1.本实用新型涉及康复训练装置技术领域,尤其涉及一种基于平面四杆机构的康复训练装置。
背景技术:
2.随着生活节奏的日益加快,越来越多人的身体处于亚健康状态,诸如中风之类的疾病已经开始由老年人转向年轻人,一旦中风,轻者出现言语笨拙、流涎以及饮水呛咳等症状,重者出现四肢偏瘫等症状,在药物治疗的同时需要辅助进行康复训练,以利于康复者身体各方面机能恢复,而在进行康复训练时康复者需要外人协助起身,同时需要外人长时间为康复者提供支撑,否则易出现站立不稳,甚至摔倒的情况。
3.且随着老龄化人口的增加,老年人身体各方面机能存在不同程度的退化,同时由于年龄的增长逐渐出现个子变矮、腰腿的骨质增生、手脚无力,在从事弯腰、大幅度低头及由坐姿恢复正常体位等动作时,身体躯干血液快速流动,脑部发生贫血,易出现两眼发黑,站立不稳,甚至摔倒的情况。
技术实现要素:
4.本实用新型所解决的技术问题在于提供一种基于平面四杆机构的康复训练装置,以解决上述背景技术中的问题。
5.本实用新型所解决的技术问题采用以下技术方案来实现:
6.基于平面四杆机构的康复训练装置,包括机架、启动杆、起身平面四杆机构、座椅、支撑上连杆、支撑下连杆、踏步板、呼叫器及伸缩带,其中,所述机架前端对称设置有用于安装导向轮的安装架,所述机架后端对称安装有用于支撑机架的支撑轮,并在位于安装架后侧的机架上设置有起身平面四杆机构,所述起身平面四杆机构由两对起身上连杆与起身下连杆组成,所述起身上连杆与起身下连杆的一端安装在机架外侧,所述起身上连杆与起身下连杆的另一端安装在启动杆上,所述座椅的底座安装在启动杆上端,所述启动杆下端设置有踏步板,所述扶手对称设置在座椅两侧并固定在启动杆上,所述呼叫器设置在扶手上;所述座椅背面设置有用于进行上肢训练的支撑上连杆与支撑下连杆;同时在座椅的底座上设置有与机架可伸缩连接的伸缩带。
7.在本实用新型中,所述安装架上安装有斜叉,所述导向轮安装在斜叉上。
8.在本实用新型中,所述支撑轮为带有刹车功能的支撑轮。
9.在本实用新型中,所述扶手由安装段、把握段、支撑段及折弯段组成,所述安装段固定在连杆上,所述把握段为弧形结构,所述支撑段嵌套有橡胶套,所述呼叫器设置在把握段上部。
10.在本实用新型中,所述踏步板上设置有防滑垫,用于防滑。
11.在本实用新型中,所述座椅底部设置有调节旋钮,通过调节旋钮调整靠背倾角,从而适应不同使用者的个性化需求。
12.有益效果:本实用新型采用平面四杆机构模拟人体坐起运动,通过踏步板带动启动杆进而带动起身平面四杆机构运动以实现下肢康复训练,座椅背面设置有用于进行上肢训练的支撑上连杆与支撑下连杆,使用者能够独自操作完成康复训练,彻底改变需要外人帮助的缺点,且操作中不需要过度弯腰等动作,最大程度避免使用者训练中出现摔倒等状况。
附图说明
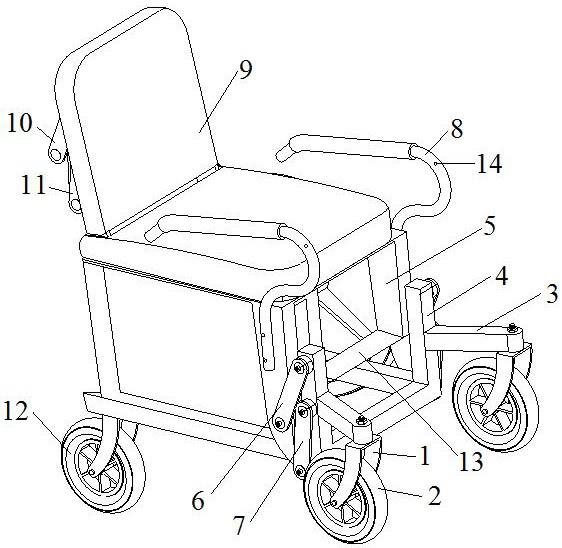
13.图1为本实用新型的较佳实施例的结构示意图。
14.图2为本实用新型的较佳实施例中的人体下肢数学模型示意图。
15.图3为本实用新型的较佳实施例中的臀部轨迹示意图。
16.图4为本实用新型的较佳实施例中的座椅处于升起位置时起身平面四杆机构状态示意图。
17.图5为本实用新型的较佳实施例中的座椅处于初始位置时起身平面四杆机构状态示意图。
具体实施方式
18.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
19.参见图1的基于平面四杆机构的康复训练装置,包括斜叉1、导向轮2、安装架3、机架4、启动杆5、起身上连杆6、起身下连杆7、扶手8、座椅9、支撑上连杆10、支撑下连杆11、支撑轮12、踏步板13、呼叫器14及伸缩带15,其中,所述机架4前端对称设置有安装架3,所述安装架3上通过斜叉1安装导向轮2,所述机架4后端对称安装有用于支撑机架4的支撑轮12,并在位于安装架3后侧的机架4上设置有起身平面四杆机构,所述起身平面四杆机构由两对起身上连杆6与起身下连杆7组成,所述起身上连杆6与起身下连杆7的一端安装在机架4外侧,所述起身上连杆6与起身下连杆7的另一端安装在启动杆5上,所述座椅9的底座安装在启动杆5上端,所述启动杆5下端设置有踏步板13,所述扶手8对称设置在座椅9两侧并固定在启动杆5上,所述呼叫器14设置在扶手8上;所述座椅9背面设置有用于进行上肢训练的支撑上连杆10与支撑下连杆11;同时在座椅9的底座上设置有与机架4可伸缩连接的伸缩带15。
20.在本实施例中,所述支撑轮12为带有刹车功能的支撑轮。
21.在本实施例中,所述扶手8由安装段、把握段、支撑段及折弯段组成,所述安装段固定在连杆8上,所述把握段为弧形结构,所述支撑段嵌套有橡胶套,所述呼叫器14设置在把握段上部。
22.在本实施例中,所述踏步板13上设置有防滑垫,用于防滑。
23.在本实施例中,所述座椅9底部设置有调节旋钮,通过调节旋钮调整靠背倾角,从而适应不同使用者的个性化需求。
24.在本实施例中,通过分析人体从坐着到站立的原则是人体利用肌肉的力量克服重力的影响,并将身体的重心向上移动,从而提高人体的重心,直至人体平稳站立的一个过程,坐起动作的准备阶段、发力阶段、上升阶段,发现第一、第二阶段重点是找重心和肌肉发力做功,此时是最需要助力和帮助,由此只需考虑下肢运动而上半身起稳定中心作用,简化
人体下肢数学模型如图2所示,a为裸关节,b为膝关节,c为髋关节,(xa,ya)为a点的坐标,也为原点坐标(0,0),b点坐标为(xb,yb),c点坐标为(xc,yc),θ1是脚裸处小腿与铅垂线的角度,θ2是髋关节与铅垂线小于90度的夹角,在运动轨迹中,只需知道坐起阶段每个时间点上的大腿与水平线的角度α=90
°‑
θ2,在建立起这个简化数学模型后可以开始记录运动的轨迹:
25.xb=l1·
sinθ1ꢀꢀꢀ
(1)
26.yb=l1·
cosθ1ꢀꢀꢀ
(2)
27.xc=l1·
sinθ
1-l2·
sinθ2ꢀꢀꢀ
(3)
28.yc=l1·
cosθ1+l2·
cosθ2ꢀꢀꢀ
(4)
29.由式(1~4)可知,l1为a到b的距离,l2为b到c的距离,在l1与l2一定及在同一个人的情况下臀部运动轨迹与θ1、θ2有关,故要首先研究人坐起过程中θ1、θ2的变化过程,由于坐起整个过程变化比较复杂,θ1、θ2的角速度无法取一个平均速度进行计算,需进行采样直接测量角度与臀部轨迹,获取臀部的轨迹要先对不同时刻的θ1、θ2进行测量,而测量θ1、θ2的角度本次依靠图像分析的方法:
30.首先,在被测者的裸关节、膝关节和髋关节上贴上标识用白纸,用于后期描点测量角度,而后让被测者进行一个周期为5s的起立时间,再插入多个中断点,并对中断点进行分析,按照建立的简化数学模型进行角度测量;根据中国成年人人体尺寸标准gb10000-88,选定老年人对应的l1为369mm,l2为457mm,将选定的l1、l2、θ1、θ2代入公式(3)和公式(4)中计算所得每个时间点的臀部坐标:
31.表1坐起过程中臀部的坐标随时间变化表
[0032][0033]
将得到的坐标点用折线相连得到臀部轨迹图,如图3所示,可以看到第一个点到第三个点是属于人体坐起阶段的第一阶段,是坐起过程的准备阶段;第三个点到第六个点是坐起过程中最重要的阶段,也是帮助使用者起身的主要运动阶段,故本实施例中设置起身平面四杆机构,使用者使用时,双手扶住扶手8的把握段,采用一只脚踏在踏步板13上,踏步板13在使用者重力作用下,带动启动杆5进而带动起身平面四杆机构运动进行下肢训练,座椅9缓缓升起直至伸缩带15绷紧,如图4所示,起身上连杆6与机架4的受力点为d,起身下连杆7与机架4的受力点为g,起身上连杆6与启动杆5的受力点为h,起身下连杆7与启动杆5的
受力点为i,启动杆5与伸缩带15的受力点为e,伸缩带15与机架4的受力点为f;使用者放下脚,踏步板13缓慢下移,起身平面四杆机构恢复初始位置,伸缩带15放松,如图5所示;当使用者需要进行上肢训练时,可绕至座椅9靠背后利用支撑上连杆10与支撑下连杆11进行上肢训练;在训练过程中出现突发事件,可通过呼叫器14呼叫寻求帮助。