1.本发明涉及核处理操作领域,具体涉及一种分体式机械手的穿墙连接装置及包含其的机械手。
背景技术:
2.主从机械手主要用途是在热室内对燃料组件及元件等放射性材料进行非破坏性检查、解体切割、工艺运输等远距离操作。机械手从动端放在热室壳体内,主动端在热室前区,通过人员的操作对辐照后物品进行辅助控制,是操作和处理放射性有害物质最理想工具之一。
3.目前,核动力研究设计院一所主从机械手均为第二代产品(仿欧),已陆续装备使用了二十多年,而且大部分为中型整体式结构。该型号机械手操作范围及负载能力虽然基本满足一般性工作需求,但其后续维护、检修和堵断密封均不理想,容易造成核污染,其设计理念已不适合现在需求。
技术实现要素:
4.本发明所要解决的技术问题是现阶段的机械手容易造成环境污染,增加操作人员的放射性颗粒吸入风险,目的在于提供一种分体式机械手的穿墙连接装置及包含其的机械手,解决了分体式机械手的密封防护和维修更换的问题。
5.本发明通过下述技术方案实现:
6.一种分体式机械手的穿墙连接装置,包括:
7.穿墙管,其水平设置在墙体内,且连通所述墙体的两侧;
8.穿墙连接件,其具有第一端和第二端,所述穿墙连接件同轴设置在所述穿墙管内,且所述穿墙连接件的外侧面与所述穿墙管的内侧面动密封连接;
9.传动连接架,两个所述传动连接架分别与所述穿墙连接件的第一端和第二端固定连接,且用于与从动臂和主动臂连接;
10.所述传动连接架包括:
11.第一连接部,其具有第一端和第二端,所述第一连接部的第一端与所述穿墙连接件同轴且固定连接,所述第一连接部的第二端设置有外螺栓孔;
12.第二连接部,其具有第一端和第二端,所述第二连接部的第一端与所述从动臂/所述主动臂固定连接,所述第二连接部的第二端设置有与所述外螺栓孔同轴的内螺栓孔;
13.紧固螺栓,其穿过所述外螺栓孔和所述内螺栓孔并将所述第一连接部和所述第二连接部连接。
14.优选地,所述第一连接部的第二端的直径大于所述第二连接部的第二端的直径,所述第二连接部的第二端同轴设置在所述第一连接部内。
15.具体地,所述穿墙连接件包括:
16.水平管,其同轴设置在所述穿墙管内,且所述水平管的两端分别与两个所述第一
连接部的第一端同轴固定连接;
17.转动组件,其设置在所述水平管的外侧面与所述穿墙管的内侧面之间;
18.传动组件,其设置在所述水平管内,且所述传动组件的两端分别与所述从动臂内的齿轮组和所述主动臂内的齿轮组动力连接。
19.具体地,所述传动组件包括:
20.至少一个钢带,其两端分别与所述从动臂内的齿轮组的转矩输入轴和所述主动臂内的齿轮组的转矩输出轴连接;
21.至少一个密封隔板,其竖直设置在所述水平管内,且所述密封隔板的外圆周面与所述水平管的内侧面密封固定连接,所述密封隔板上设置有多个与所述钢带适配的水平横槽,所述钢带与所述密封隔板垂直设置且穿过所述水平横槽。
22.进一步,所述水平横槽的内侧面设置有密封橡胶层。
23.具体地,所述转动组件包括:
24.滚动支撑座,其内环与所述水平管的外侧面同轴且固定连接,所述滚动支撑座的外环与所述穿墙管的内侧面同轴且连接,所述滚动支撑座的内环与外环轴向固定连接,且可沿其中轴线相对转动;
25.密封支座,其内环面与所述水平管的外侧面同轴密封连接,所述密封支座的外环面与所述穿墙管的内侧面同轴动密封连接。
26.优选地,所述滚动支撑座的数量至少为两个,其中两个所述滚动支撑座分别设置在所述水平管的两端;
27.所述密封支座的数量至少为两个,其中两个所述密封支座分别设置在所述水平管的两端面与位于所述水平管的两端的两个所述滚动支撑座之间。
28.进一步,所述水平管的两端与所述穿墙管的两端之间设置有油脂密封层。
29.作为一个实施例,所述滚动支撑座为滚珠轴承。
30.一种分体式机械手,包括:
31.上述的一种分体式机械手的穿墙连接装置,其设置在热室与热室前区之间的墙体内;
32.从动臂,其位于所述热室内,且与所述穿墙连接装置的一端可拆卸连接;
33.主动臂,其位于所述热室前区,且与所述穿墙连接装置的另一端可拆卸连接。
34.本发明与现有技术相比,具有如下的优点和有益效果:
35.本发明中的穿墙连接装置具备可快速拆卸的传动连接架,使其可以在需要对机械手进行维修时,可以按照需要快速的对主动臂或者从动臂进行拆卸;同时本发明中的穿墙连接件具备自密封防护功能,能有效防止放射性物质通过机械手弥散至环境,阻断热室内放射性颗粒通过机械手弥散至前区的路径,解决现有维护、检修和堵断密封不理想等问题。
附图说明
36.附图示出了本发明的示例性实施方式,并与其说明一起用于解释本发明的原理,其中包括了这些附图以提供对本发明的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分,并不构成对本发明实施例的限定。
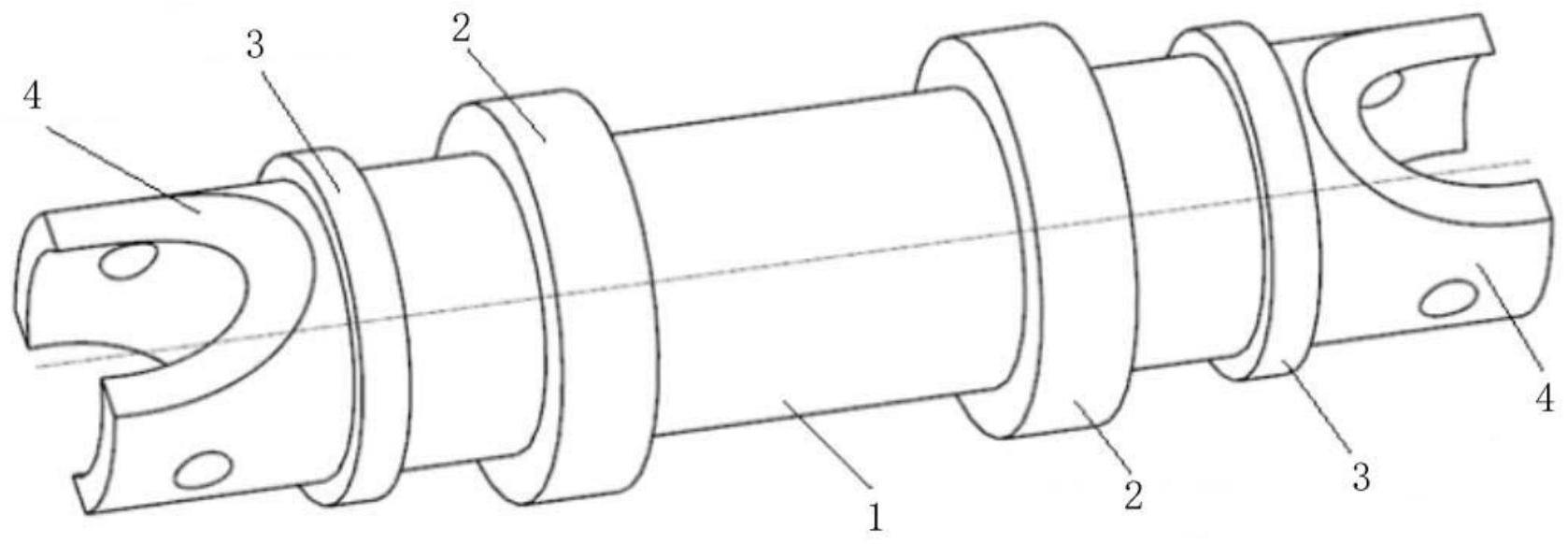
37.图1是根据本发明所述的一种分体式机械手的穿墙连接装置的结构示意图。
38.图2是根据本发明所述的密封隔板的结构示意图。
39.图3是根据本发明所述的一种分体式机械手的结构示意图。
40.附图标记:1-水平管,2-滚动支撑座,3-密封支座,4-第一连接部,5-密封隔板,6-水平横槽,7-穿墙管,8-穿墙连接件,10-穿墙连接装置,20-从动臂,30-主动臂。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图和实施方式对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本发明的限定。
42.另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分。
43.在不冲突的情况下,本发明中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本发明。
44.现有的机械手发生故障需从热室拔出检修时,存在放射性颗粒随机械手从动端(即从动臂20端)带至热室前区造成环境污染的风险,而机械手自身的密封防护问题,也导致热室内弥散在空气中的放射性粉尘可能会因温度、压力的变化而沿机械手钢丝绳(现阶段的机械手主动臂30与从动臂20之间的部分传动采用钢丝绳传动,本领域技术人员能够知晓)传动孔道扩散至前区,造成前区污染,增加人员吸入放射性颗粒的风险。
45.实施例一
46.本实施例为了解决上述存在的问题,设计一种带有自密封防护功能的穿墙装置,阻断热室内放射性颗粒通过机械手弥散至前区的路径。
47.一种分体式机械手的穿墙连接装置10,包括穿墙管7、穿墙连接件8和传动连接架。
48.穿墙管7水平设置在墙体内,且连通墙体的两侧,穿墙管7与墙体之间的空间安装有铅环密封,将墙体的两侧隔离开,本实施例中墙体的两侧分别为热室前区和热室,且在穿墙管7的两端利用至少8个压缩螺钉将其密封在墙体上,避免出现核辐射泄露的问题。
49.穿墙连接件8具有第一端和第二端,穿墙连接件8同轴设置在穿墙管7内,且穿墙连接件8的外侧面与穿墙管7的内侧面动密封连接;穿墙连接件8设置在穿墙管7内,且可以相对穿墙管7进行转动,从而可以实现在第二端转动穿墙连接件8带动穿墙连接件8的第一端转动。
50.两个传动连接架分别与穿墙连接件8的第一端和第二端固定连接,且用于与从动臂20和主动臂30连接;通过传动连接架和穿墙连接件8将主动臂30和从动臂20连接,实现在主动臂30上控制从动臂20的目的。
51.本实施例中解决的问题是:现阶段如果主动臂30出现故障需要检修,可能需要将穿墙连接件8抽出,可能会存在放射性颗粒随机械手从动端带至热室前区造成环境污染的风险。
52.本实施例中的传动连接架包括第一连接部4、第二连接部和紧固螺栓。
53.第一连接部4具有第一端和第二端,第二连接部具有第一端和第二端。
54.第一连接部4的第一端与穿墙连接件8同轴且固定连接,第一连接部4的第二端设置有外螺栓孔;
55.位于热室内的第二连接部的第一端与从动臂20固定连接,第二连接部的第二端设
置有与外螺栓孔同轴的内螺栓孔;
56.安装从动臂20时,将紧固螺栓穿过外螺栓孔和内螺栓孔,并将第一连接部4和第二连接部固定连接,从而实现了穿墙连接件8与从动臂20的连接。
57.在需要进行拆卸时,将紧固螺钉从外螺栓孔和内螺栓孔处拆除,将第一连接部4和第二连接部分离,从而实现了将从动臂20从穿墙连接件8上拆除。
58.位于热室前区的第二连接部的第一端与主动臂30固定连接,第二连接部的第二端设置有与外螺栓孔同轴的内螺栓孔;
59.安装主动臂30时,将紧固螺栓穿过外螺栓孔和内螺栓孔,并将第一连接部4和第二连接部固定连接,从而实现了穿墙连接件8与主动臂30的连接。
60.在需要进行拆卸时,将紧固螺钉从外螺栓孔和内螺栓孔处拆除,将第一连接部4和第二连接部分离,从而实现了将主动臂30从穿墙连接件8上拆除。
61.三者都可作为单体分离与合并,某一个部件有故障时,可以松开彼此传动连接架,很快将其脱离,装上备用的部件,特别是对有故障须维修的从动臂20可在热室的操作区脱开,利用热室吊车,从热室顶部的检修孔将从动臂20吊出,不会污染操作区。
62.第一连接部4和第二连接部有至少两种连接方法,其如下:
63.方法
①
64.第一连接部4的第二端的直径大于第二连接部的第二端的直径,第二连接部的第二端同轴设置在第一连接部4内。
65.方法
②
66.第一连接部4的第二端的直径小于第二连接部的第二端的直径,第二连接部的第二端同轴设置在第一连接部4外。
67.实施例二
68.上述实施例解决了拆卸时候可能出现的放射性颗粒泄露问题,本实施例解决的技术问题是:穿墙连接件8自身的密封防护问题,也导致热室内弥散在空气中的放射性粉尘可能会因温度、压力的变化而沿穿墙密封件扩散至前区,造成前区污染,增加人员吸入放射性颗粒的风险
69.本实施例中的穿墙连接件8包括水平管1、传动组件和传动组件。
70.水平管1同轴设置在穿墙管7内,且水平管1的两端分别与两个第一连接部4的第一端同轴固定连接;转动组件设置在水平管1的外侧面与穿墙管7的内侧面之间;
71.通过传动组件将水平管1和穿墙管7连接,使得水平管1可以与穿墙管7产生相对转动,不影响机械手的操作。
72.传动组件设置在水平管1内,且传动组件的两端分别与从动臂20内的齿轮组和主动臂30内的齿轮组动力连接,现阶段的传动组件多采用钢丝绳传动,因为钢丝绳较细,设置在水平管1内钢丝绳即使周围有密封橡胶,在传动的过程中也容易对密封橡胶造成损坏,并导致热室内弥散在空气中的放射性粉尘可能会因温度、压力的变化而沿机械手钢丝绳传动孔道扩散至前区,造成前区污染,增加人员吸入放射性颗粒的风险。
73.因此本实施例中的传动组件包括钢带和密封隔板5。
74.至少一个钢带的两端分别与从动臂20内的齿轮组的转矩输入轴和主动臂30内的齿轮组的转矩输出轴连接;
75.至少一个密封隔板5竖直设置在水平管1内,且密封隔板5的外圆周面与水平管1的内侧面密封固定连接,密封隔板5上设置有多个与钢带适配的水平横槽6,钢带与密封隔板5垂直设置且穿过水平横槽6,水平横槽6的内侧面设置有密封橡胶层。
76.水平管1的两端与穿墙管7的两端之间设置有油脂密封层。
77.钢带和齿轮组配合安装使用,作为力传递的介质,改变原钢丝绳直线传动方式,增加水平管1内的空间占有率,减小水平管1中的空隙,降低放射性颗粒沿机械手钢丝绳传动孔道扩散至前区的速率。
78.水平管1中间设置密封隔板5,密封隔板5进一步对放射性颗粒进行阻隔;钢带从密封隔板5上的水平横槽6穿过,连接密封隔板5两侧的传动齿轮组,水平横槽6与钢带之间的接触面积增加,并在水平横槽6内设置密封橡胶层,可以减缓钢带对密封橡胶层的破坏,从而可以增加穿墙连接件8的自密封性。
79.最后水平管1两端再采用油脂密封进一步增加密封性。这种结构形式的密封等级可以达到2级甚至1级密封,且具有自密封装置并易于更换,自密封材料选用耐辐照、耐腐蚀,易于后处理。
80.同时,通过钢带传动,其使得负载能力提升,最终可以在任何位置最大无损伤负载提升操作能力达到12kg及以上。
81.实施例三
82.完善了传动组件的自密封性能,因为水平管1和穿墙管7之间还存在转动,即存在间隙,则也可能出现放射性颗粒泄露的问题,因此本实施例提供一种转动组件,包括滚动支撑座2和密封支座3。
83.本实施例中的滚动支撑座2采用滚珠轴承,也可以采用其它类似的装置,滚动支撑座2的内环与水平管1的外侧面同轴且固定连接,滚动支撑座2的外环与穿墙管7的内侧面同轴且连接,滚动支撑座2的内环与外环轴向固定连接,且可沿其中轴线相对转动;
84.通过滚珠轴承实现水平管1和穿墙管7的可转动连接,且不易在轴向方式相对移动。
85.密封支座3内环面与水平管1的外侧面同轴密封连接,密封支座3的外环面与穿墙管7的内侧面同轴动密封连接。
86.密封支座3即起到支撑的作用,又起到了密封的作用,因此滚动支撑座2的数量至少为两个,密封支座3的数量至少为两个,本实施例中以两个为例,如图所示,两个滚动支撑座2分别设置在水平管1的两端;两个密封支座3分别设置在水平管1的两端面与两个滚动支撑座2之间。
87.密封支座32个,分别穿插安装在水平管1两端,作为水平管1在穿墙管7套管的支撑,并提供密封作用;滚动支撑座22个,穿插安装在水平管1中间部位,作为水平管1在穿墙管7套管的支撑,为主从机械手的转摆动作提供便利。
88.实施例四
89.结合了上述实施例一、实施例二和实施例三,本实施例提供一种分体式机械手,包括穿墙连接装置10、从动臂20和主动臂30。
90.穿墙连接装置10设置在热室与热室前区之间的墙体内,穿墙管7热端零件由不锈钢制造,冷端由碳钢制造。
91.从动臂20位于热室内,且与穿墙连接装置10的一端可拆卸连接;从动臂20由从动联接架、内、中、外同心伸缩管组成,从动臂20结构零件由不锈钢和铝合金制造,从动臂20滚动轴承由不锈钢制造;
92.主动臂30位于热室前区,且与穿墙连接装置10的另一端可拆卸连接。主动臂30有联接装置、内外同心伸缩管组成,主动臂30结构零件由碳钢和铝合金制造,主动臂30滚动轴承由碳钢制造,碳钢零件表面进行镀锌钝化处理或发黑处理,所有铝制零件表面进行阳极氧化处理;
93.主动臂30、从动臂20和穿墙连接装置10三大独立模块,主动臂30与穿墙连接装置10可拆卸连接,穿墙连接装置10与从动臂20可拆卸连接,三者都可作为单体分离与合并,能够快速安装和拆卸,有利于检修及更换。
94.另外,机械手还包括有电气系统。
95.电气系统由电源盒、电机、连接电缆及控制盒等部分组成,其结构为:电源盒为整个电气系统提供能量,作为单体设置;电机安装在主动臂30上端,为机械手方向运动及提升提供执行动力;控制盒安装在操纵把手上,控制电机启停;连接电缆通过快速插接口来连接各执行机构,作为各执行机构信号传导的媒介。
96.电气系统主要功能在于:通过操纵把手控制盒上的各方向按钮来选择我们所期望的调整动作,并控制电机驱动使其向各个方向作规定的运动且速度可调,以扩展机械手的可操作区域,满足机械手的动作需要。
97.其中,驱动电机有x、y、z方向:机械手与一般传统的主从机械手一样具有七个独立动作,在操作把手上设置与控制盒,通过操纵把手控制盒上的各方向(x、y、z)按钮来选择我们所期望的调整动作(左右、前后、上下),并控制电机驱动使其向各个方向作规定的运动且速度可调;当主从机械手达到机械限位时,可通过电动控制增加机械手操作范围,以此扩展机械手的可操作区域,满足机械手的动作需要。
98.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
99.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
100.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本发明,而并非是对本发明的范围进行限定。对于所属领域的技术人员而言,在上述发明的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本发明的范围内。