1.本实用新型涉及一种主端触觉反馈装置,更具体的说,本实用新型涉及一种主从式血管介入手术机器人的主端触觉反馈装置。
背景技术:
2.血管类疾病是一种主要发生于动脉、静脉和淋巴管的疾病,是对人类身体健康威胁最大的疾病之一。为了更好地对血管类疾病患者进行医疗救治,医生常利用现代高科技手段进行一种微创性治疗,即血管介入手术治疗,不需要对患者器官进行开刀,具有创伤小、出血少、并发症少以及术后恢复快等优点。鉴于血管介入手术的特殊性,手术医生要在病人血管内完成治疗有着很大的难度,不仅手术医生需要具备丰富的专业知识技能,还需要同步应用于血管介入手术中的先进医疗设备作为医疗救治的可靠工具。在传统血管介入手术中,使用对应传感器来捕获工具-组织的相互作用力时,外科医生必须实时监控力的趋势和数值,以确定血管壁和手术导丝之间是否发生了碰撞,医生在操作过程一直保持注意力集中易感到疲劳,易使导丝刺破血管壁从而破坏血管,增大手术风险性。此外,医生在进行血管介入手术时很难通过手部感知到导丝碰触血管壁所产生的微弱阻力,不易感受到直观的触觉力反馈,不易根据手术经验控制导丝前进或调整其推进角度。
技术实现要素:
3.本实用新型的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
4.为了实现根据本实用新型的这些目的和其它优点,提供了一种主从式血管介入手术机器人的主端触觉反馈装置,包括:
5.工作缸体,其为空筒状,所述工作缸体的内部固定连接有磁流变液缸体,所述磁流变液缸体的外部上下对称设置有励磁线圈,所述磁流变液缸体的内部设置有磁流变液;
6.缸体密封螺纹端盖,其设置为规格相同的两个缸体密封螺纹端盖,所述两个缸体密封螺纹端盖分别连接在所述工作缸体的两端;
7.手术操作杆轴,其贯通所述缸体密封螺纹端盖和所述磁流变液缸体的中心位置进行套设连接。
8.优选的是,其中,还包括:海绵圈,其设置为规格相同的两个海绵圈,所述两个海绵圈分别设置在所述磁流变液缸体与所述两个缸体密封螺纹端盖之间,所述海绵圈的外圈与所述工作缸体的内壁贴合,所述海绵圈的内圈与所述手术操作杆轴套设连接;所述海绵圈的上下两端均镶嵌有永久磁铁。
9.优选的是,其中,所述海绵圈的上下两端镶嵌永久磁铁的方式为:所述海绵圈的上下两端均设置有凹槽,所述凹槽的直径略小于所述永久磁铁的直径,所述永久磁铁镶嵌于所述凹槽内。
10.优选的是,其中,所述磁流变液缸体设置有与所述工作缸体贯通的注液孔,所述注
液孔设置有密封盖。
11.优选的是,其中,所述工作缸体的周壁对应所述励磁线圈的位置对称设置有两个通电接线孔。
12.优选的是,其中,所述手术操作杆轴的直径为12mm,所述海绵圈的内圈直径为12.1mm,所述磁流变液缸体与所述手术操作杆轴套设连接处的直径为12.4mm。
13.本实用新型至少包括以下有益效果:
14.其一,应用于血管介入手术中,医生控制手术操作杆轴在主端触觉反馈装置中进退,主端触觉反馈装置能够在导丝与血管壁之间产生相互作用力时通过主从式血管介入手术机器人来控制阻尼力的产生,并反馈给医生一个可感知的触觉力,使医生得知当前手术推进过程中导丝与血管壁之间的碰撞力有破坏血管的风险,需停止前进或调整导丝推进角度后继续进行手术,实现导丝与血管壁之间碰撞力的安全提示,实现手部临场操作感,提高手术安全性。
15.其二,能够解决磁流变液的漏液问题,手术操作杆轴直接与海绵圈接触,虽然磁流变液缸体的第一连接孔直径略大于手术操作杆轴的直径,但由于磁流变液的组成成分包含磁性颗粒,即使有少量的磁流变液通过第一连接孔溢出磁流变液缸体,工作缸体中两侧的海绵也会将工作时手术操作杆轴上依附的少许磁流变液吸附,从而防止磁流变液溢出至工作缸体外。
16.其三,能够有效减小主端触觉反馈装置结构设计中自身部件之间所产生的摩擦力对阻尼功能实现的影响。主端触觉反馈装置的手术操作杆轴分别与海绵圈和缸体密封螺纹端盖之间存在一定间隙(手术操作杆轴的直径为 12mm,海绵圈的内圈直径为12.1mm,缸体密封螺纹端盖的第二连接孔直径为12.4mm),这保证了手术操作杆轴与工作缸体之间不会产生摩擦力。
17.其四,通过设置的注液孔方便磁流变液的注入与倒出。
18.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明:
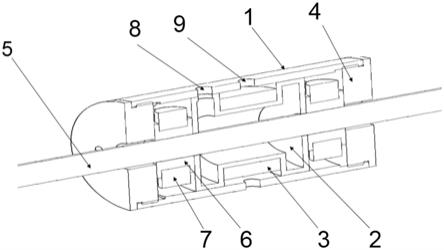
19.图1为本实用新型的截面结构示意图。
20.图2为本实用新型的立体结构示意图。
具体实施方式:
21.下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
22.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
23.需要说明的是,在本实用新型的描述中,术语指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对
重要性。
24.在本实用新型的描述中,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
25.此外,在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
26.图1示出了本实用新型的一种具体实现方式,包括:
27.工作缸体1,其为空筒状,所述工作缸体1的内部固定连接有磁流变液缸体2,所述磁流变液缸体2的外部上下对称设置有励磁线圈3,所述磁流变液缸体2内部设置有磁流变液;该工作缸体的作用是通过励磁线圈控制磁流变液缸体内磁流变液的粘度。
28.缸体密封螺纹端盖4,其设置为规格相同的两个缸体密封螺纹端盖4,所述两个缸体密封螺纹端盖4分别连接在所述工作缸体1的两端。该缸体密封螺纹端盖的作用是密封工作缸体的两端。
29.手术操作杆轴5,其贯通所述缸体密封螺纹端盖4和所述磁流变液缸体2 的中心位置进行套设连接。该手术操作杆轴的作用是在工作缸体中做工,当磁流变液的粘度提高时为医生反馈可感知的触觉力。
30.在这种技术方案中,医生通过主端触觉反馈装置控制主从式血管介入手术机器人进行手术,当手术中导丝触碰到血管壁时,主从式血管介入手术机器人的主端触觉反馈装置为医生反馈可感知的触觉力。工作原理:医生通过手术操作杆轴5操控主从式血管介入手术机器人进行手术,当手术中导丝触碰到血管壁时,主从式血管介入手术机器人反馈电流信号使得励磁线圈3通电产生磁场。磁流变液缸体2中的磁流变液在励磁线圈3的磁场作用下粘度提高,从而通过手术操作杆轴5与磁流变液之间产生的阻尼,为医生反馈可感知的触觉力。
31.在另一种实例中,还包括:海绵圈6,其设置为规格相同的两个海绵圈6,所述两个海绵圈6分别设置在所述磁流变液缸体2与所述两个缸体密封螺纹端盖4之间,所述海绵圈6的外圈与所述工作缸体1的内壁贴合,所述海绵圈6的内圈与所述手术操作杆轴5套设连接;所述海绵圈6的上下两端均镶嵌有永久磁铁7。采用这种方案具有防止磁流变液溢出的有利之处。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需求进行适当的替换和/或修改。
32.如上述方案中,所述海绵圈6的上下两端镶嵌永久磁铁7的方式为:所述海绵圈6的上下两端均设置有凹槽,所述凹槽的直径略小于所述永久磁铁 7的直径,所述永久磁铁7镶嵌于所述凹槽内。采用这种方案具有利用海绵的韧性固定永久磁铁的有利之处。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需
求进行适当的替换和/或修改。
33.如上述方案中,所述磁流变液缸2设置有与所述工作缸体1贯通的注液孔8,所述注液孔8设置有密封盖。采用这种方案具有方便磁流变液注入与倒出的有利之处。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需求进行适当的替换和/或修改。
34.如上述方案中,所述工作缸体1的周壁对应所述励磁线圈3的位置对称设置有两个通电接线孔9。采用这种方案具有便于励磁线圈接线的有利之处。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需求进行适当的替换和/或修改。
35.如上述方案中,所述手术操作杆轴5的直径为12mm,所述海绵圈6的内圈直径为12.1mm,所述磁流变液缸体与所述手术操作杆轴套设连接处的直径为12.4mm。采用这种方案具有减小与自身部件之间的摩擦力,提高可感知触觉力精确度的有利之处。并且,这种方式只是一种较佳实例的说明,但并不局限于此。在实施本实用新型时,可以根据使用者需求进行适当的替换和/ 或修改。
36.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。