1.本发明涉及足底压力分析技术领域,特别涉及一种足底压力分布图获取方法。
背景技术:
2.足底压力是人体在静止站立或者动态行进时,在自身重力的作用下,足底在垂直方向上受到的一个地面的反作用力。足底压力分布能反映下肢乃至全身的生理、结构和功能等方面的信息,当下肢功能及足内结构轻微变化时,都将改变足底压力负荷的分配,可见对足底压力进行监测具有重要意义。
3.不正常的站立姿态及步态会从足底压力分布上反应出来。通过压力传感器可以采集到足底压力数据,目前拥有采集足底压力的压力垫的价格在1万元左右,价格昂贵,压力垫每平方厘米分布的压力点个数约为2个,整个压力垫传感器分布的点约为2000至3000个左右。
4.而如何通过少量的压力传感器即可准确的活动足底压力分布情况,以降低用户成本,是还有待解决的技术难题。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种足底压力分布图获取方法,以解决采用少量传感器准确获得足底压力分布情况的技术问题。
6.本发明足底压力分布图获取方法包括以下步骤:
7.1)通过3d扫描得到脚掌3d模型,导出整个脚掌到投影平面的高度信息d,然后找到脚掌的最高点max(δd)和最低点min(d),最后计算得到得高度信息的极差r和整个脚掌与最低点之间的距离δd;
[0008][0009]
r=max(δd)-min(δd),
[0010][0011]
2)通过设置于鞋垫上的分布式压力传感组件采集脚底的压力数据,所述分布式压力传感组件包括:用于测前脚掌压力的薄膜压力传感器、用于测足弓侧部压力的薄膜压力
传感器和用于测脚后跟压力的薄膜压力传感器;
[0012]
所述用于检测前脚掌压力的薄膜压力传感器分别为第一薄膜压力传感器、第二薄膜压力传感器、第三薄膜压力传感器和第四薄膜压力传感器,第一薄膜压力传感器、第二薄膜压力传感器和第三薄膜压力传感器沿斜直线均匀分布;在脚放置在鞋垫上的情况下,所述斜直线平行于第五脚趾根部和大脚趾根部的连线,所述第四薄膜压力传感器位于第二薄膜压力传感器和第三薄膜压力传感器之间位置的前方,且第四薄膜压力传感器位于第二脚趾根部的后方;
[0013]
所述用于检测足弓侧部压力的薄膜压力传感器为第五薄膜压力传感器,在脚放置在鞋垫上的情况下,第五薄膜压力传感器位于足弓外侧的中部;
[0014]
所述用于检测脚后跟压力的薄膜压力传感器分别为第六薄膜压力传感器、第七薄膜压力传感器和第八薄膜压力传感器;在脚放置在鞋垫上的情况下,第六薄膜压力传感器和第七薄膜压力传感器沿脚跟横向布置,第六薄膜压力传感器靠近脚跟外侧边部,第七传感器靠近脚跟内侧边部;第八薄膜压力传感器位于第六薄膜压力传感器的前方且靠近脚跟外侧边部,或者第八薄膜压力传感器位于第七薄膜压力传感器的前方且靠近脚跟内侧边部;
[0015]
3)对各薄膜压力传感器采集的数据进行滤波处理消除高频信号;
[0016]
4)根据正常人体重范围设计的压力测量范围为200kg,转换到电学测量为4096个压力等级,得到根据高度信息的衰减系数m,m=4096/r;
[0017]
5)根据如下公式计算足底压力未知点a
xy
的压力b
xy
,下标x=1,2,......n,y=1,2,......n;
[0018]bxy
=((b1
ij-m*(δd1
ij-δd
xy
)+(b2
ij-m*(δd2
ij-δd
xy
))+(b3
ij-m*(δd3
ij-δd
xy
))+(b4
ij-m*(δd4
ij-δd
xy
))+(b5
ij-m*(δd5
ij-δd
xy
))+(b6
ij-m*(δd6
ij-δd
xy
))+(b7
ij-m*(δd7
ij-δd
xy
))+(b8
ij-m*(δd8
ij-δd
xy
)))/8
[0019]
将与八个薄膜压力传感器对应的足底检测点分别命名为a1
ij
、a2
ij
、a3
ij
、a4
ij
、a5
ij
、a6
ij
、a7
ij
和a8
ij
,上式中b1
ij
为a1
ij
点处的压力,b2
ij
为a2
ij
点处的压力,b3
ij
为a3
ij
点处的压力,b4
ij
为a4
ij
点处的压力,b5
ij
为a5
ij
点处的压力,b6
ij
为a6
ij
点处的压力,b7
ij
为a7
ij
点处的压力,b8
ij
为a8
ij
点处的压力;
[0020]
上式中将δd1
ij
为a1
ij
点和最低点之间的距离,δd2
ij
为a2
ij
点和最低点之间的距离,δd3
ij
为a3
ij
点和最低点之间的距离,δd4
ij
为a4
ij
点和最低点之间的距离,δd5
ij
为a5
ij
点和最低点之间的距离,δd6
ij
为a6
ij
点和最低点之间的距离,δd7
ij
为a7
ij
点和最低点之间的距离,δd8
ij
为a8
ij
点和最低点之间的距离;
[0021]
6)在得到足底所有点的压力后,将各点的压力值映射为灰度值,再将灰度映射结果做rgb映射,得到足底压力云图。
[0022]
本发明的有益效果:
[0023]
本发明足底压力分布图获取方法,其通过设计合理的薄膜压力传感器分布结构,再结合特定的算法,使得只采用8个薄膜压力传感器即可得到整个足底相对准确的压力分布情况。并且本方法通过将足底各点压力值先映射为灰度图像,再映射为rgb图像,即得到了彩色的足底压力云图,方便了用户直观的了解足底压力分布。本发明足底压力分布图获取方法相对于现有密集布置压力传感器检测足底压力分布情况而言,其成本更低,且分布
式压力传感组件设置在鞋垫上能实时监测用户足底压力分布情况,实用性更强。
附图说明
[0024]
图1为通过3d扫描得到的脚掌3d模型;
[0025]
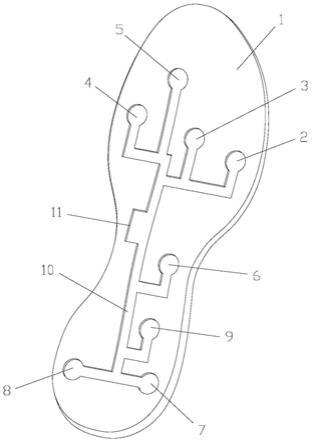
图2为分布式压力传感组件设置于鞋垫的一种实施示意图;
[0026]
图3为分布式压力传感组件设置于鞋垫的另一种实施示意图;
[0027]
图4为原始数据波形图;
[0028]
图5为滤波处理后的数据波形图;
[0029]
图6为原始数据频谱图;
[0030]
图7为滤波处理后的数据频谱图;
[0031]
图8为原始数据波形和滤波结果对比图;
[0032]
图9为映射为灰度图的足底压力云图。
具体实施方式
[0033]
下面结合附图和实施例对本发明作进一步描述。
[0034]
本实施例足底压力分布图获取方法包括以下步骤:
[0035]
1)通过3d扫描得到脚掌3d模型,导出整个脚掌到投影平面的高度信息d,然后找到脚掌的最高点max(δd)和最低点min(d),最后计算得到得高度信息的极差r和整个脚掌与最低点之间的距离δd;
[0036][0037]
r=max(δd)-min(δd),
[0038][0039]
2)通过设置于鞋垫1上的分布式压力传感组件采集脚底的压力数据,所述分布式压力传感组件包括:用于测前脚掌压力的薄膜压力传感器、用于测足弓侧部压力的薄膜压力传感器和用于测脚后跟压力的薄膜压力传感器。
[0040]
所述用于检测前脚掌压力的薄膜压力传感器分别为第一薄膜压力传感器2、第二薄膜压力传感器3、第三薄膜压力传感器4和第四薄膜压力传感器5,第一薄膜压力传感器、第二薄膜压力传感器和第三薄膜压力传感器沿斜直线均匀分布;在脚放置在鞋垫上的情况下,所述斜直线平行于第五脚趾根部和大脚趾根部的连线,所述第四薄膜压力传感器位于第二薄膜压力传感器和第三薄膜压力传感器之间位置的前方,且第四薄膜压力传感器位于
第二脚趾根部的后方。
[0041]
所述用于检测足弓侧部压力的薄膜压力传感器为第五薄膜压力传感器6,在脚放置在鞋垫上的情况下,第五薄膜压力传感器位于足弓外侧的中部。
[0042]
所述用于检测脚后跟压力的薄膜压力传感器分别为第六薄膜压力传感器7、第七薄膜压力传感器8和第八薄膜压力传感器9;在脚放置在鞋垫上的情况下,第六薄膜压力传感器和第七薄膜压力传感器沿脚跟横向布置,第六薄膜压力传感器靠近脚跟外侧边部,第七传感器靠近脚跟内侧边部。第八薄膜压力传感器位于第六薄膜压力传感器的前方且靠近脚跟外侧边部,第八薄膜压力传感器这种布置方式适于正常或偏外八字脚的人。或者第八薄膜压力传感器位于第七薄膜压力传感器的前方且靠近脚跟内侧边部,第八薄膜压力传感器这种布置方式适于偏内八字脚的人。
[0043]
在具体实施中,如图1和图2所示,单个鞋垫中集成了八个薄膜压力传感器,第一薄膜压力传感器、第二薄膜压力传感器、第三薄膜压力传感器、第四薄膜压力传感器、第五薄膜压力传感器、第六薄膜压力传感器、第七薄膜压力传感器和第八薄膜压力传感器设置在柔性电路板10上,且柔性电路板上设置有输出压力数据的type-c接口11。
[0044]
3)对各薄膜压力传感器采集的数据进行滤波处理消除高频信号。当薄膜压力传感器受力时,其电阻率就会发生变化,通过恒压检测电路之后,压力的变化就会变成电压值的变化。再通过单片机stm32(当然也可采用其它型号的处理器)的模数转换器对传感器的电压进行采集。由于adc采集得到的压力数据还包含着许多随机噪声的影响,所以首先要对数据进行滤波处理,原始数据波形如图4所示,原始数据频谱如图6所示。
[0045]
由图4和图6可知原始数据波形中存在较多的高频信号干扰但幅度相对较弱,所以本实施例中使用对算力要求低且方便快速的巴特沃斯(butterworth)低通滤波器即可实现对数据的处理。低通滤波器的主要性能指标有以下几个:通带截止频率fp、阻带截止频率fs、通带衰减(ap)、阻带衰减(as)以及归一化频率时需要用到的-3db的转折频率fc。
[0046]
巴特沃斯滤波器只需要两个参数表征,滤波器的阶数n和-3db处的截止频率ωc。其幅度平方函数为:
[0047][0048][0049]
n是滤波器的阶数,从幅度平方函数可以看出,n阶滤波器有2n个极点,而且这2n个极点均布在一个圆上,圆的半径为,称之为butterworth圆,巴特沃斯滤波器系统是一个线性系统,要使其稳定,其极点必须位于s平面的左半平面,所以取左半平面内的n个极点作为滤波器的极点,滤波器就是稳定的了,求出极点之后,计算模拟滤波器的系数as、bs,然后通过双线性变换由模拟域到数字域,求出系数az和bz。最后通过差分方程就可以计算滤波结果了。
[0050][0051]
根据正常人在健走时的步频在100~120/分钟,步频在2hz左右,考虑到存在跑步
的可能性,并且需要保证目标频率完全处于通带平坦区域内,所以本实施例中设计的滤波器截至频率为40hz。通过matlab滤波器设计工具箱,得到数字滤波器的参数指标如下。
[0052]
bz=[0.0013,0.0064,0.0128,0.0128,0.0064,0.0013];
[0053]
az=[1.0000,-2.9754,3.8060,-2.5453,0.8811,-0.1254];
[0054]
最后使用该滤波器对步频信号处理得到的结果如图5、图7和图8所示,从图中可以看出高频信号已经基本得到了滤除。
[0055]
4)根据正常人体重范围设计的压力测量范围为200kg,转换到电学测量为4096个压力等级,得到根据高度信息的衰减系数m,m=4096/r;
[0056]
5)根据如下公式计算足底压力未知点a
xy
的压力b
xy
,下标x=1,2,......n,y=1,2,......n;
[0057]bxy
=((b1
ij-m*(δd1
ij-δd
xy
)+(b2
ij-m*(δd2
ij-δd
xy
))+(b3
ij-m*(δd3
ij-δd
xy
))+(b4
ij-m*(δd4
ij-δd
xy
))+(b5
ij-m*(δd5
ij-δd
xy
))+(b6
ij-m*(δd6
ij-δd
xy
))+(b7
ij-m*(δd7
ij-δd
xy
))+(b8
ij-m*(δd8
ij-δd
xy
)))/8
[0058]
将与八个薄膜压力传感器对应的足底检测点分别命名为a1
ij
、a2
ij
、a3
ij
、a4
ij
、a5
ij
、a6
ij
、a7
ij
和a8
ij
,上式中b1
ij
为a1
ij
点处的压力,b2
ij
为a2
ij
点处的压力,b3
ij
为a3
ij
点处的压力,b4
ij
为a4
ij
点处的压力,b5
ij
为a5
ij
点处的压力,b6
ij
为a6
ij
点处的压力,b7
ij
为a7
ij
点处的压力,b8
ij
为a8
ij
点处的压力;
[0059]
上式中将δd1
ij
为a1
ij
点和最低点之间的距离,δd2
ij
为a2
ij
点和最低点之间的距离,δd3
ij
为a3
ij
点和最低点之间的距离,δd4
ij
为a4
ij
点和最低点之间的距离,δd5
ij
为a5
ij
点和最低点之间的距离,δd6
ij
为a6
ij
点和最低点之间的距离,δd7
ij
为a7
ij
点和最低点之间的距离,δd8
ij
为a8
ij
点和最低点之间的距离,由于已知δd,因此δd1
ij
、δd2
ij
、δd3
ij
、δd4
ij
、δd5
ij
、δd6
ij
、δd7
ij
和δd8
ij
已知。
[0060]
具体的,假设八个薄膜压力传感器的检测点的压力值分别为b
13
,b
23
,b
24
,b
25
,b
56
,b
78
,b
84
,b
89
,待计算的点为b
33
,则:
[0061][0062]
计算出足底所有点的压力后可得到足底压力矩阵
[0063]
6)得到足底所有点的压力后,将各点的压力值映射为灰度值,再对灰度映射结果做rgb映射,得到足底压力云图。
[0064]
由于在实时观察足底压力变化时,上位机会接收大量的瞬态数据,然而大量数据的变化对人体的视觉来说并不敏感。为了让人眼对变化的数据更直观,本实施例将不同点的压力值转换为颜色,形成压力云图,这样用户就可以实时直观的观察足底压力变化情况。
[0065]
本实施例中采用的12位adc,所以足底每个薄膜压力传感器的测量输出值为0~4095。首先对数值进行灰度映射,灰度值一般的范围为0~255,它表示黑白图像中点的颜色
深度,黑色为0,白色为255。为了将测量输出值映射为灰度值,需要将测量输出值先左移4位,再右移8位,即将0~4095线性映射为0~255。人的眼睛对灰度的区分度只有几十个级别,对色彩的色度和亮度的辨别度却能达到上千种。人在观察黑白图像时,相邻像素的灰度值之间的细微差别是很难观察出来的,但是若将这些灰度像素附上颜色,人在观察图像像素之间差别的能力也就大大提高,所以需要对上述灰度映射结果再做一个rgb映射。
[0066]
rgb色彩模式中,r、g、b各自表示红色、绿色、蓝色三个颜色通道,通过这三个通道的颜色变化和通道之间颜色的相互叠加来得到各种各样的颜色,它是工业界的一种目前运用最广泛的颜色标准,几乎涵盖了人类视觉所能感知的所有颜色,它的强度值也为0~255,一共256个亮度等级。
[0067]
本实施例采用伪彩色技术来实现rgb映射。伪彩色技术是通过一定的规则将黑白图像不同灰度大小的像素给予不同的色彩,它是一种图像增强的有效措施。
[0068]
变换法是一种常用的伪彩色技术映射方法。它的基本原理是将rgb三种颜色线性组合,这样连续灰度值的颜色也是连续的。rgb色彩模式告诉我们自然界各种各样的颜色都可由r、g、b三个通道的颜色变化和通道之间颜色的相互叠加来实现。假设原始黑白图像像素点的灰度值f(x,y)用表示,用下式表示红色、绿色、蓝色相对于不同灰度值的独立转换关系:
[0069][0070][0071][0072]
将每一个点的灰度等级按上述公式进行处理,黑白图像不同像素的灰度值就转变为红色、绿色、蓝色的不同组合,也就转换为不同的色彩。
[0073]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。