1.本发明属于运动功能康复技术领域,尤其涉及一种基于脑机接口的下肢屈髋训练装置。
背景技术:
2.目前,髋关节是人体最大的关节,可以起到以下几方面的作用:1、连接作用:连接躯干和下肢的重要关节;2、支撑作用:人体直立行走时依靠双侧髋关节支撑;3、运动作用:如行走、奔跑、攀登等运动需依靠髋关节带动躯干来完成。屈髋肌群包括:髂腰肌、缝匠肌、阔筋膜张肌、股直肌、耻骨肌和长收肌,这些肌肉协同作用可以起到髋关节屈曲作用。在行走过程中,屈髋动作作为行走的起始动作,对维持正常步态起到非常重要的作用。患者脑卒中偏瘫后,下肢出现痉挛性瘫痪,屈髋动作困难,屈髋肌群逐渐萎缩使得训练难上加难。患者屈髋力量未达到一定程度就强制患者进行步态训练,容易使患者形成异常步态、创伤性关节炎、膝反张等引起患者多部位疼痛,患者一旦形成划圈样异常步态,会使患者行走不稳,增加患者跌倒、骨折风险。故训练屈髋动作,提高屈髋肌群肌力是脑卒中康复训练中的重要环节。
3.虽然,市场上运动功能康复器械名目繁多,但缺乏专门屈髋动作训练的仪器,功率自行车、四肢联动训练仪等并未针对性训练屈髋动作。适用在水中减重作用下开展的治疗仪器更是少之又少。临床上康复治疗师在立位、坐位、卧位等不同体位下可能应用一些手法训练来提高脑卒中患者偏瘫侧下肢的屈髋肌力,但这种治疗耗时耗力,加上康复训练场地、人数多等条件限制,患者每日可进行次数有限,疗效有限。
4.通过上述分析,现有技术存在的问题及缺陷为:
5.目前市面上没有专门训练偏瘫患者下肢屈髋动作的仪器,现有的用来提高脑卒中患者偏瘫侧下肢的屈髋肌力的治疗方法耗时耗力,加上康复训练场地、人数多等条件限制,患者每日可进行次数有限,疗效有限。
6.解决以上问题及缺陷的难度为:
7.由于现有技术的发展低和医疗、场地、人数等多因素的限制,市场上相关的康复训练的装置和方法存在很大的弊端。通过脑机接口将患者微弱的脑部信息与机械系统建立联系,实现辅助系统执行患者的思维动作,排出外界的干扰信号,创建新的康复训练装置。
8.解决以上问题及缺陷的意义为:
9.创建新的训练装置填补了市面上缺乏的治疗方法,针对屈髋动作进行训练,弥补当前康复训练针对性的短板。并且利用脑机系统患者可通过意识自主选择屏幕中训练参数,解决了现有的康复装置需手动触屏选择的问题。
技术实现要素:
10.针对现有技术存在的问题,本发明提供了一种基于脑机接口的下肢屈髋训练装置。
11.本发明是这样实现的,一种基于脑机接口的下肢屈髋训练装置包括:
12.承重支撑站立架系统,用于对患者躯体进行承重支撑,支撑患者站立;
13.智能显示模块,用于通过数显智能大屏幕对装置的工作状态和工作参数进行显示和调整;
14.脑机智能转换系统,用于对患者的脑电信号进行采集和分析,并根据分析结果对智能显示模块的显示内容进行调节选择;
15.脑机接口智能助力屈髋训练仪,用于对患者的下肢进行固定,辅助下肢进行屈髋训练。
16.进一步,所述承重支撑站立架系统包括支撑架和承重支撑背心,所述支撑架上端通过可调节长度的连接绳与承重支撑背心连接,所述支撑架下端连接有多个带锁万向轮。
17.进一步,所述智能显示模块包括数显智能大屏幕、连接杆和移动底座,所述数显智能大屏幕下端通过连接杆与移动底座上端连接;所述数显智能大屏幕为触摸操作屏,所述数显智能大屏幕侧面嵌装有开关按键、暂停按键和急停按键。
18.进一步,所述脑机智能转换系统包括脑机接口电极帽和信号处理器,所述脑机接口电极帽通过连接线路与信号处理器连接,所述信号处理器与智能显示模块连接。
19.进一步,所述脑机接口智能助力屈髋训练仪包括弹性腰带、硬质钢板、支撑腿和脚踏板,所述弹性腰带与硬质钢板上端连接,所述硬质钢板两端分别固定有一个机动控制装置,所述机动控制装置下侧与支撑腿上端连接,所述支撑腿下端与脚踏板垂直固定连接。
20.进一步,所述脚踏板前后两端均连接有固定带,所述固定带用于防止患者足内翻足下垂的畸形步态。
21.进一步,所述机动控制装置通过连接线路连接有蓄电池,所述机动控制装置用于带动支撑腿前后摆动。
22.进一步,所述支撑腿包括第一伸缩杆、自由转动关节和第二伸缩杆,所述第一伸缩杆和第二伸缩杆之间通过自由转动关节连接。
23.进一步,所述硬质钢板表面包裹有软材料层。
24.进一步,所述基于脑机接口的下肢屈髋训练装置实现训练动作为一下步骤:
25.步骤一:辅助患者穿戴训练装置,并且将脑机训练系统与患者的脑部建立联系;
26.步骤二:通过脑机信号提取接口,获取大脑行走的信号,将具体行走的信息向中央处理器发送,接收器返回具体的动作信息;
27.步骤三:根据动作内容信息生成反馈信号,通过反馈接口向大脑和辅助训练装置发送反馈信号;
28.步骤四:通过机动控制装置执行,包括行走动作大小、行走距离等意识内容信息。
29.进一步,所述脑机智能转换系统收集和辅助患者进行康复治疗的步骤为:
30.步骤一:通过脑机接口电极帽通过收集脑电信号;
31.步骤二:通过所述信号处理器将脑电信号转化、分析、模拟;
32.步骤三:将处理过后的信号反馈到智能显示屏,供患者提供选择训练的参数;
33.步骤四:患者选择的信号经处理器传送到所述机动控制装置,辅助患者进行康复训练。
34.结合上述的所有技术方案,本发明所具备的优点及积极效果为:
35.填补了市面上缺乏的治疗方法,重点对屈髋动作进行训练,弥补当前神经康复的短板。通过脑机接口电极帽通过收集脑电信号,将脑电信号转化分析后,使患者通过脑机接口处理器可自主选择屏幕中训练参数,不需手触屏选择。
附图说明
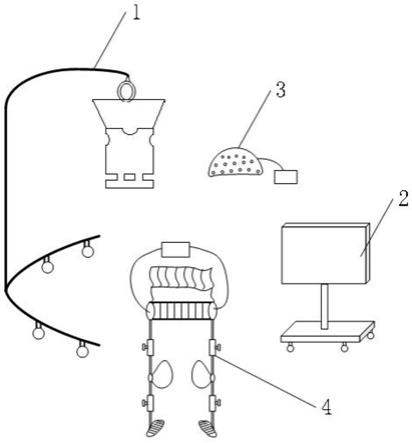
36.图1是本发明实施例提供的基于脑机接口的下肢屈髋训练装置的结构示意图。
37.图2是本发明实施例提供的承重支撑站立架系统的结构示意图。
38.图3是本发明实施例提供的智能显示模块的结构示意图。
39.图4是本发明实施例提供的脑机智能转换系统的结构示意图。
40.图5是本发明实施例提供的脑机接口智能助力屈髋训练仪的结构示意图。
41.图6是本发明实施例提供的承重支撑背心示意图。
42.图7是本发明实施例提供的下肢屈髋训练装置实现训练装置流程图。
43.图8是本发明实施例提供的脑机智能转换系统流程图。
44.图中:1、承重支撑站立架系统;2、智能显示模块;3、脑机智能转换系统;4、脑机接口智能助力屈髋训练仪;5、支撑架;6、带锁万向轮;7、连接绳;8、承重支撑背心;9、数显智能大屏幕;10、连接杆;11、移动底座;12、脑机接口电极帽;13、信号处理器;14、固定腰带;15、硬质钢板;16、机动控制装置;17、第一伸缩杆;18、自由转动关节;19、第二伸缩杆;20、脚踏板;21、蓄电池。
具体实施方式
45.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
46.针对现有技术存在的问题,本发明提供了一种基于脑机接口的下肢屈髋训练装置,下面结合附图对本发明作详细的描述。
47.主要方案和效果描述部分:
48.如图1所示,本发明实施例提供的基于脑机接口的下肢屈髋训练装置包括:承重支撑站立架系统1、智能显示模块2、脑机智能转换系统3和脑机接口智能助力屈髋训练仪4。
49.承重支撑站立架系统1,用于对患者躯体进行承重支撑,支撑患者站立;
50.智能显示模块2,用于通过数显智能大屏幕对装置的工作状态和工作参数进行显示和调整;
51.脑机智能转换系统3,用于对患者的脑电信号进行采集和分析,并根据分析结果对智能显示模块的显示内容进行调节选择;
52.脑机接口智能助力屈髋训练仪4,用于对患者的下肢进行固定,辅助下肢进行屈髋训练。
53.如图2所示,本发明实施例提供的承重支撑站立架系统包括支撑架和承重支撑背心,所述支撑架上端通过可调节长度的连接绳与承重支撑背心连接,所述支撑架下端连接有多个带锁万向轮。
54.如图3所示,本发明实施例提供的智能显示模块2包括数显智能大屏幕9、连接杆10
和移动底座11,所述数显智能大屏幕9下端通过连接杆10与移动底座11上端连接。数显智能大屏幕9为触摸操作屏,所述数显智能大屏幕侧面嵌装有开关按键、暂停按键和急停按键。
55.如图4所示,本发明实施例提供的脑机智能转换系统包括脑机接口电极帽12和信号处理器13,所述脑机接口电极帽12通过连接线路与信号处理器13连接,所述信号处理器13与智能显示模块连接。
56.如图5所示,本发明实施例提供的脑机接口智能助力屈髋训练仪包括弹性腰带14、硬质钢板15、支撑腿和脚踏板20,所述弹性腰带14与硬质钢板15上端连接,所述硬质钢板15两端分别固定有一个机动控制装置16,所述机动控制装置16下侧与支撑腿上端连接,所述支撑腿下端与脚踏板20垂直固定连接。
57.如图6所示,本发明实施例提供的承重支撑背心设置有连接绳7和承重支撑背心8,所述承重背心8将患者包裹和支撑,所述连接绳7连接支撑架将患者连通承重背心8一起支撑起来。
58.如图7所示,本发明实施例提供的下肢屈髋训练装置实现训练装置步骤为:
59.s701:辅助患者穿戴训练装置,并且将脑机训练系统与患者的脑部建立联系;
60.s702:通过脑机信号提取接口,获取大脑行走的信号,将具体行走的信息向中央处理器发送,接收器返回具体的动作信息;
61.s703:根据动作内容信息生成反馈信号,通过反馈接口向大脑和辅助训练装置发送反馈信号;
62.s704:通过机动控制装置执行,执行包括行走动作大小、行走距离等意识内容信息。
63.如图8所示,本发明实施例提供的脑机智能转换系统流为:
64.s801:通过脑机接口电极帽通过收集脑电信号;
65.s802:通过所述信号处理器将脑电信号转化、分析、模拟;
66.s803:将处理过后的信号反馈到智能显示屏,供患者提供选择训练的参数;
67.s804:患者选择的信号经处理器传送到所述机动控制装置,辅助患者进行康复训练。
68.本发明实施例中的脚踏板20前后两端均连接有固定带,所述固定带用于防止患者足内翻足下垂的畸形步态。
69.本发明实施例中的机动控制装置16通过连接线路连接有蓄电池21,所述机动控制装置16用于带动支撑腿前后摆动。
70.本发明实施例中的支撑腿包括第一伸缩杆17、自由转动关节18和第二伸缩杆19,所述第一伸缩杆17和第二伸缩杆19之间通过自由转动关节18连接。
71.本发明实施例中的硬质钢板15表面包裹有软材料层。
72.本发明实施例中的智能显示模块中的助力模式是机器根据患者屈髋力量的强弱施加不同的助力,达到设定的屈髋角度,如患者屈髋力量为0,则仪器给予的助力是能提高患者整个下肢的力量。
73.本发明实施例中的数显智能大屏幕可显示参数,可触屏,可通过脑机智能转换系统进行脑控。
74.数显智能大屏幕的工作模式包括自由运动和助力模式,需设置下列参数:
75.步速:xx步/分;
76.屈髋角度:前0~140
°
;后0~20
°
;
77.时间:0~20分钟;
78.间歇时间:每5分钟,休息1分钟;
79.每10分钟,休息2分钟。
80.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
81.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。