降低了故障率。
附图说明
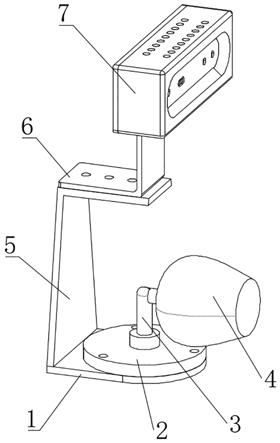
12.图1为本实用新型智能机器人视觉导航装置的结构示意图。
13.1、底板;2、底盘;3、连接轴;4、补光灯;5、支撑板;6、连接板;7、视觉传感装置。
具体实施方式
14.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图1,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
15.如图1所示:一种智能机器人视觉导航装置,包括与外部底座转动连接的底板1,底板1上表面一侧固定安装有形状为l形的支撑板5,支撑板5用于固定连接板6,支撑板5顶端固定安装有形状为l形的连接板6,连接板6用于固定视觉传感装置7,连接板6上端固定安装有视觉传感装置7,视觉传感装置7包括摄像头和传感器,用于采集图像及数据并传输给控制装置,视觉传感装置7为现有技术,且并未作出改进,在此不作详细描述。
16.根据本实用新型的一个实施例,如图1所示,
17.底板1上固定连接有底盘2,底盘2上表面中央位置固定安装有连接轴3,连接轴3顶部转动连接有补光灯4,补光灯4用于补充光源,便于机器人在黑暗环境中作业。
18.根据本实用新型的一个实施例,如图1所示,
19.连接轴3中间位置铰接有电动伸缩杆,电动伸缩杆另一端与补光灯4铰接,通过电动伸缩杆的伸缩,调整补光灯4的光照角度,有利于视觉传感装置7的摄像头采集图像。
20.根据本实用新型的一个实施例,如图1所示,
21.支撑板5的竖直段为梯形,下宽上窄的结构使支撑板5的稳定性更好。
22.根据本实用新型的一个实施例,如图1所示,
23.连接板6上开设有盲孔,外部的气动连接件的固定方式一般有两种,一是采用橡胶块或塑料块,将其卡入连接板6的盲孔上,将外部的气动连接件固定在橡胶块或塑料块上,另一种为直接将气动连接件通过螺钉固定在连接板6上。
24.本实用新型的工作方法(或工作原理):
25.使用时,将外部的气动连接件通过螺钉或其他方式固定在连接板6上,防止在行进中气动连接件频繁晃动,底板1与底座内的伺服电机通过齿轮或联轴器连接,在收到指令后,通过控制伺服电机驱动视觉传感装置7及补光灯4调整角度。
26.在本实用新型中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
27.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种智能机器人视觉导航装置,其特征在于:包括与外部底座转动连接的底板(1),所述底板(1)上表面一侧固定安装有形状为l形的支撑板(5),所述支撑板(5)顶端固定安装有形状为l形的连接板(6),所述连接板(6)上端固定安装有视觉传感装置(7)。2.如权利要求1所述的智能机器人视觉导航装置,其特征在于:所述底板(1)上固定连接有底盘(2),所述底盘(2)上表面中央位置固定安装有连接轴(3),所述连接轴(3)顶部转动连接有补光灯(4)。3.如权利要求2所述的智能机器人视觉导航装置,其特征在于:所述连接轴(3)中间位置铰接有电动伸缩杆,所述电动伸缩杆另一端与补光灯(4)铰接。4.如权利要求1所述的智能机器人视觉导航装置,其特征在于:所述支撑板(5)的竖直段为梯形。5.如权利要求1所述的智能机器人视觉导航装置,其特征在于:所述连接板(6)上开设有盲孔。
技术总结
本实用新型提供一种智能机器人视觉导航装置,属于机器人技术领域,包括与外部底座转动连接的底板,所述底板上表面一侧固定安装有形状为L形的支撑板,所述支撑板顶端固定安装有形状为L形的连接板,所述连接板上端固定安装有视觉传感装置;本实用新型的底板与机器人的底座转动连接,外部的伺服电机与底板传动连接后,可驱动底板转动,进而带动视觉传感装置和补光灯转动,方便灵活,反应速度快,且精度高;通过设置L型的支撑板和连接板,凸出一个固定气动连接件的平台,整体结构合理,使机器人整体排布较为整齐,方便检修,同时避免气动连接件晃动产生密封性问题,降低了故障率。降低了故障率。降低了故障率。
技术研发人员:胡英才 冯兴 李冰
受保护的技术使用者:河南固睿智能科技有限公司
技术研发日:2021.05.31
技术公布日:2022/1/21