1.本技术涉及医疗器械领域,尤其涉及一种瓣膜修复装置。
背景技术:
2.心脏瓣膜反流疾病,特别是二尖瓣反流(mitral regurgitation,mr)和三尖瓣反流(tricuspid regurgitation,tr),是常见的心脏瓣膜疾病。据美国一项社区流行病学研究,二尖瓣反流mr(中度以上)总体患病率为1.7%,75岁以上达9.3%;三尖瓣反流tr(中度以上)总体患病率为0.55%,75岁以上人群患病率接近4%。对于心脏瓣膜反流疾病,经导管缘对缘修复技术被证实是一种安全有效的微创治疗方式。目前用于这种缘对缘修复技术的可植入装置包含abbott公司的mitraclip、edwards公司的pascal,以及国内外多款在研的产品。
3.以二尖瓣反流的修复治疗为例,通过介入输送器械(诸如,导管),先将作为修复装置的夹合器送到二尖瓣左心房侧,调整好形态后,穿过二尖瓣向下进入到左心室侧。此时,一侧上夹臂和下夹臂开始捕捉和夹合瓣叶,夹好一侧后再夹合另一侧。在两侧都夹合住瓣叶之后,将两边的夹臂抱合聚拢,将对合不良的瓣叶夹持在一起,缩小对合距离,增加对合面积。在夹合器的两侧,形成两个“o”形孔。“o”形孔的开闭既可以实现血流通路,又有效的减轻反流。在夹合好瓣叶之后,介入输送器械和夹合器脱离,并撤出体外。此外,三尖瓣、主动脉瓣、肺动脉瓣、上下腔静脉瓣等瓣膜与二尖瓣反流的修复治疗类似,通过夹合瓣叶并缩小瓣叶之间的对合距离,减轻对合不良造成的反流。因此,治疗二尖瓣反流的缘对缘修复产品,基本上也可以适用于这些瓣膜反流的治疗。
4.然而,上述现有技术的作为夹合器的植入装置的夹合区域为接触面积较小的线性夹合,对于严重的反流常常需要植入多个夹合器以增大接触面积,并且对于瓣膜边缘区域的修复效果较差。另外,由于原生瓣环会逐渐扩大,使用上述现有技术治疗瓣膜反流后,往往存在远期瓣膜反流复发的风险。可见,本领域需要改善的瓣膜修复装置,其能够克服上述现有技术修复装置的缺点中的至少一部分。
技术实现要素:
5.本技术涉及一种瓣膜修复装置,包括杆、至少两个夹合器以及防反流器。杆具有远端和近端且沿瓣膜修复装置的纵向轴线延伸。至少两个夹合器围绕杆布置在杆的远端处,用于夹合瓣膜。防反流器围绕杆设置在至少两个夹合器的近侧且具有沿纵向轴线从远侧向近侧渐缩的形状。一方面,夹合器可以将瓣叶捕捉以进行固定,进而通过至少两个夹合器偏转靠近杆使两片或更多片瓣叶的对合距离减小,从而减轻或消除在瓣叶关闭状态下的血液反流。另一方面,防反流器的渐缩形状使得血流在防反流器外侧远向地流动的阻力小于流体在防反流器内侧近向地流动的阻力,从而在促进血流正向地通过瓣膜的同时,减轻或消除血流逆向地反流。
6.在一些实施例中,防反流器具有沿圆周向设置的多个瓣,多个瓣中的每对相邻瓣
之间具有间隙。间隙为多个瓣之间的弹性收缩和扩张提供了空间。
7.在一些实施例中,多个瓣中的每个瓣的近端在径向靠近杆的位置处相接,并且多个瓣中的每个瓣的主体从各自的近端向远端方向且径向向外的方向延伸。由此,多个瓣整体地构成防反流器的沿纵向轴线从远侧向近侧渐缩的形状。
8.在一些实施例中,多个瓣中的每个瓣的远端向近端方向且径向向外的方向延伸,从而相对于相应的瓣的主体向近端方向翘起。该近向翘起使得防反流器在植入状态下面向瓣膜一侧提供相对圆滑的表面并具有一定的轴向弹性,以免过度压迫或划伤瓣叶。
9.在一些实施例中,防反流器配置为可以(例如,在瓣膜修复装置植入之后)至少部分地移动靠近杆的远端。在此情况下,位于瓣膜近侧(即,正常血流的上游侧,例如对于二尖瓣而言,左心房侧)的防反流器的远侧(即面向瓣膜一侧)可以贴靠在瓣膜的近侧上,从而“罩住”瓣叶,以防止短期瓣叶向近侧过度运动造成的二尖瓣反流以及长期瓣环扩大造成瓣叶闭合不全而导致远期反流复发等临床问题。另外,在植入后,通过防反流器的内皮化,可以进一步控制瓣口的面积,以促进中远期的治疗效果。
10.在一些实施例中,防反流器具有镂空开口。镂空开口减轻瓣膜修复装置整体的重量,以减小在植入状态下对瓣膜和腱索等相关组织的拉力,从而改善长期治疗效果。此外,镂空开口也改善防反流器的可压缩性,使其更易于收缩容纳在介入输送器械(诸如,导管)内。
11.在一些实施例中,至少两个夹合器中的每个夹合器包括弹力臂和夹合片。弹力臂具有弹力地可偏转的弯折形状,以可逆地偏转靠近或远离杆。夹合片具有固定部和转动部,固定部固定于弹力臂,而转动部相对于固定部和弹力臂可转动,以与弹力臂夹合或从弹力臂打开,从而将瓣叶捕捉在两者之间。进一步,通过弹力臂可逆地偏转靠近杆,可以减小瓣叶的对合距离,从而消除或减轻反流。
12.在一些实施例中,瓣膜修复装置还包括中空套。中空套具有开口的远端、开口的近端,以及在开口的远端与开口的近端之间延伸的侧壁。中空套围绕杆的至少部分,且其径向尺寸大于杆的径向尺寸。当至少两个夹合器捕捉瓣叶并可逆地偏转靠近杆以减小对合距离时,中空套被夹在至少两个夹合器之间,使得被夹合的瓣叶之间留有一定距离,而并非被完全夹合在一起。这使治疗后的瓣叶在夹合位点处受到夹合器的牵拉角度较圆润,与自然状态的瓣膜的形状更为接近。
13.在一些实施例中,杆具有滑槽,滑槽沿纵向轴线延伸。滑槽为后文更详细描述的销提供对应的安装结构,以便将诸如防反流器、中空套等部件安装在杆上,以便于这些部件沿着纵向轴线近向地或远向地滑动。
14.在一些实施例中,防反流器具有第一销,第一销固定在多个瓣中的一对径向相对的瓣的近端,第一销的两端分别固定在防反流器的径向相对的位置处。第一销穿设在杆的滑槽中,并且配置为可沿纵向轴线近向地或远向地滑动,以使防反流器相对于杆沿纵向轴线近向地或远向地滑动。
15.在一些实施例中,中空套具有第二销,第二销的两端分别固定在中空套上的径向相对的位置处。第二销穿设在杆的滑槽中,并且配置为可沿纵向轴线近向地或远向地滑动,以使中空套相对于杆沿纵向轴线近向地或远向地滑动。
16.在一些实施例中,夹合器的弹力臂具有相对于彼此成夹角且弹力地可偏转的远侧
部和近侧部,远侧部的第一端相对于杆的远端固定,远侧部的第二端连接到近侧部的第一端。在此情况下,通过远侧部和近侧部之间的弹力偏转,可以实现弹力臂靠近和远离杆的可逆偏转。
17.在一些实施例中,夹合器的弹力臂的近侧部的第二端固定到中空套的远端,使得当中空套相对于杆远向移动时,弹力臂的远侧部和近侧部朝向彼此弯折靠近,从而使弹力臂偏转靠近中空套。在此情况下,在植入过程中可以通过控制中空套在杆上远向和近向的移动而容易地控制弹力臂靠近和远离杆的偏转,而不必为弹力臂的偏转提供专用的控制,从而简化植入过程并缩短手术时间。
18.在一些实施例中,瓣膜修复装置还包括锁定环套,锁定环套固定在杆的远端处,并且至少两个夹合器中的每个夹合器的弹力臂的远侧部的第一端固定到锁定环套。在此情况下,通过锁定环套将弹力臂的远侧部和杆的远端牢固地固定。
19.在一些实施例中,中空套的近端固定到所述防反流器,使得当所述中空套相对于所述杆远向移动时,所述防反流器相对于所述杆远向移动。
20.在一些实施例中,杆、至少两个夹合器、中空套和防反流器中的一者或多者包覆有生物相容性膜,从而促进内皮化过程的发生。在一些实施例中,生物相容性膜的材料包含聚对苯二甲酸乙二醇酯(pet)。在一些实施例中,杆、至少两个夹合器、中空套和防反流器中的一者或多者由镍钛合金制成,其具有密度小、加工性能优良、压缩比大、耐久性优良、生物相容性优良等优点。
附图说明
21.本文中以下参考附图描述了所公开的瓣膜修复装置,其中:
22.图1a示出了图示现有技术瓣膜修复装置的治疗效果在瓣膜平面中的俯视图;
23.图1b示出了现有技术瓣膜修复装置的治疗效果沿图1a中的虚线截取的侧视截面图;
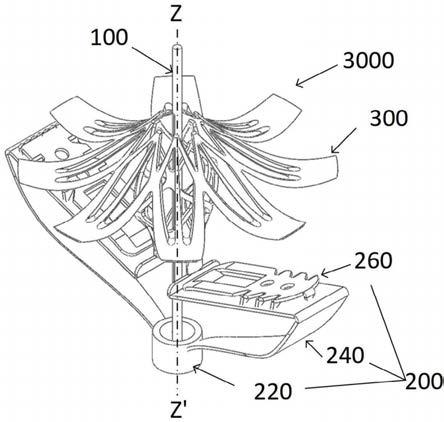
24.图2a示出了根据本技术的实施例的瓣膜修复装置在展开状态下的侧俯视立体图;
25.图2b示出了根据本技术的实施例的瓣膜修复装置在展开状态下的侧视图;
26.图2c示出了根据本技术的实施例的瓣膜修复装置在展开状态下的侧俯视俯视图;
27.图2d示出了根据本技术的实施例的瓣膜修复装置在展开状态下的仰视图;
28.图3a示出了根据本技术的实施例的瓣膜修复装置的杆的侧视图;
29.图3b示出了根据本技术的实施例的瓣膜修复装置的中空套的侧视图;
30.图3c示出了根据本技术的实施例的瓣膜修复装置的防反流器的侧视图;
31.图3d示出了根据本技术的实施例的瓣膜修复装置的防反流器的俯视图;
32.图3e示出了根据本技术的实施例的瓣膜修复装置的夹合器的弹力臂的侧俯视立体图;
33.图3f示出了根据本技术的实施例的瓣膜修复装置的夹合器的夹合片的侧仰视立体图;
34.图3g示出了图3b中的弹力臂与图3c中的夹合片的组合关系的侧俯视立体图;
35.图3h示出了根据本技术的实施例的瓣膜修复装置的锁定环套的侧俯视立体图;
36.图4a示出了根据本技术的实施例的瓣膜修复装置在收缩在介入输送器械中的状
态下的侧视图;
37.图4b示出了根据本技术的实施例的瓣膜修复装置在从介入输送器械部分伸出的状态下的侧视图;
38.图4c示出了根据本技术的实施例的瓣膜修复装置在准备捕捉瓣膜的状态下的侧视图;
39.图4d示出了根据本技术的实施例的瓣膜修复装置在捕捉到瓣膜的状态下的侧视图;
40.图4e示出了根据本技术的实施例的瓣膜修复装置在夹合瓣叶的状态下的侧视图;
41.图4f示出了根据本技术的实施例的瓣膜修复装置在夹合瓣叶的状态下的俯视图,其中出于清楚省略了瓣膜的图示;
42.图4g示出了根据本技术的实施例的瓣膜修复装置在将防反流器设置就位的状态下的侧视图;
43.图4h示出了根据本技术的实施例的瓣膜修复装置在将防反流器设置就位的状态下的俯视图,其中出于清楚省略了瓣膜的图示;
44.图5a示出了图示根据本技术的实施例的瓣膜修复装置的治疗效果在瓣膜平面中的俯视图,其中出于清楚省略了防反流器的图示;以及
45.图5b示出了根据本技术的实施例的瓣膜修复装置的治疗效果沿图5a中的虚线截取的示意性侧视截面图。
具体实施方式
46.以下参考附图详细描述了根据本技术的实施例的瓣膜修复装置、其植入过程以及治疗效果,其中相同附图标记在若干视图中指代相同或对应的元件。如本文中所使用的,术语“远”是指瓣膜修复装置、介入输送器械(诸如,导管)等或其部件距操作者(诸如医生)较远的方向(诸如,图2a-2b、图3a-3e、图3g-3h、图4a-4e、图4g的下方和图3f的上方),而术语“近”是指瓣膜修复装置、介入输送器械(诸如,导管)等或其部件距操作者(诸如医生)较近的方向(诸如,图2a-2b、图3a-3e、图3g-3h、图4a-4e、图4g的上方和图3f的下方)。换言之,在植入过程期间,瓣膜修复装置、介入输送器械(诸如,导管)等或其部件的“远端”是先进入患者体内的一端,而“近端”是后进入患者体内的另一端。在本技术中,“二尖瓣”、“瓣膜”与诸如三尖瓣、主动脉瓣、肺动脉瓣、上下腔静脉瓣的其他瓣膜可互换地使用,因为根据本技术的瓣膜修复装置可以适用于修复各种瓣膜,只需根据瓣环的尺寸和瓣叶的数量和治疗需求调整装置所包含的夹合器的尺寸和数量。因此,以下虽然可能对于二尖瓣反流修复治疗的情况解释了根据本技术的瓣膜修复装置的各部件及其作用和有益效果,但应理解,这些部件及其作用和有益效果同样适用于其他瓣膜的反流修复治疗。
47.图1a为常规瓣膜修复装置在瓣膜平面中的俯视图。图1b示出了瓣膜修复装置沿图1a中的虚线截取的侧视截面图。以下的实施例和图示以二尖瓣为例。在采用该常规瓣膜修复装置1000对反流的瓣膜2000进行植入夹合治疗之后,作为夹合器的瓣膜修复装置1000将瓣叶v1、v2在狭小的直线形区域完全夹合,并且夹合位点s1、s2的面积较小。因此,当治疗对合不良较严重的病例时,往往需要植入多个夹合器1000(未示出),从而造成手术时间延长。而且,在该方案中,单纯依靠夹合形成的两个“o”形孔来提供血流的正常流动并限制反流,
因此这些夹合器1000对瓣膜的中央区域(例如,二尖瓣的a2和p2区)的反流治疗效果较好。然而,这些夹合器1000对瓣膜的边缘区域(例如,二尖瓣的p1、a1、p3、a3、ac和pc区)治疗效果较差,因为夹合器1000在瓣膜的边缘区域难以精确地放置和夹闭。另外,夹合器1000与瓣叶v1、v2的接触面积小会对瓣叶造成较强的挤压力,并且多个夹合器1000的使用造成瓣叶v1、v2和腱索等相关组织需要承受额外的重量。此外,如侧视截面图1b所示,该夹合器1000在夹合位点s1、s2处对瓣叶v1、v2的牵拉角度θ1相对于自然状态(无植入物的健康瓣叶)改变相当显著,接近90
°
。这导致瓣叶v1、v2受到过度的牵拉力,加剧瓣叶和腱索的拉伸和损伤,造成瓣叶v1、v2在远期存在向心房侧过度运动的倾向。瓣叶向心房侧过度运动是瓣膜反流发生和治疗后复发的重要成因。
48.图2a-2d分别示出了根据本技术的实施例的瓣膜修复装置在展开状态下的侧俯视立体图、侧视图、俯视图以及仰视图,而图3a-3h则分别示出了瓣膜修复装置的各个组成部件。
49.根据本技术的实施例的瓣膜修复装置3000的展开状态可以对应于在将其各部件组装之后而在使其收缩容纳在诸如导管的介入输送器械内之前的状态,以最佳地示出组装的瓣膜修复装置3000的整体外观。参考图2a和图2b,根据本技术的实施例的瓣膜修复装置3000可以包含沿着纵向轴线z-z’延伸的杆100。如图3a所示,杆100可以具有近端112、远端114和在近端112与远端114之间沿着纵向轴线延伸的杆体110。作为主体骨架,杆100可以为瓣膜修复装置3000的其他部件提供安装位置。杆100可以在植入期间可释放地连接到介入输送器械内的连接件,从而使连接件连接到瓣膜修复装置3000。在一些实施例中,杆100可以是从近端112到远端114整体上贯穿的中空管状结构。
50.根据本技术的实施例的瓣膜修复装置3000还可以包含至少两个夹合器200,它们可以围绕杆100布置在杆100的远端114处,以用于夹合瓣叶并将瓣叶引导到彼此接近的位置,从而缩小瓣叶之间的对合距离。
51.根据本技术的实施例的瓣膜修复装置3000还可以包含中空套400。如图3b所示,中空套400可以具有开口远端414、开口近端412,以及在开口远端414与开口近端412之间延伸的侧壁410,并且中空套400的径向尺寸大于杆100的径向尺寸,如图2b所示。在一些实施例中,中空套400的径向尺寸可以远大于杆100的径向尺寸,例如2倍至20倍。如以下将更详细描述的,当至少两个夹合器200夹合瓣叶并朝向杆100偏转时,中空套400能够被夹在至少两个夹合器200中间,以使得被夹合的瓣叶之间间隔一定距离,而非被完全夹紧到一起。在一个实施例中,中空套400可以在俯视图(例如,图4f)中具有实质上椭圆形的截面形状,椭圆形的短轴位于至少两个夹合器200之间,而椭圆形的长轴与至少两个夹合器200之间的连线垂直,如图5a所示。在另一实施例中,中空套400可以初始地在俯视图(例如,图4f)中具有圆形形状,但在被至少两个夹合器200夹合后形变为上述椭圆形形状。在上述任一实施例的情况下,在夹合之后,中空套400的椭圆形的截面形状可以增大中空套400与至少两个夹合器200之间的接触面积,从而改善夹合的稳定性。
52.在一些实施例中,在至少两个夹合器200的夹合作用下,中空套400的至少被夹合在夹合器200之间的部分可以形变为近侧宽远侧窄。换言之,中空套400的形变使得,在至少两个夹合器200夹合的状态下,至少两个夹合器200的近侧的距离大于它们的远侧的距离,如后文将参考图4e、图4g和图5b更详细描述。因此,瓣叶受到牵拉的角度更接近自然状态,
且收到的牵拉力较小。可以理解,可以通过将中空套400的侧壁410在开口远端414附近的部分的可压缩性设计为大于中空套400的侧壁410在开口近端412附近的部分的可压缩性,从而实现中空套400的上述近侧宽远侧窄的形变。在一些实施例中,中空套400的侧壁410可以具有网格状结构,从而减轻重量并改善柔软度、弹性和可压缩性。
53.根据本技术的实施例的瓣膜修复装置3000还可以包含防反流器300,其设置在中空套400的近侧。如侧视图3c和俯视图3d更清楚地示出,防反流器300可以整体上呈漏斗形,其沿纵向轴线从远侧向近侧(即,图3c中从下向上)渐缩。如以下将参考图5b更详细描述的,由于防反流器300的该渐缩的形状,血液在防反流器300外侧(近侧,如图3c所示的上侧)远向(例如,对于二尖瓣为从左心房向左心室流动的正常血流方向,如图3c、图4g和图5b中从上向下)流动的阻力小于血液在防反流器300内侧(远侧,如图3c所示的下侧)近向(例如,对于二尖瓣为从左心室向左心房流动的反流方向,如图3c、图4g和图5b中从下向上)流动的阻力。防反流器300的这样的对血液的远向和近向流动的阻力差异使得在促进血液从近侧(例如,对于二尖瓣而言,左心房侧)通过瓣膜到远侧(例如,对于二尖瓣而言,左心室侧)正常流动的同时,减轻或消除血液从远侧通过瓣膜到近侧的反流。
54.在一些实施例中,至少两个夹合器200中的每个夹合器200可以包括弹力臂240和夹合片260。如图3e所示,弹力臂240具有弹力地可偏转的弯折形状,其能够弹力地可逆地偏转靠近和远离杆100。虽然图3e将弹力臂240图示为彼此成锐角弯折的两部分242、244,但根据本技术的弹力臂240不限于此,并可以具有任意其他能够弹力地弯折的形状。作为示例,弹力臂240可以具有简单的“c”形或“s”形侧视形状,以提供可逆弹力弯折的特性。如图3f所示,在一些实施例中,夹合片260可以具有固定部264和转动部262,二者在各自的一端处连接并能够以该处为枢转轴相对于彼此弹力偏折。如图3g所示,夹合片260的固定部264固定在弹力臂240上,而夹合片260的转动部262相对于固定部264和弹力臂240可转动,从而与弹力臂240夹合或从弹力臂240打开,以将瓣叶的捕捉夹合在转动部262与弹力臂240之间或将瓣叶释放。当弹力臂240偏转靠近杆100时,可以使夹合器200偏转靠近杆100,从而将两片或更多片被夹合瓣叶的对合距离缩小,以减轻或消除在瓣叶关闭状态下的血液反流。
55.根据本技术的实施例的瓣膜修复装置3000一方面利用夹合器200缩小瓣叶的对合距离以改善瓣叶之间的对合,另一方面利用防反流器300改变血流在正常血流方向和反流方向上的流体力学以在促进正常血流的情况下阻碍血液的反流,并抑制瓣叶向近侧(例如,对二尖瓣而言,左心房侧)过度运动。通过上述两方面的共同作用,瓣膜修复装置3000提供改善的瓣膜反流治疗效果。此外,防反流器300在瓣膜近侧“罩住”瓣膜,能够抑制瓣叶向近侧过度运动。在瓣膜修复装置3000(包括防反流器300)完成内皮化过程之后,可以在修复位置与瓣叶形成一体,从而进一步改善了防反流的中远期治疗效果。
56.在一些实施例中,如图3c和图3d所示,防反流器300可以具有沿圆周向设置的多个瓣310,多个瓣310中的每对相邻瓣310之间可以具有间隙340。间隙340为多个瓣310之间的弹性收缩和扩张提供空间,以便在植入前将防反流器300收缩容纳到诸如导管的介入输送器械内。
57.在一些实施例中,如图3c和图3d所示,防反流器300的多个瓣310中的每个瓣310的近端312在径向靠近杆100的位置处相接。多个瓣314中的每个瓣310的主体314可以从各自的近端312在远向(如图3c中向下)且径向向外的方向上延伸,从而为防反流器300提供整体
上沿纵向轴线(未示出)从远侧向近侧(如图3c从下向上)渐缩的形状。
58.在一些实施例中,如图3c所示,防反流器300的多个瓣310中的每个瓣310的远端316可以在近向(如图3c中从下向上)且径向向外的方向上延伸,从而相对于相应的瓣310的主体314向近向地翘起。每个瓣310的该近向翘起使得防反流器310在植入状态下面向瓣膜的一侧(如图3c中的下侧)提供相对圆滑的表面并具有一定的轴向弹性,从而可以避免过度压迫或划伤瓣叶。
59.在一些实施例中,如以下将参考图4g进一步描述的,在将瓣膜修复装置3000植入以夹合瓣膜之后,防反流器300可以至少部分地移动靠近杆100的远端114。此时,防反流器300位于瓣膜近侧(即,正常血流的上游侧,例如对于二尖瓣而言,左心房侧),防反流器300的远侧可以贴靠在瓣膜的近侧上(例如对于二尖瓣而言,在左心房侧贴靠在二尖瓣的植入位点处),从而“罩住”瓣叶,以防止瓣叶向近侧(例如对于二尖瓣而言,左心房侧)过度运动对瓣叶、腱索等组织的牵拉造成损伤以及远期的反流复发。另外,在植入后,通过防反流器300的内皮化,可以使瓣叶与防反流器300逐渐生长为一体,以进一步控制瓣口的面积,从而促进中远期的治疗效果。
60.在一些实施例中,如图3c和图3d所示,防反流器300可以具有镂空开口318。在一些实施例中,防反流器300的多个瓣310中的每个瓣310具有镂空开口318,开口318沿着瓣310的主体314延伸。镂空开口318减轻防反流器300和瓣膜修复装置3000整体的重量,以减小在植入状态下对瓣叶和腱索等相关组织的牵拉,从而改善长期治疗效果并避免反流复发。另外,镂空开口318也改善防反流器300的柔软度和弹性,以便于在植入前收缩容纳在诸如导管的介入输送器械内,且在植入后避免过度压迫或划伤瓣叶。
61.在一些实施例中,如图3a所示,杆100可以具有滑槽120,滑槽120可以沿杆100的纵向轴线(未示出)延伸并贯穿杆100的杆体110。如后文更详细描述的,滑槽120可以为销提供对应的安装结构,以便将诸如防反流器300、中空套400等部件安装在杆100上,并使得这些部件能够沿着纵向轴线近向地或远向地滑动。
62.在一些实施例中,如图3d所示,防反流器300可以具有第一销320。第一销320的两端可以分别固定在防反流器300的径向相对的位置处,以穿过防反流器300在俯视图3d中的几何对称中心。在一些实施例中,第一销320可以固定在多个瓣310中的一对径向相对的瓣310(例如,图3d中径向相对的左下和右上的瓣310)的近端312处。在将防反流器300组装到杆100之后,第一销320可以穿设在杆100的滑槽120中,并且可以沿纵向轴线近向地和/或远向地滑动,以使防反流器300可以相对于杆100沿纵向轴线近向地和/或远向地滑动。
63.在一些实施例中,中空套400可以具有第二销(未示出),第二销的两端可以分别固定在中空套400上的径向相对位置处。第二销可以穿设在杆100的滑槽120中,并且可以沿纵向轴线近向地和/或远向地滑动,从而使中空套400相对于杆100沿纵向轴线近向地和/或远向地滑动。在此情况下,防反流器300和中空套400可以分别借助于第一销320和第二销在杆100的滑槽120中沿纵向轴线单独地近向地和/或远向地滑动,从而能够分别较精确地调整防反流器300和中空套400的轴向位置,以改善夹合器200对瓣叶的夹合效果和防反流器300对瓣叶的贴靠效果。
64.虽然在上述实施例中,防反流器300和中空套400分别借助于第一销320和第二销在杆100的滑槽120中沿纵向轴线单独地近向地和/或远向地滑动,但根据本技术的瓣膜修
复装置3000的中空套400相对于杆100沿纵向轴线的移动方式不限于此,并且在另一些实施例中,中空套400可以在其近端412(如图3b所示)固定到防反流器300。在此情况下,随着中空套400相对于杆100远向移动,防反流器300也相对于杆远向移动,反之亦然。在此情况下,在植入过程中,可以在一个操作中同时控制中空套400和防反流器300的远向移动,即当操纵中空套400远向移动时,防反流器300也随着远向移动以“罩住”瓣膜的近侧(对于二尖瓣而言,左心房侧),从而约束瓣叶向近侧的过度运动,并简化植入过程并缩短手术时间。
65.在一些实施例中,防反流器300的直径小于或等于30mm。在另一些实施例中,防反流器300的径向尺寸可根据瓣膜修复装置3000所应用的目标患者群体及具体瓣膜位置的解剖结构设置。
66.在一些实施例中,如后文将参考图4e-图4f更详细描述的,在弹力臂240偏转靠近杆100的状态下,相应的夹合片260可以至少部分地抵靠在中空套400的侧壁410上。如以下将参考图5a更详细描述的,当至少两个夹合器200偏转靠近杆100时,由于至少两个夹合器200将中空套400夹在中间,因此至少两个夹合器200之间可以留有一定空间而非完全夹紧在一起,使得被夹合的瓣叶受到牵拉的角度更接近自然状态,避免了对瓣叶和腱索施加过度的牵拉而造成损伤或影响防反流效果。相比之下,如以上参考图1a和1b所描述,现有技术的夹合器1000在夹合位点p1、p2处将瓣叶v1、v2完全夹合为一段线性区段,这对瓣叶v1、v2的牵拉角度在瓣膜平面的侧视截面图1b中接近90
°
,相对于自然状态(无植入物的健康瓣叶)改变相当显著。这样的非自然的牵拉导致瓣叶v1、v2在远期有向近侧(例如对于二尖瓣而言,左心房侧)过度运动的倾向,并因此加剧腱索的拉伸和损伤,提高了瓣膜反流远期复发的风险。
67.在一些实施例中,如后文将参考图4f更详细描述的,在至少两个夹合器200中的一对径向相对的夹合器200(例如,图4f所示的左侧的和右侧的一对径向相对的夹合器200)的弹力臂240偏转靠近杆100的状态下,中空套400可以被该对径向相对的夹合器200部分地压扁。在此情况下,中空套400的柔性形变进一步减轻对瓣叶的牵拉力。
68.在一些实施例中,如图3e所示,弹力臂240可以具有相对于彼此成夹角且弹力地可偏转的远侧部244和近侧部242。弹力臂240的远侧部244的第一端248可以相对于杆100的远端114固定,远侧部244的第二端246可以连接到近侧部242的第一端。在此情况下,通过远侧部244和近侧部242之间的弹力偏转,可以实现弹力臂240靠近和远离杆100的可逆偏转。
69.在一些实施例中,如图2a所示,弹力臂240的近侧部242的第二端247可以固定到中空套400的远端414。当中空套400相对于杆100远向移动时,带动弹力臂240的近侧部242的第二端247向下移动,而弹力臂240的远侧部244的第一端248相对于杆100的远端114静止。因此,弹力臂240的远侧部244和近侧部242以远侧部244的第二端246为枢转轴朝向彼此弯折靠近,从而使弹力臂240偏转靠近杆100。反之,当中空套400相对于杆100远向移动时,弹力臂240偏转远离杆100。在此情况下,在植入过程中,可以通过控制中空套400在杆100上远向和近向的移动而容易地控制弹力臂240靠近和远离杆100的偏转,而不必为弹力臂240的偏转提供专用的控制,从而简化植入过程并缩短手术时间。进一步地,在中空套400的近端412附加地固定到防反流器300的情况下(如以上参考图3b关于中空套400所描述),可以在一个操作中同时实现中空套400远向移动、弹力臂240偏转靠近杆100以及防反流器300远向移动以“罩住”瓣膜的近侧,或反之亦然,从而进一步简化植入过程并缩短手术时间。这也减
少了诸如导管的介入输送器械内需要预先提供的诸如操作绳的操作机构的数量和复杂度。
70.在一些实施例中,如图3h所示,根据本技术的实施例的瓣膜修复装置3000还可以包括锁定环套220。锁定环套220可以固定在杆的远端处,并且至少两个夹合器200中的每个夹合器200的弹力臂240的远侧部244的第一端248可以固定到锁定环套220。在此情况下,通过锁定环套220将夹合器200的弹力臂240的远侧部244和杆100的远端114牢固地固定。
71.在一些实施例中,如图3f所示,夹合器200的夹合片260的转动部262可以具有朝向弹力臂240的一个或多个凸起266。如以下将参考图4e更详细描述的,在捕捉并夹合瓣叶后,夹合片260的转动部262上的一个或多个凸起266中的至少一些可以刺穿瓣叶,从而增强夹合器200对瓣叶的固定,并加快夹合器200的内皮化过程。例如,一个或多个凸起266可以为尖刺状结构。
72.在一些实施例中,如图3f所示,夹合器200的夹合片260的转动部262还可以具有用于穿过操作绳的至少两个操作孔268。夹合片260的固定部264可以固定在弹力臂240的近侧部242上。在植入过程期间,可以通过将诸如导管的介入输送器械中预先穿过操作孔268的操作绳拉紧,控制夹合片200的转动部262相对于弹力臂240的近侧部242的打开,如图3g中的箭头a所示。反之,可以通过将穿过操作孔268的操作绳放松,使夹合片200的转动部262相对于弹力臂240的近侧部242闭合。
73.在一些实施例中,杆100、至少两个夹合器200、中空套400和防反流器300中的一者或多者可以包覆有生物相容性膜,从而促进植入之后的内皮化过程。在一些实施例中,该生物相容性膜的材料优选包含聚对苯二甲酸乙二醇酯(pet)。在一些实施例中,杆100、至少两个夹合器200、中空套400和防反流器300中的一者或多者可以由镍钛合金制成,其具有形状记忆性能、密度小、加工性能优良、压缩比大、耐久性优良、生物相容性优良等优点。
74.虽然未示出,但根据本技术的瓣膜修复装置3000还可以包含用于连接到介入输送器械(诸如,导管)和从介入输送器械脱离的部件、操作以上各组件的移动的部件,以及用于将以上各组件暂时和/或永久地锁定就位的部件。这些部件可以采用本领域现有的或尚待开发的部件实现,并与根据本技术的各种实施例的瓣膜修复装置3000进行组合。此外,虽然以上将杆100、夹合器200、防反流器300和中空套400等组件分开地描述,但根据本技术的实施例并不排除其中任意两个或更多个组件为一体成形的整体结构。作为示例,锁定环套220和杆100可以在诸如模塑等工艺期间一体成形地制造为整体。替代地,锁定环套220和杆100也可以分开地制造,然后通过粘合、熔合、焊接等方式组合在一起。
75.以下将参考图4a-图4h解释根据本技术的实施例的瓣膜修复装置3000的植入过程,并参考图5a-图5b解释其治疗效果和优点。出于说明目的,以下植入过程将参考二尖瓣反流修复进行描述,但应理解,根据本技术的实施例的瓣膜修复装置3000的植入过程中个部件的作用、变化及其有益效果同样适用于其他瓣膜反流的植入修复过程。
76.图4a示出了根据本技术的实施例的瓣膜修复装置3000在收缩在介入输送器械中的状态下的侧视图。在植入的准备阶段,瓣膜修复装置3000收缩容纳在诸如导管的介入输送器械4000内。此时,瓣膜修复装置3000的夹合器200弹力地偏转靠近杆100,且中空套400和防反流器300也至少部分地径向收缩,使得瓣膜修复装置3000整体的径向尺寸缩小,以便设置在通常内径较小的介入输送器械4000内。在此阶段,弹力臂240的可逆弹力偏转、中空套400的网格状结构、防反流器300的瓣310之间的间隙340和瓣310上的镂空开口318等均有
助于改善瓣膜修复装置3000整体的柔软度和弹性,以便于径向收缩。应理解,出于图示清楚,省略了介入输送器械400中与瓣膜修复装置3000连接的其它结构和用于操作瓣膜修复装置3000的部件的结构(诸如,用于穿过操作孔268并操纵夹合器200的夹合片260相对于弹力臂240张开和夹合的操作绳)。
77.图4b示出了根据本技术的实施例的瓣膜修复装置3000在从介入输送器械部分伸出的状态下的侧视图。以二尖瓣修复过程为例,在介入输送器械4000进入左心房之后,尚未通过二尖瓣进入左心室之前,使瓣膜修复装置3000的至少夹合器200从介入输送器械4000的远端伸出(如图4a中的箭头b所示)并打开,并调整瓣膜修复装置3000的取向角度,使得瓣膜修复装置3000的杆100实质上垂直于二尖瓣平面,并且一对夹合器200实质上对准要夹合的两个瓣叶的方向。在此阶段,可以利用夹合器200的弹力臂240自身的弹力或形状记忆性能使夹合器200偏转远离杆100,也可以通过介入输送器械4000的操纵机构使夹合器200偏转远离杆100。在弹力臂240的近侧部242的第二端247连接到中空套400且弹力臂240的远侧部244的第一端248固定到杆100的远端114的情况下,也可以通过使中空套400沿着纵向轴线近向移动,带动弹力臂240的近侧部242的第二端247近向移动,从而使弹力臂240的近侧部242和远侧部244夹角增大,导致弹力臂240弹力地偏转远离杆100。
78.图4c示出了根据本技术的实施例的瓣膜修复装置3000在准备捕捉瓣膜的状态下的侧视图。仍以二尖瓣修复过程为例,在图4b所示的阶段之后,如图4c所示,可以使瓣膜修复装置3000的一对夹合器200穿过二尖瓣(未示出)到左心室侧,而防反流器300仍留在左心房侧而不穿过二尖瓣。然后,可以例如通过将穿过夹合片260的操作孔268的操作绳拉紧,使夹合器200的夹合片260相对于弹力臂240的近侧部242打开,如图4c中的箭头c所示。虽然图4c将防反流器300示出为已经从介入输送器械4000(未示出)伸出,但应理解,由于防反流器300不参与准备捕捉瓣叶v1、v2的过程,此时防反流器300也可以仍位于介入输送器械4000内部且保持收缩状态。
79.图4d示出了根据本技术的实施例的瓣膜修复装置3000在捕捉到瓣膜的状态下的侧视图。仍以二尖瓣修复过程为例,在图4c所示的阶段之后,如图4d所示,可以将二尖瓣的两个瓣叶v1、v2捕捉在一对夹合器200的夹合片260与弹力臂240的近侧部242之间。然后,通过使夹合片260向远向偏转靠近弹力臂240的近侧部242(如图4d中的箭头d1所示),和/或通过使弹力臂240向杆100偏转靠近夹合片260(如图4d中的箭头d2所示),将两个瓣叶v1、v2夹合在夹合片260与弹力臂240的近侧部242之间。在此阶段,两个瓣叶v1、v2分别被两个夹合器200固定住,且夹合片260的转动部262上的朝向弹力臂240的近侧部242的一个或多个凸起266中的至少部分可以刺穿瓣叶v1、v2,从而增强固定效果并促进夹合器与瓣叶的内皮化过程。虽然图4d将防反流器300示出为已经从介入输送器械4000(未示出)伸出,但应理解,由于防反流器300不参与捕捉瓣叶v1、v2的过程,此时防反流器300也可以仍位于介入输送器械4000内部且保持收缩状态。
80.图4e示出了根据本技术的实施例的瓣膜修复装置3000在夹合瓣叶的状态下的侧视图,图4f示出了根据本技术的实施例的瓣膜修复装置3000在夹合瓣叶的状态下的俯视图,其中出于清楚省略了瓣膜的图示。仍以二尖瓣修复过程为例,在图4d所示的阶段之后,如图4e-图4f所示,一对夹合器200带着一对瓣叶v1、v2向杆100偏转靠近,如图4e中的箭头e所示,以抵靠在中空套400的侧壁410上,从而缩小瓣叶v1、v2之间的对合距离以改善反流。
在一些实施例中,中空套400的侧壁410被该对夹合器200部分地夹扁。虽然图4e和图4f中没有示出防反流器300,但应理解,在中空套400的远端414固定到弹力臂240的近侧部242的第二端247且弹力臂240的远侧部244的第一端248固定到杆110的远端114的情况下,弹力臂240朝向杆100的偏转是通过中空套400的远向移动实现的。相应地,若中空套的近端412固定到防反流器300,则中空套400的远向移动也将同时使防反流器300远向移动并实质上贴靠在被夹合的瓣叶v1、v2的左心房侧。也就是说,在以上参考图4c-4e描述的准备捕捉瓣叶、捕捉瓣叶和夹合瓣叶过程中的每一者期间,防反流器300都可以仍收缩在介入输送器械内,也可以已经从介入输送器械伸出并展开且位于夹合器200的近侧。这可以取决于夹合器200、防反流器300和可选的中空套400之间的具体连接配置。
81.图5a示出了图示根据本技术的实施例的瓣膜修复装置3000的治疗效果在瓣膜平面中的俯视图,其中出于图示目的省略了防反流器300的图示。图5b示出了根据本技术的实施例的瓣膜修复装置的治疗效果沿图5a中的虚线截取的侧视截面图。如图5a所示,由于一对夹合器200之间被中空套400隔开,因此一对瓣叶v1、v2之间的对合距离虽然被夹合器200缩小,但并非被完全夹合到如图1a所示的接触面积较小的线性夹合,而是在瓣叶v1、v2之间仍保留一定的间距。因此,在瓣膜打开状态下,与用常规瓣膜修复装置1000将瓣叶v1、v2完全夹合在一起在瓣膜平面上所产生的张开角度和方向的相比(如俯视图1a所示),采用根据本技术的瓣膜修复装置3000修复的瓣叶v1、v2在瓣膜平面中产生的张开角度和方向更接近自然状态(如俯视图5a所示)。
82.在一些实施例中,如图4f所示,一对夹合器200向杆100偏转的弹力使中空套400的侧壁410部分地被压扁,形成俯视图4f中的椭圆形截面。在此情况下,中空套400的椭圆形的截面形状可以增大中空套400与至少两个夹合器200之间的接触面积,从而改善夹合的稳定性。
83.图4g示出了根据本技术的实施例的瓣膜修复装置3000在将防反流器300设置就位的状态下的侧视图。在与中空套400分开地控制防反流器300沿纵向轴线的远向移动的情况下,在图4e-图4f所示的阶段之后(即用夹合器200将瓣叶v1、v2夹合固定后),如图4g所示,将防反流器300远向移动,如图4g中的箭头f所示,以贴靠在二尖瓣的左心房侧。图4h示出了根据本技术的实施例的瓣膜修复装置在将防反流器设置就位的状态下的俯视图,其中出于图示目的省略了瓣膜的图示。如示意性侧视截面图5b所示,通过使防反流器300贴靠在二尖瓣的左心房侧(即图5b中的上侧),可以抑制瓣叶v1、v2向左心房侧过度运动,从而降低治疗后二尖瓣反流中远期复发的风险。
84.以二尖瓣为例,在植入根据本技术的包含防反流器300的瓣膜修复装置3000之后,当心脏舒张期时(心房收缩且心室舒张时),左心房侧的血液压力大于左心室侧,且由夹合器200夹合瓣叶v1、v2形成的两个“o”形开口打开,如图5a所示。在此情况下,在上述正向压力差的作用下,正常血流可以沿着防反流器300的漏斗形形状的外侧自近侧远向地(即,从左心房到左心室方向)从瓣膜修复装置3000的径向中心向外围流动,如图5b中的箭头g所示。由于防反流器300近侧的截面积较小,从而正常血流受到较小的反方向的阻力,而防反流器300通过其漏斗形形状对正常血流起到“导流”作用,使正常血流“顺着”防反流器300流向远端。进而,“顺着”防反流器300的上述正常血流可以通过打开的两个“o”形开口流往左心室。
85.相比之下,当心脏收缩期时(心房舒张且心室收缩时),左心房侧的血液压力小于左心室侧。因此,在该逆向压力差的作用下瓣叶闭合,由夹合器200夹合瓣叶形成的两个“o”形开口闭合。此时,如果仅凭借夹合器200无法实现两个“o”形开口的完美闭合,则血液在上述逆向压力差的作用下将倾向于发生反流,即从左心室通过瓣膜反流回左心房。通常,反流量在靠近瓣膜中心位置处较大,而在靠近瓣膜两侧(pc、ac)的反流量相对较少。在此情况下,由于瓣膜修复装置3000通常植入在瓣膜中心位置附近,因此反流血流主要集中在防反流器300的覆盖范围内。当反流血流自防反流器300的远侧近向地(即,从左心室到左心房方向)流动时(未示出),由于防反流器300的漏斗形渐缩形状,防反流器300的远端所覆盖的截面积较大,处于瓣膜中心位置的反流血流(即大部分反流血流)因受到防反流器300的阻挡而无法绕过防反流器300流至防反流器300的近侧,从而使左心室侧的血流无法反流回左心房,实现有效的防反流,使心脏瓣膜应有的功能得到显著恢复。
86.由上可见,血液正常“顺着”根据本技术的防反流器300远向流动时所受的阻力远小于反流血液试图近向流动通过防反流器300的阻力。因此,包含防反流器300的瓣膜修复装置3000在不实质上增大正常远向血流的阻力的情况下,可以对反流(即近向血流)提供附加的阻力,从而减轻或消除了反流。此外,在防反流器300与瓣叶发生内皮化之后,瓣叶与防反流器300逐渐生长为一体,从而可以进一步改善瓣叶的对合效果,从而促进中远期的治疗效果。
87.此外,如图5b所示,在一对夹合器200将瓣叶夹合之后,在夹合力的作用下,中空套400在该对夹合器200之间的部分可以被挤压为近侧宽远侧窄的形状,使得该对夹合器200的近侧距离远于远侧距离。换言之,该对夹合器200的各自的弹力臂240的远侧部244的第二端246之间的距离可以大于该对夹合器200的各自的弹力臂240的远侧部244的第一端248之间的距离。相应地,如图5b所示,瓣叶v1、v2在夹合位点s1’、s2’处受到夹合器200的牵拉角度θ2为较圆润的钝角,与自然状态的瓣膜的形状更为接近,而不会形成如图1b所示的接近90
°
的牵拉角度θ1。由于能够减轻或避免瓣叶v1、v2和腱索等相关组织的过度拉伸和损伤,根据本技术的瓣膜修复装置3000可以改善中长期治疗效果并防止反流的复发。
88.应理解,虽然以上可能参考二尖瓣反流的治疗描述了根据本技术的瓣膜修复装置3000的植入操作和有利效果,但这些操作和效果同样适用于治疗其他瓣膜反流,诸如三尖瓣、主动脉瓣、肺动脉瓣、上下腔静脉瓣等。
89.应理解,可以对所公开的装置进行各种修改。因此,以上描述不应理解为限制,而仅是本公开的实施例的举例。本领域技术人员将设想到在本公开的范围和精神内的其他修改。例如,一个所描述的实施例的任意和全部特征可以适当地整合到另一实施例中,并且该特征在一个实施例中的有益效果可以预期在另一实施例中实现。