1.本实用新型属于体育运动器械技术领域,尤其是一种机械臂式前庭训练装置。
背景技术:
2.前庭系统是感觉系统之一,掌管人体平衡感,主要功能是侦测地心引力,当个体进行加速或减速活动时,前庭系统会调整头部倾斜的位置,以维持身体的平衡,在撞到东西或跌倒时能够及时反应,保护身体。此外,前庭系统还有改善其他神经系统的功能。在航空、航天、航海等领域,由于工作环境的特殊性,为了避免出现眩晕等现象,工作人员需要使用该装置进行前庭功能和抗眩晕训练,提高身体素质,以达到适应工作环境要求的目的。
3.目前,比较常用的前庭训练装置是二维滚轮,经典的二维滚轮是通过在二维平面内达到一定转速,被动提升人体前庭稳定性以及抗眩晕能力。
4.一种封闭式三维前庭训练装置(cn210612479u),包括支架、外侧环、中间环和内侧环,在初始状态下,三个旋转环处于同圆心、同平面状态。支架与外侧环、外侧环与中间环、中间环与内侧环分别通过转动副相连接,内侧环在中间环内的旋转轴线与中间环在外侧环内的旋转轴线成90度角。中间环在外侧环内的旋转轴线与外侧环在支架内的旋转轴线成45度角。外侧环、中间环和内侧环直径依次缩小,在内侧环上安置安全装置。本装置通过多维度旋转,能够模拟高速、复杂转向、加减g等飞行运输实际环境,使训练更贴近工作实际要求,更贴合复杂环境所需求的前庭耐受和适应能力。
5.一种可调节的运动人体前庭训练器(cn110575347a),包括支撑底座,辅助板,第一轴承,安装壳,可调速电动机,减速器,第二轴承,外侧环,插接轴,第一转动副,中间环,第二转动副,内侧环,横向杆,plc,开关,固定座椅结构,支撑座,测试长板结构和支撑移动架结构,所述的辅助板焊接在支撑底座上表面的左侧;所述的第一轴承镶嵌在辅助板内部的上侧;所述的安装壳焊接在支撑底座上表面的右侧。本发明的有益效果为:通过固定座椅结构的设置,使用过程中,能够方便快速的使固定带套在测试人员的身体上,且随之配合插扣固定住,进而方便快速的进行固定或者拆下,且随之进行使用。
6.一种单动力驱动空间运动人体前庭训练器(cn106530883a),包括底座、固定设置于底座上的圆环支架、枢转铰接于底座上的第一摇杆以及枢转铰接于圆环支架上的第二摇杆和连接于第一摇杆与第二摇杆间的座椅,座椅上设置有驱动座椅转动的驱动装置,圆环支架上设置有两条圆弧形第一滑槽,第一滑槽上设置有沿第一滑槽滑动后固定在圆环支架上的第一滑轨,第一摇杆可枢转的连接在第一滑轨上,第二摇杆上设置有圆弧形第二滑槽,第二滑槽上设置有沿第二滑槽滑动后固定在第二摇杆上的第二滑轨,座椅一端与第二滑轨转动的连接,另一端与第一摇杆可转动连接。本发明的方案通过控制驱动装置,来实现模拟不同轨迹的空间运动,同时对运动轨迹和强度进行调节。
7.检索并对比以上现有技术及已公开专利文献,现有的训练装置由于旋转方式及动力控制分别存在不同的限制,在训练中模拟工作环境程度存在不足,因此抗眩晕能力的训练仍存需改进。
技术实现要素:
8.本实用新型的目的在于克服现有技术的不足之处,提供一种结构简单、设计合理、应用性强的机械臂式前庭训练装置。
9.本实用新型解决其技术问题是采取以下技术方案实现的:
10.一种机械臂式前庭训练装置,其特征在于:包括机械臂以及座椅,机械臂的活动端连接座椅背部,座椅安装有五点式安全带。
11.而且,座椅采用包裹型座椅结构,座椅包括坐板、靠背、头枕、头部挡板以及肩部挡板,坐板后端上部制有靠背,靠背上端中部制有头枕,在头枕横向两侧对称制有倾斜向前延伸的头部挡板;在靠背上部横向两侧对称制有倾斜向前延伸的肩部挡板;在训练人员能够接触的座椅内层包覆安装有缓冲垫层。
12.而且,机械臂包括基座、第一转动臂、第二转动臂、第三转动臂、第四转动臂以及第五转动臂,基座上端同轴转动安装第一转动臂,第一转动臂由对应的电机控制能够进行水平方向自转;第一转动臂的径向一侧铰装第二转动臂的一端,第二转动臂由对应的电机控制能够进行竖直平面内的转动;第二转动臂的另一端铰装第三转动臂的一端,第三转动臂由对应的电机控制进行转动;第三转动臂的另一端同轴安装第四转动臂的一端,第四转动臂能够在对应的电机驱动下进行同轴转动;第四转动臂的另一端铰装第五转动臂的一端,第五转动臂的另一端固定连接座椅的后端中部。
13.而且,第四转动臂的一端为圆柱形结构,第四转动臂的另一端为间隔对称设置的双层支撑板,该双层支撑板之间垂直安装有第五转动臂转轴,第五转动臂转轴中部径向一侧固装座椅连接杆,座椅连接杆的另一端固装座椅;机械臂的基座径向一侧安装有电控箱。
14.本实用新型的优点和积极效果是:
15.1、本装置采用多自由度的多轴摆臂式机器人与座椅结合,使训练中人员的重心位置、移动角度、转动方向、速度均可控制、可调节,能够更加有效的模拟高速、复杂转向、加减g等飞行运输环境,使训练贴近工作环境实际要求,更贴合复杂环境所需要的前庭耐受和适应能力,提供高强度高水准的训练干预措施。
16.2、本装置安全可靠,采用包裹型安全座椅,座椅配备五点式安全带,保证训练中人员的安全性,有效避免不必要的损伤,保证训练安全性。
17.3、本装置便于控性,可以根据学员的程度控制训练强度,调节运动速度以及运动姿态,降低训练恐惧感,循序渐进进行教学训练,提升教学训练效果。
18.4、本装置可广泛应用于航空、航天、民航飞行专业、空乘、空保与飞行运输直接相关的空勤类专业,也可应用至军航飞行员训练、航海航运等专业训练,可用于上述专业的体育教学、身体锻炼、体能训练实践以及体能测试与实验等工作中。
附图说明
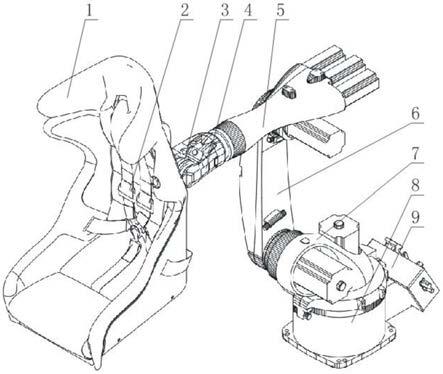
19.图1为本装置的立体结构示意图;
20.图2为本实用新型主视图;
21.图3为图2的俯视图;
22.图4为本装置另一角度的立体结构示意图。
具体实施方式
23.下面结合附图并通过具体实施例对本实用新型作进一步详述,以下实施例只是描述性的,不是限定性的,不能以此限定本实用新型的保护范围。
24.一种机械臂式前庭训练装置,包括机械臂以及座椅1,机械臂采用多自由度机器人结构,机械臂的活动端连接座椅背部,座椅安装五点式安全带2;座椅采用包裹型座椅结构,座椅包括坐板1-5、靠背1-4、头枕1-1、头部挡板1-2以及肩部挡板1-3,坐板后端上部制有靠背,靠背上端中部制有头枕,在头枕横向两侧对称制有倾斜向前延伸的头部挡板;在靠背上部横向两侧对称制有倾斜向前延伸的肩部挡板,增加座内人员安全性;在训练人员能够接触的座椅内层包覆安装有缓冲垫层(图中未标号)。
25.机械臂包括基座8、第一转动臂7、第二转动臂6、第三转动臂5、第四转动臂4以及第五转动臂3,基座上端同轴转动安装第一转动臂,第一转动臂由对应的电机控制能够进行水平方向自转;第一转动臂的径向一侧铰装第二转动臂的一端,第二转动臂由对应的电机控制能够进行竖直平面内的转动;第二转动臂的另一端铰装第三转动臂的一端,第三转动臂由对应的电机控制进行转动;第三转动臂的另一端同轴安装第四转动臂的一端,第四转动臂能够在对应的电机驱动下进行同轴转动;第四转动臂的另一端铰装第五转动臂的一端,第五转动臂的另一端固定连接座椅的后端中部。
26.为了保证连接,第四转动臂的一端为圆柱形结构4-1,第四转动臂的另一端为间隔对称设置的双层支撑板4-2,该双层支撑板之间垂直安装有第五转动臂转轴3-1,第五转动臂转轴中部径向一侧固装座椅连接杆3-2,座椅连接杆的另一端固装座椅。
27.机械臂的基座位置连接有电控箱9,机械臂的控制电路采用现有技术。
28.尽管为说明目的公开了本实用新型的实施例和附图,但是本领域的技术人员可以理解:在不脱离本实用新型及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本实用新型的范围不局限于实施例和附图所公开的内容。