1.本发明涉及神经肌肉康复及运动训练技术领域,尤其是涉及一种局部振动康复训练设 备。
背景技术:
2.人体的皮肤、肌肉等富含有丰富的感受器,能够感受到外部的各种刺激,如表2所 示。根据它们分布的位置,会发现振动刺激不同的感受器会达到不同的效果。例如, 40~300hz局部振动刺激分布在皮下组织韧带和关节囊的pacinian小体,会有效地改善 人体关节炎、神经肌肉痛和术后跟腱韧带等的恢复;50~120hz局部振动刺激分布在肌肉、 肌腱和关节等处的肌梭感受器,能够提高神经系统损伤患者和老年人的感觉运动功能等。
3.局部肌肉振动刺激作为一种常见的物理刺激,现已广泛地应用在体育运动训练、神 经系统疾病的感觉运动功能改善等方面,例如如下表所示,振动的选择以及刺激的位置 可以根据下表来确定。
[0004][0005]
此外,皮肤肌肉对振动的敏感性取决于振动位置、振动幅度、振动频率、振动时间 以及受试者性别、年龄、皮肤状况等。
[0006]
到目前为止,国内涌现出来的局部振动设备很多,根据不同的驱动方式可以分为: 电磁驱动、超声驱动、偏心电机驱动等。但是这些设备拥有一些不足,例如振动幅值大 但频率调节有限,频率调节范围大但振幅小,或应用有限只能针对身体特定区域进行刺 激。
技术实现要素:
[0007]
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的
在 于提出一种局部振动康复训练设备,用于神经康复及运动训练,且能够根据作用对象的 症状和病灶点,施加不同参数的振动刺激,以达到合适的治疗效果。
[0008]
根据本发明实施例的局部振动康复训练设备,包括:
[0009]
振动子,所述振动子包括振动腔体和振动膜,所述振动腔体和所述振动膜密封连接 并共同限定出气室;所述振动膜用于与人体局部部位接触;
[0010]
气动回路系统,所述气动回路系统与所述振动子相连,用于对所述振动子的所述气 室反复交替吹气和吸气,以使所述振动子的所述振动膜产生振动;
[0011]
气动闭环控制系统,所述气动闭环控制系统控制所述气动回路系统,以精确调节所 述振动子的振动频率、振幅以及振动间隔/持续时间,且所述气动闭环控制系统实现对 所述振动子的振动频率在0~300hz范围内以及振幅在0~5cm范围内精确可调。
[0012]
根据本发明实施例的局部振动康复训练设备,通过气动闭环控制系统300对气动回 路系统200的控制,可以精确调节振动子100的振动频率、振幅以及振动间隔/持续时 间,且气动闭环控制系统300实现对振动子100的振动频率在0~300hz范围内以及振幅 在0~5cm范围内精确可调,这样可以根据作用对象的症状和病灶点,施加不同参数的振 动刺激,以达到合适的治疗效果,具体包括能够改善神经受损患者的感觉运动功能和运 动控制能力,加快跟腱、韧带术后的恢复,缓解肌肉、关节、韧带、跟腱等处的疼痛, 缓解运动训练的疲劳,增加肌肉力量等等。实验证明,本发明实施例的局部振动康复训 练设备的振动频率为0~300hz,振幅控制更为稳定,为0~5厘米,且在不同的振动频率 下,具有不同的治疗作用,具体参见下表:
[0013][0014][0015]
因此,本发明在运动训练和神经康复领域特别是机械振动刺激领域将有广泛的应用 前景。
[0016]
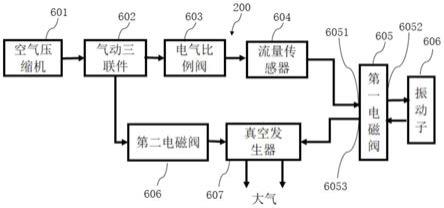
在一些实施例中,所述气动回路系统包括空气压缩机、气动三联件、电气比例阀、 流量传感器、第一电磁阀、第二电磁阀和真空发生器;其中,
[0017]
所述空气压缩机产生的气体经过所述气动三联件过滤干燥后,经过一转二转换接
头 分成两路:
[0018]
一路经所述电气比例阀、所述流量传感器和所述第一电磁阀后进入所述气室,产生 向所述振动子吹气的动作;
[0019]
另一路经所述第二电磁阀流入所述真空发生器,以使所述真空发生器产生真空,进 而使得所述气室内的气体经所述第一电磁阀、所述真空发生器排到大气中,产生向振动 子吸气的动作。
[0020]
在一些实施例中,所述第一电磁阀具有第一阀口、第二阀口和第三阀口;所述第一 阀口与所述流量传感器相连,所述第二阀口与所述振动子相连,所述第三阀口与所述真 空发生器相连;当所述第一阀口与所述第二阀口处于连通时,所述第二电磁阀处于关闭 状态且所述第二阀口与所述第三阀口不连通;当所述第一阀口与所述第二阀口不连通时, 所述第二电磁阀处于打开状态且所述第二阀口和所述第三阀口连通。
[0021]
在一些实施例中,所述流量传感器用来实时检测流入整个气路的流量大小,并反馈 给所述电气比例阀,通过所述气动闭环控制系统控制所述电气比例阀的开口大小,来精 确控制流入到整个气路的流量大小,实现对流入到所述气室的气体量的精确控制,从而 达到对所述振动子的振幅的精确控制。
[0022]
在一些实施例中,所述气动回路系统与至少一个所述振动子相连。
[0023]
在一些实施例中,所述气动闭环控制系统包括上位机和下位机;
[0024]
所述上位机用于设定振动频率、振幅和振动持续时间/间隔时间,并将设定的振动 频率、振幅和振动持续时间/间隔时间传输给下位机;
[0025]
所述下位机以设定的振动频率、振幅和振动持续时间/间隔时间作为目标值,将与 目标值调整一致的振动频率、振幅和振动间隔/持续时间输入到所述气动回路系统中, 以完成设置的振动任务。
[0026]
在一些实施例中,所述下位机包括plc、模拟量输入模块和模拟量输出模块;
[0027]
所述上位机将设定的振动频率传输给所述plc,所述plc根据设定的振动频率来控 制所述第一电磁阀和所述第二电磁阀的通断频率,以实现对所述振动子的振动频率的精 确控制;
[0028]
所述上位机将设定的振幅传输给所述plc,所述plc将设定的振幅转换成对应的目 标流量值,并将目标流量值转换成数字量的目标量;所述流量传感器将检测到的实际流 量值经所述模拟量输入模块转换成数字量的实际量输入给所述plc;所述plc根据实际 量和目标量的差异,经所述模拟量输出模块调节所述电气比例阀的输入电压值,从而改 变输入气压值,通过反复地闭环调节,直到实现目标值和实际值一致为止,最终实现振 幅的精确调节;
[0029]
所述上位机将设定的振动持续时间/间隔时间传输给所述plc,所述plc根据设定的 振动持续时间/间隔时间来控制所述第一电磁阀和所述第二电磁阀的通断频率,以实现 对所述振动子的振动持续时间/间隔时间的控制。
[0030]
在一些实施例中,所述plc包括时间控件、模数转换模块、数模转换模块和pid模 块;其中,
[0031]
所述plc将设定的振动频率值转换成所述第一电磁阀和所述第二电磁阀对应的开闭 持续时间,并通过所述时间控件控制所述第一电磁阀和所述第二电磁阀的开闭持续时
间, 实现所述第一电磁阀和所述第二电磁阀的互锁,达到对振动频率的控制;
[0032]
所述模数转换模块将对应的目标流量值转换成数字量的目标量;所述pid模块将目 标量和实际量进行对比,发现如果两者存在差异时,所述pid模块将调节指令经所述模 拟量输出模块传达到所述电气比例阀中,所述电气比例阀通过调节对应的输入电压来不 断调节气路中的气压值来改变所述流量传感器监测到的气体流量值,这样如此反复,直 到所述pid模块找到合适的比例、积分和差分值,使得目标量和实际量相等,从而通过 精确闭环控制实现所述振动子在设定的振幅下工作;
[0033]
所述plc将设定的振动持续时间/间隔时间转换成所述第一电磁阀和所述第二电磁 阀对应的开闭持续时间,并通过所述时间控件控制所述第一电磁阀和所述第二电磁阀的 开闭持续时间,实现所述第一电磁阀和所述第二电磁阀的互锁,达到对振动持续时间/ 间隔时间的控制。
[0034]
在一些实施例中,所述振动腔体采用硬质材料制成,所述振动膜采用软质材料制成。
[0035]
在一些实施例中,所述振动腔体包括顶壁、第一环侧壁和第一连接环,所述顶壁覆 盖于所述第一环侧壁的轴向一端,所述第一连接环环设于所述顶壁与所述第一环侧壁之 间的连接部处的外侧,所述顶壁、所述第一环侧壁和所述第一连接环为一体成型件;
[0036]
所述振动膜包括膜片主体、第二环侧壁和第二连接环,所述膜片主体覆盖于所述第 二环侧壁的轴向一端,所述第二连接环环设于所述第二环侧壁轴向另一端的外周处,所 述膜片主体、所述第二环侧壁和所述第二连接环为一体成型件;
[0037]
所述振动腔体的所述第一环侧壁适配地嵌套于所述振动膜的所述第二环侧壁的内 侧,且所述振动腔体的所述第一连接环与所述振动膜的所述第二连接环密封贴合并通过 紧固件紧固。
[0038]
在一些实施例中,所述振动子还包括卡环,所述卡环适配地套设在所述第二环侧壁 的外周并且抵接于所述第二连接环;
[0039]
所述紧固件包括螺栓和螺母,所述螺栓穿过所述第一连接环、所述第二连接环和所 述卡环,所述螺母拧设在所述螺栓上,以将所述第一连接环、所述第二连接环和所述卡 环紧固。
[0040]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得 明显,或通过本发明的实践了解到。
附图说明
[0041]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明 显和容易理解,其中:
[0042]
图1为本发明的一种针对小肌肉群的振动子的示意图。
[0043]
图2为本发明的一种针对中肌肉群的振动子的示意图。
[0044]
图3为本发明的一种针对大肌肉群的振动子的示意图。
[0045]
图4为本发明的气动回路系统示意图。
[0046]
图5为本发明的气动闭环控制系统的示意图。
[0047]
图6为本发明的气动闭环控制系统的振幅控制流程示意图。
[0048]
附图标记:
[0049]
振动子100
[0050]
振动腔体1 顶壁101 第一环侧壁102 第一连接环103 气管接口104
[0051]
振动膜2 膜片主体201 第二环侧壁202 和第二连接环203
[0052]
卡环3 螺栓4 螺母5
[0053]
气动回路系统200
[0054]
空气压缩机601 气动三联件602 电气比例阀603 流量传感器604 第一电磁阀 605 第一阀口6051 第二阀口6052 第三阀口6053
[0055]
第二电磁阀606 真空发生器607
[0056]
气动闭环控制系统300
[0057]
上位机7
[0058]
下位机8 plc801 时间控件8011 模数转换模块8012
[0059]
数模转换模块8013 pid模块8014
[0060]
模拟量输入模块802 模拟量输出模块803
具体实施方式
[0061]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相 同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附 图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0062]
如图1至图6所示,根据本发明实施例的局部振动康复训练设备,包括振动子100、 气动回路系统200和气动闭环控制系统300。其中,振动子100包括振动腔体1和振动 膜2,振动腔体1和振动膜2密封连接并共同限定出气室;振动膜2用于与人体局部部 位接触;气动回路系统200与振动子100相连,用于对振动子100的气室反复交替吹气 和吸气,以使振动子100的振动膜2产生振动;气动闭环控制系统300控制气动回路系 统200,以精确调节振动子100的振动频率、振幅以及振动间隔/持续时间,且气动闭环 控制系统300实现对振动子100的振动频率在0~300hz范围内以及振幅在0~5cm范围内 精确可调。
[0063]
具体而言,振动腔体1和振动膜2密封连接并共同限定出气室,这样可以防止气室 中的气体从振动腔体1和振动膜2的连接部位泄露出去。气室的形状和尺寸可以根据不 同人群的肌肉大小、韧带和跟腱长短等来确定,例如,图1的振动子100适用于小肌肉 群,图2的振动子100适用于中肌肉群,图3的振动子100适用于大肌肉群。振动子100 的气室符合一定的流体力学原理,满足高频振动过程中噪音小的需求,当对气室内反复 交替吹气和吸气时,振动腔体1不会发生变形,振动膜2会发生变形而产生振动。当穿 戴振动子100时,振动膜2与人体局部部位贴合接触,该人体局部部位可以为手掌、足 底以及人体的其他部位的肌肉、关节、韧带处,并利用绑带连接振动腔体1并将振动子 100绑固在人体上,当振动膜2在产生振动时,振动膜2会对人体局部部位产生振动刺 激。
[0064]
气动回路系统200与振动子100相连,例如,可以采用单管相连,气动回路系统200 通过对气室反复交替吹气和吸气,可以使振动子100的振动膜2产生振动。
[0065]
气动闭环控制系统300控制气动回路系统200,以精确调节振动子100的振动频率、 振幅以及振动间隔/持续时间,且气动闭环控制系统300实现对振动子100的振动频率 在0
~300hz范围内以及振幅在0~5cm范围内精确可调,能够满足神经康复,运动训练和 术后跟腱、关节、肌肉恢复等不同需求。
[0066]
根据本发明实施例的局部振动康复训练设备,通过气动闭环控制系统300对气动回 路系统200的控制,可以精确调节振动子100的振动频率、振幅以及振动间隔/持续时 间,且气动闭环控制系统300实现对振动子100的振动频率在0~300hz范围内以及振幅 在0~5cm范围内精确可调,这样可以根据作用对象的症状和病灶点,施加不同参数的振 动刺激,以达到合适的治疗效果,具体包括能够改善神经受损患者的感觉运动功能和运 动控制能力,加快跟腱、韧带术后的恢复,缓解肌肉、关节、韧带、跟腱等处的疼痛, 缓解运动训练的疲劳,增加肌肉力量等等。实验证明,本发明实施例的局部振动康复训 练设备的振动频率为0~300hz,振幅控制更为稳定,为0~5厘米,且在不同的振动频率 下,具有不同的治疗作用,具体参见下表:
[0067][0068]
如图4所示,在一些实施例中,气动回路系统200包括空气压缩机601、气动三联 件602、电气比例阀603、流量传感器604、第一电磁阀605、第二电磁阀606和真空发 生器607。其中,空气压缩机601产生的气体经过气动三联件602过滤干燥后,经过一 转二转换接头分成两路:一路经电气比例阀603、流量传感器604和第一电磁阀605后 进入气室,产生向振动子100吹气的动作;另一路经第二电磁阀606流入真空发生器607, 以使真空发生器607产生真空,进而使得气室内的气体经第一电磁阀605、真空发生器 607排到大气中,产生向振动子100吸气的动作。需要说明的是,空气压缩机601的作 用主要是产生压缩空气;气动三联件602的作用是对空气压缩机601产生的气体进行过 滤干燥,可以避免水分或者杂质进入气动管路系统位于气动三联件602后续的器件(如 电气比例阀603、流量传感器604、第一电磁阀605等器件)中,从而起到保护和延长 这些器件使用寿命的目的。第一电磁阀605和第二电磁阀606的作用是通过保持互锁来 精确控制吹吸频率,从而精确控制振动膜2的振动频率;第一电磁阀605和第二电磁阀 606通过互锁还可以精确调节振动间隔/持续时间;第一电磁阀605和第二电磁阀606 通过互锁实现吹气过程时,第一电磁阀605关闭,空气压缩机601只需要给吹气气路供 气,这样会减少在吹气过程中,气体同时经真空发生器607流到
大气中,导致大量的气 体耗散,给空气压缩机601增加供气压力。流量传感器604的作用是实时监测流入到整 个气路的流量大小,并反馈给电气比例阀603,通过控制电气比例阀603的开口大小, 来精确控制流入到整个气路的流量大小,实现对流入到振动子100的气体量的精确控制, 从而达到对振动膜2的振幅的精确控制。
[0069]
在一些实施例中,第一电磁阀605具有第一阀口6051、第二阀口6052和第三阀口 6053;第一阀口6051与流量传感器604相连,第二阀口6052与振动子100相连,第三 阀口6053与真空发生器607相连;当第一阀口6051与第二阀口6052处于连通时,第 二电磁阀606处于关闭状态且第二阀口6052与第三阀口6053不连通;当第一阀口6051 与第二阀口6052不连通时,第二电磁阀606处于打开状态且第二阀口6052和第三阀口 6053连通,由此,实现了第一电磁阀605和第二电磁阀606的互锁状态,从而实现了对 振动子100进行反复交替吹吸过程,同时在吹气过程时,第二电磁阀606处于关闭状态, 空气压缩机601只需要给吹气气路供气,这样会减少在吹气过程中,气体同时经真空发 生器607流到大气中,导致大量的气体耗散,给空气压缩机601增加供气压力。
[0070]
在一些实施例中,流量传感器604用来实时检测流入整个气路的流量大小,并反馈 给电气比例阀603,通过气动闭环控制系统300控制电气比例阀603的开口大小,来精 确控制流入到整个气路的流量大小,实现对流入到气室的气体量的精确控制,从而达到 对振动子100的振幅的精确控制。
[0071]
在一些实施例中,气动回路系统200与至少一个振动子100相连。也就是说,一个 气动回路系统200可以单独与一个振动子100相连,实现单路控制;一个气动回路系统 200也可以与多个振动子100相连,实现多路控制,例如在第一电磁阀605的第二接口 处可以通过一转多转接头与多个振动子100相连,具体地,根据需要选择一转多转接头, 如选择一转二转接头,就可以与两个振动子100对应相连,选择一转五转接头,就可以 与五个振动子100对应相连。
[0072]
如图5和图6所示,在一些实施例中,气动闭环控制系统300包括上位机7和下位 机8;上位机7用于设定振动频率、振幅和振动持续时间/间隔时间,例如上位机7可以 包括带有输入模块且能实时显示的液晶触摸屏,输入模块可以输入设定的指令,如设定 的频率、振幅和振动持续时间/间隔时间等参数;上位机7将设定的振动频率、振幅和 振动持续时间/间隔时间传输给下位机8,例如可以通过网络通讯传输模块进行传输;下 位机8以设定的振动频率、振幅和振动持续时间/间隔时间作为目标值,将与目标值调 整一致的振动频率、振幅和振动间隔/持续时间输入到气动回路系统200中,以完成设 置的振动任务,实现精确调节振动子100的振动频率、振幅以及振动间隔/持续时间, 且实现对振动子100的振动频率在0~300hz范围内以及振幅在0~5cm范围内精确可调。
[0073]
在一些实施例中,下位机8包括plc801、模拟量输入模块802和模拟量输出模块 803。
[0074]
具体地,上位机7将设定的振动频率传输给plc801,plc801根据设定的振动频率 来控制第一电磁阀605和第二电磁阀606的通断频率,以实现对振动子100的振动频率 的精确控制。
[0075]
上位机7将设定的振幅传输给plc801,plc801将设定的振幅转换成对应的目标流 量值,并将目标流量值转换成数字量的目标量;流量传感器604将检测到的实际流量值 经
模拟量输入模块802转换成数字量的实际量输入给plc801;plc801根据实际量和目 标量的差异,经模拟量输出模块803调节电气比例阀603的输入电压值,从而改变输入 气压值,通过反复地闭环调节,直到实现目标值和实际值一致为止,最终实现振幅的精 确调节。
[0076]
上位机7将设定的振动持续时间/间隔时间传输给plc801,plc801根据设定的振动 持续时间/间隔时间来控制第一电磁阀605和第二电磁阀606的通断频率,以实现对振 动子100的振动持续时间/间隔时间的控制。
[0077]
更为具体的,plc801包括时间控件8011、模数转换模块8012、数模转换模块8013 和pid模块8014。其中,
[0078]
plc801将设定的振动频率值转换成第一电磁阀605和第二电磁阀606对应的开闭持 续时间,并通过时间控件8011控制第一电磁阀605和第二电磁阀606的开闭持续时间, 实现第一电磁阀605和第二电磁阀606的互锁,达到对振动频率的控制。
[0079]
模数转换模块8012将对应的目标流量值转换成数字量的目标量;pid模块8014将 目标量和实际量进行对比,发现如果两者存在差异时,pid模块8014将调节指令经模拟 量输出模块803传达到电气比例阀603中,电气比例阀603通过调节对应的输入电压来 不断调节气路中的气压值来改变流量传感器604监测到的气体流量值,这样如此反复, 直到pid模块8014找到合适的比例、积分和差分值,使得目标量和实际量相等,从而 通过精确闭环控制实现振动子100在设定的振幅下工作。
[0080]
plc801将设定的振动持续时间/间隔时间转换成第一电磁阀605和第二电磁阀606 对应的开闭持续时间,并通过时间控件8011控制第一电磁阀605和第二电磁阀606的 开闭持续时间,实现第一电磁阀605和第二电磁阀606的互锁,达到对振动持续时间/ 间隔时间的控制。
[0081]
需要说明的是,在气动闭环控制系统300中,还包括用于向上位机1和下位2供电 的电源管理模块9。
[0082]
在一些实施例中,振动腔体1采用硬质材料制成,例如可以采用pla塑料、abs塑 料等,这样,当对振动子100吹吸气时,振动腔体1不会发生变形;振动膜2采用软质 材料制成,例如可以采用硅橡胶合成材料等,这样,当对振动子100吹吸气时,振动膜 2会相应地发生变形,从而产生振动。
[0083]
在一些实施例中,振动腔体1包括顶壁101、第一环侧壁102和第一连接环103; 顶壁101覆盖于第一环侧壁102的轴向一端,从而可以形成作为气室的空腔;第一连接 环103环设于顶壁101与第一环侧壁102之间的连接部处的外侧;顶壁101、第一环侧 壁102和第一连接环103为一体成型件,加工方便;振动膜2包括膜片主体201、第二 环侧壁202和第二连接环203。膜片主体201覆盖于第二环侧壁202的轴向一端;第二 连接环203设于第二环侧壁202轴向另一端的外周处,膜片主体201、第二环侧壁202 和第二连接环203为一体成型件,加工方便。振动腔体1的第一环侧壁102适配地嵌套 于振动膜2的第二环侧壁202的内侧,且振动腔体1的第一连接环103与振动膜2的第 二连接环203密封贴合并通过紧固件紧固。也就是说,当振动膜2与振动腔体1密封连 接时,膜片主体201主要是用于封闭第一环侧壁102的轴向另一端,从而形成密闭的气 室,通过将振动膜2的第二环侧壁202紧密贴合地包裹在振动腔体1的第一环侧壁102 的外周面上,且振动腔体1的第一连接环103与振动膜2的第二连接环203密封贴合并 通过紧固件紧固,这种固定连接方式更加可靠,组装方便。
[0084]
在一些实施例中,振动子100还包括卡环3,卡环3适配地套设在第二环侧壁202 的外周并且抵接于第二连接环203;紧固件包括螺栓4和螺母5,螺栓4穿过第一连接 环103、第二连接环203和卡环3,螺母5拧设在螺栓4上,以将第一连接环103、第二 连接环203和卡环3紧固。通过设置卡环3,可以使得第二连接环203被紧紧压贴在第 一连接环103上,固定连接更加可靠。
[0085]
在一些实施例中,顶壁101上设有与气动回路系统200连接的气管接口104,方便 气动回路系统200的气管与振动子100相连。优选的,气动回路系统200可以通过单根 气管与振动子100相连,实现高频率的振动。
[0086]
在一些实施例中,振动子100能够在气管超过5m长的情况下也能稳定工作,即该 局部振动康复训练设备能够在功能核磁环境下使用。
[0087]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示 例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结 构、或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的 示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、或者特 点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0088]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱 离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型, 本发明的范围由权利要求及其等同物限定。