1.本发明涉及加湿系统技术领域,特别涉及一种置顶式微孔智能加湿系统。
背景技术:
2.加湿系统可以给指定的空间进行加湿,使空气湿度处于人体最合适的湿度范围(40%rh至60%rh),使人体处于一个舒适的环境;在此环境下病菌存活率最低,并且较湿润的空气经过呼吸道避免了原来干燥的空气造成的呼吸道干痒、不适,此外,在电子产品生产车间中进行加湿,能够有效消除静电,避免了电子产品的生产过程中的人体静电危害。
3.但是,现有的加湿系统都是通过定点加湿,存在空间加湿不均匀、加湿设备附近地面位置存在水汽等缺点。
技术实现要素:
4.本发明目的之一在于提供了一种置顶式微孔智能加湿系统,将雾化装置设置在目标空间的上部,采用顶部向下进行加湿,采用多个微孔雾化头进行精细化加湿,防止水汽聚集从而落到地面。
5.本发明实施例提供的一种置顶式微孔智能加湿系统,包括:
6.至少一个雾化主机,设置在目标空间的上部;
7.中央控制器,分别与每个雾化主机都通讯连接;
8.雾化主机包括:
9.主体,
10.多个微孔雾化头,设置在主体的下端面。
11.优选的,雾化主机还包括:
12.控制器,设置在主体内,与微孔雾化头电连接;
13.通讯模块,设置在主体内,与控制器电连接,用于与中央控制器通讯连接。
14.优选的,置顶式微孔智能加湿系统,还包括:
15.轨道,设置在目标空间的上方的房顶;雾化主机的主体上端面设置有行走机构;行走机构与轨道滑动连接;
16.优选的,轨道包括:
17.至少一个横向导槽,嵌设在房顶;
18.至少一个纵向导槽,嵌设在房顶;与横向导槽相垂直;
19.至少一个转角机构,设置在横向导槽和纵向导槽交汇处,用于将雾化主机从横向导槽输送至纵向导槽内或将雾化主机从纵向导槽输送至横向导槽内;
20.转角机构包括:
21.转动平台,在转动平台上嵌设有转换槽;
22.转动电机,转动电机的动力输出轴与转动平台的中心固定连接。
23.优选的,在转换槽内壁上嵌设有至少一个限位机构;
24.限位机构包括:
25.第一电控伸缩杆以及设置在第一电控伸缩杆末端的限位体;
26.在主体侧面与转换槽内壁对应的位置设置有限位槽;限位槽和限位体配合实现主体与转动平台相对位置的固定。
27.优选的,置顶式微孔智能加湿系统,还包括:
28.输水管路,设置在轨道旁;
29.至少一个第一出水接口,嵌设在轨道内的侧壁,通过软管与输水管路连通;
30.在主体的侧面对应轨道内的侧壁的位置设置有与第一出水接口相配合的第一接头机构;
31.第一接头机构包括:
32.第二电控伸缩杆以及设置在第二电控伸缩杆末端的第一进水接头;第一进水接头与第一出水接口相配合。
33.优选的,雾化主机还包括:
34.第二接头机构、第三接头机构、第二出水接口和第三出水接口,呈十字型设置在主体的外周;
35.存水腔,设置在主体内,分别通过管路与第二接头机构的第二进水接头、第三接头机构的第三进水接头、第二出水接口和第三出水接口连通;
36.电控阀门,设置在主体内,一端通过管路与第一进水接头连通,另一端与存水腔连通。
37.优选的,置顶式微孔智能加湿系统,还包括:
38.至少一个湿度检测模块,设置在目标空间的预设的第一位置,分别与中央控制器通讯连接,用于检测各个预设的第一位置的湿度值;
39.中央控制器执行如下操作:
40.获取目标空间的三维模型空间;
41.基于各个湿度检测模块设置的第一位置以及各个温湿度检测模块检测的湿度值,确定三维模型空间内各个点的湿度值;
42.基于三维模型空间内各个点的湿度值与预设的湿度控制范围,确定多个管控区域及各个管控区域的管控级别;
43.获取各个管控区域内的可布置雾化主机的布控点的布控点位图;
44.基于布控点位图和管控级别,确定当前的布控点;
45.控制雾化主机移动到当前的各个布控点。
46.优选的,置顶式微孔智能加湿系统,还包括:
47.至少一个水滴监控模块,设置在目标空间的预设的第二位置,分别与中央控制器通讯连接,用于检测各个预设的第二位置的水滴情况;
48.至少一个烘干模块,与水滴监控模块一一对应,与中央控制器通讯连接,用于接收中央控制器的烘干指令对对应的水滴监控模块的监控面进行烘干处理;
49.中央控制器执行如下操作:
50.获取雾化主机的当前的各个布控点;
51.基于雾化主机的当前的各个布控点,确定各个布控点对应的监控点;
52.基于监控点,确定对应的水滴监控模块并激活;
53.当通过水滴监控模块检测到水滴时,控制对应布控点的雾化主机降低输出的雾化量;
54.经过预设的第一时间后,激活检测到水滴的水滴监控模块对应的烘干模块对水滴监控模块进行烘干处理;
55.烘干处理完成后,经过预设的第二时间,继续通过水滴监控模块进行水滴监控;
56.当雾化主机降低输出的雾化量后,雾化主机对应的区域内的湿度降低到预设的湿度控制范围的范围外时,确定雾化主机对应的布控点周围是否存在正在工作的雾化主机;当存在时,调高周围工作的雾化主机的出雾量;当不存在时,确定可用布控点,在可用布控点上布控雾化主机。
57.优选的,置顶式微孔智能加湿系统,还包括:
58.至少一个人体检测模块,设置在目标空间的预设的第三位置,分别与中央控制器通讯连接,用于检测目标空间内的人体的移动参数;
59.中央控制器执行如下操作:
60.通过人体检测模块,获取目标空间内的人体的移动参数;
61.基于人体的移动参数,预测人体的移动轨迹;
62.获取当前的目标空间内的雾化主机的布控情况及各个雾化主机的工作参数;
63.基于移动轨迹、布控情况以及各个雾化主机的工作参数,确定当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率;
64.当概率大于预设的概率阈值时,确定对应的轨迹点为管控点;
65.基于管控点,确定对应的触发点;
66.当通过人体检测模块,检测到人体移动到触发点时,控制管控点对应的雾化主机关停或降低管控点对应的雾化主机的输出雾气量。
67.优选的,中央控制器基于移动轨迹、布控情况以及各个雾化主机的工作参数,确定当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率,包括:
68.基于移动轨迹,确定各个轨迹点的第四位置;
69.解析布控情况,确定各个雾化主机的第五位置;
70.基于第四位置和第五位置,将轨迹点与雾化主机进行关联,并确定轨迹点与关联的雾化主机的相对位置关系;
71.基于相对位置关系和雾化主机的工作参数,构建轨迹点对应的状态集;
72.获取预设的概率判断库;
73.将状态集与概率判断库中各个判断集一一进行匹配,获取与状态集匹配的判断集对应关联的概率值作为当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率。
74.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
75.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
76.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
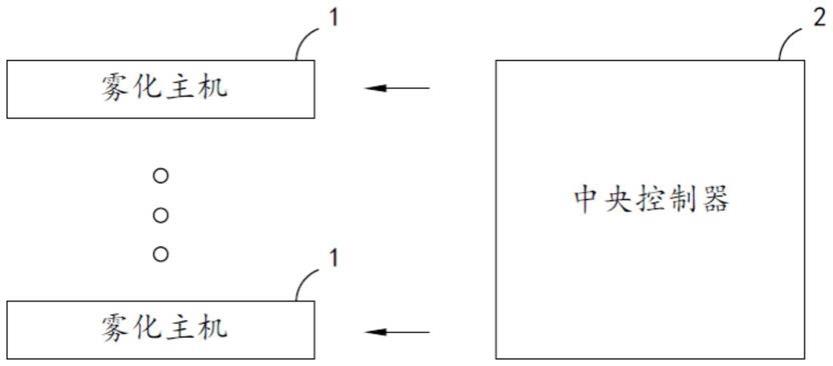
77.图1为本发明实施例中一种置顶式微孔智能加湿系统的示意图;
78.图2为本发明实施例中一种雾化主机的示意图;
79.图3为本发明实施例中一种雾化主机的结构示意图;
80.图4为本发明实施例中一种轨道的示意图。
具体实施方式
81.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
82.本发明实施例提供了一种置顶式微孔智能加湿系统,如图1至图4所示,包括:
83.至少一个雾化主机1,设置在目标空间的上部;
84.中央控制器2,分别与每个雾化主机1都通讯连接;
85.雾化主机1包括:
86.主体10,
87.多个微孔雾化头12,设置在主体10的下端面。
88.上述技术方案的工作原理及有益效果为:
89.通过将雾化主机设置在目标空间的上部,实现目标空间内的从上至下的湿度管控,下部为人为活动区域,喷洒的水汽从顶部向下运动,运动过程中溶解于空气中,提高湿度,避免了在目标空间下部加湿时,加湿设备喷洒的水汽对活动的人及物体的影响;多个微孔雾化头12,实现分散出气,使雾气不聚集凝聚而落到地面;更进一步,微孔雾化头12设置在以主体10的下端面的中心为圆心的圆周上,并且各个微孔雾化头12的出气方向为向外发散。中央控制器2为控制核心,用户可以通过移动终端登录中央控制器2,对各个雾化主机1进行控制,控制包括:开启或关闭;中央控制器2实现雾化主机1的远程控制。其中,雾化主机可以通过类似吸顶灯的固定机构,固定在原吸顶灯的位置孔内;也可以采用支架固定到目标空间的上部。
90.在一个实施例中,雾化主机1还包括:
91.控制器14,设置在主体10内,与微孔雾化头12电连接;
92.通讯模块17,设置在主体10内,与控制器14电连接,用于与中央控制器2通讯连接。
93.控制器14通过通讯模块17与中央控制器2通讯连接,接收中央控制器2下发的控制指令,控制器14为雾化主机1的控制中心,控制雾化主机1的雾化设备的工作,并控制微孔雾化头12的出雾量及是否出雾,此外,每个微孔雾化头12可以独立控制。
94.为了实现各个雾化主机1的定位,在一个实施例中,雾化主机1还包括:
95.定位模块,设置在主体10内,与控制器14电连接。
96.在一个实施例中,置顶式微孔智能加湿系统还包括:轨道,设置在目标空间的上方的房顶;雾化主机的主体上端面设置有行走机构;行走机构与轨道滑动连接;
97.轨道包括:
98.至少一个横向导槽30,嵌设在房顶;
99.至少一个纵向导槽31,嵌设在房顶;与横向导槽30相垂直;
100.至少一个转角机构,设置在横向导槽30和纵向导槽31交汇处,用于将雾化主机1从横向导槽30输送至纵向导槽31内或将雾化主机1从纵向导槽31输送至横向导槽30内;
101.转角机构包括:
102.转动平台33,在转动平台33上嵌设有转换槽32;
103.转动电机,转动电机的动力输出轴与转动平台33的中心固定连接。
104.上述技术方案的工作原理及有益效果如下:
105.行走机构11可以设置为电机带动的行走轮。转角机构,实现雾化主机1从横向导槽30移动至纵向导槽31内或从纵向导槽31移动到横向导槽30内;例如:转角机构的转换槽32首先与纵向导槽31接合,雾化主机1从纵向导槽31移动到转角机构的转换槽32;停在转换槽32内,转动电机的动力输出轴转动90度带动转动平台33转动,转动后转换槽32与横向导槽30接合;接合后,雾化主机1从转换槽32移动至横向导槽30内。更进一步,横向导槽30、纵向导槽31、转换槽32都可以设置为t型槽;行走轮为对称设置支架上的四个轮体;轮体的大小与t型槽的槽底部的横向槽的宽度相适应;轮体的上下表面与横向槽的上下内壁接触。
106.在一个实施例中,在转换槽32内壁上嵌设有至少一个限位机构;
107.限位机构包括:
108.第一电控伸缩杆以及设置在第一电控伸缩杆末端的限位体;
109.在主体10侧面与转换槽32内壁对应的位置设置有限位槽;限位槽和限位体配合实现主体10与转动平台33相对位置的固定。
110.上述技术方案的工作原理及有益效果为:
111.在雾化主机1移动到转换槽32内时,通过限位机构对雾化主机1的位置进行限制,防止雾化主机1回滚回纵向导槽31或横向导槽30内,保证转换的稳定,避免雾化主机1的回滚造成设备的损坏。
112.在一个实施例中,置顶式微孔智能加湿系统,还包括:
113.输水管路,设置在轨道旁;
114.至少一个第一出水接口31,嵌设在轨道内的侧壁,通过软管与输水管路连通;
115.在主体10的侧面对应轨道内的侧壁的位置设置有与第一出水接口31相配合的第一接头机构16;
116.第一接头机构16包括:
117.第二电控伸缩杆以及设置在第二电控伸缩杆末端的第一进水接头;第一进水接头与第一出水接口31相配合。
118.上述技术方案的工作原理及有益效果为:
119.当雾化主机1移动到第一出水接口31的位置时,第一接头机构16的第二电控伸缩杆伸长,将第一进水接头与第一出水接口31接合;实现雾化主机1的供水;通过输水管理实现雾化主机1移动到轨道的位置都可以进行供水。其中,第一出水接口31设置在t型槽的竖直槽的内壁上。
120.在一个实施例中,雾化主机1还包括:
121.第二接头机构15、第三接头机构18、第二出水接口19和第三出水接口20,呈十字型设置在主体10的外周;
122.存水腔,设置在主体10内,分别通过管路与第二接头机构15的第二进水接头、第三接头机构18的第三进水接头、第二出水接口19和第三出水接口20连通;
123.电控阀门13,设置在主体10内,一端通过管路与第一进水接头连通,另一端与存水腔连通。
124.上述技术方案的工作原理及有益效果为:
125.第二接头机构15、第二出水接口19对称设置;第三接头机构18与第三出水接口20对称设置;第二接头机构15、第三接头机构18、第二出水接口19和第三出水接口20实现了多个雾化主机1之间的相互联动,当联动后只需一个雾化主机1在第一出水接口31位置连接上第一出水接口31;联动的雾化主机1都可以正常工作,实现了轨道上不仅仅只有第一出水接口31的位置才能进行雾化主机1的布控,每个位置都可以进行雾化主机1的布控。
126.在一个实施例中,置顶式微孔智能加湿系统,还包括:
127.至少一个湿度检测模块,设置在目标空间的预设的第一位置,分别与中央控制器2通讯连接,用于检测各个预设的第一位置的湿度值;
128.中央控制器2执行如下操作:
129.获取目标空间的三维模型空间;
130.基于各个湿度检测模块设置的第一位置以及各个温湿度检测模块检测的湿度值,确定三维模型空间内各个点的湿度值;
131.基于三维模型空间内各个点的湿度值与预设的湿度控制范围,确定多个管控区域及各个管控区域的管控级别;
132.获取各个管控区域内的可布置雾化主机1的布控点的布控点位图;
133.基于布控点位图和管控级别,确定当前的布控点;
134.控制雾化主机1移动到当前的各个布控点。
135.上述技术方案的工作原理及有益效果为:
136.通过湿度检测模块对目标空间内的湿度进行监控,进而确定需要进行湿度管控的区域及各个管控区域的管控级别;例如计算各个点的湿度值与预设的湿度控制范围的最小值的差值,进行管控区域的划分及管控级别的设置;例如差值在0-10%rh为一级管控;10%rh-20%rh为二级管控等;布控点位图根据第一出水接口31的位置和雾化主机1在轨道上的投影的长度确定;首先第一出水接口31位置可以确定为可布控的布控点,依据各个雾化主机1之间的联动,可以辐射至周围的等同于雾化主机1在轨道上的投影的长度的间距的点位。各个不同的管控级别的布控点的密集度不同,二级管控等级的布控点的密集度高于一级管控等级的布控点的密集度;即通过预设的管控级别与布控点位距离关联表,确定布控点的距离,进而从布控点位图中确定当前的布控点。其中,湿度检测模块包括:可无线连接至中央控制器2的湿度传感器。
137.在一个实施例中,置顶式微孔智能加湿系统,还包括:
138.至少一个水滴监控模块,设置在目标空间的预设的第二位置,分别与中央控制器2通讯连接,用于检测各个预设的第二位置的水滴情况;
139.至少一个烘干模块,与水滴监控模块一一对应,与中央控制器2通讯连接,用于接收中央控制器2的烘干指令对对应的水滴监控模块的监控面进行烘干处理;
140.中央控制器2执行如下操作:
141.获取雾化主机1的当前的各个布控点;
142.基于雾化主机1的当前的各个布控点,确定各个布控点对应的监控点;
143.基于监控点,确定对应的水滴监控模块并激活;
144.当通过水滴监控模块检测到水滴时,控制对应布控点的雾化主机1降低输出的雾化量;
145.经过预设的第一时间(例如5分钟)后,激活检测到水滴的水滴监控模块对应的烘干模块对水滴监控模块进行烘干处理;
146.烘干处理完成后,经过预设的第二时间(例如:2分钟),继续通过水滴监控模块进行水滴监控;
147.当雾化主机1降低输出的雾化量后,雾化主机1对应的区域内的湿度降低到预设的湿度控制范围的范围外时,确定雾化主机1对应的布控点周围是否存在正在工作的雾化主机1;当存在时,调高周围工作的雾化主机1的出雾量;当不存在时,确定可用布控点,在可用布控点上布控雾化主机1。
148.上述技术方案的工作原理及有益效果为:
149.通过对可能落在地上的水滴进行监测,实时调整雾化主机1的出雾,避免水汽凝结滴落到地面或其他工作台面,具体依据水滴监控模块设置的第二位置;第二位置可以是地面,也可以是工厂内的工人的工作台面其中,水滴监控模块包括:可无线或有线连接至中央控制器2的雨量传感器;烘干模块,实现对水滴监控模块的烘干,方便雾化主机1调整出雾后的再次测量。
150.在一个实施例中,置顶式微孔智能加湿系统,还包括:
151.至少一个人体检测模块,设置在目标空间的预设的第三位置,分别与中央控制器2通讯连接,用于检测目标空间内的人体的移动参数;人体检测模块包括:图像采集设备或红外人体探测设备;图像采集设备是通过获取目标空间内的图像,基于图像识别技术,确定图像中存在人体轮廓,并根据人体轮廓的变化,确定人体的移动参数;红外人体探测设备是基于红外探测原理进行人体探测。
152.中央控制器2执行如下操作:
153.通过人体检测模块,获取目标空间内的人体的移动参数(例如:速度、移动方向、加速度等);
154.基于人体的移动参数,预测人体的移动轨迹;可以通过预设的神经网络模型进行预测,将移动参数作为输入,获取移动轨迹的预测结果。
155.获取当前的目标空间内的雾化主机1的布控情况及各个雾化主机1的工作参数(例如:各个微孔雾化头12的输出的雾化量及各个微孔雾化头12的输气方向等);
156.基于移动轨迹、布控情况以及各个雾化主机1的工作参数,确定当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率;
157.当概率大于预设的概率阈值(80%)时,确定对应的轨迹点为管控点;
158.基于管控点,确定对应的触发点;触发点为轨迹上与管控点相距为一定距离的点,该一定距离通过人体速度乘以预设的管控时间确定。
159.当通过人体检测模块,检测到人体移动到触发点时,控制管控点对应的雾化主机1关停或降低管控点对应的雾化主机1的输出雾气量。
160.其中,中央控制器2基于移动轨迹、布控情况以及各个雾化主机1的工作参数,确定当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率,包括:
161.基于移动轨迹,确定各个轨迹点的第四位置;
162.解析布控情况,确定各个雾化主机1的第五位置;
163.基于第四位置和第五位置,将轨迹点与雾化主机1进行关联,并确定轨迹点与关联的雾化主机1的相对位置关系;
164.基于相对位置关系和雾化主机1的工作参数,构建轨迹点对应的状态集;
165.获取预设的概率判断库;
166.将状态集与概率判断库中各个判断集一一进行匹配,获取与状态集匹配的判断集对应关联的概率值作为当人体移动到移动轨迹上各个轨迹点时沾染水滴的概率。
167.上述技术方案的工作原理及有益效果为:
168.通过对目标空间中的人员位置及移动轨迹的预测,进而确定雾化主机1的出雾水滴是否回落到人员的身上,对工作人员产生困扰。此外,通过对工作人员的移动轨迹进行预测,进而实现对可能对工作人员产生困扰的雾化主机1进行关断。其中,将状态集与概率判断库中各个判断集一一进行匹配,可以采用计算状态集和判定集的相似度的方式进行匹配,相似度计算公式如下:
[0169][0170]
其中,w为相似度;δi为状态集中第i个参数值;σi为判定集中第i个参数值;n为状态集的参数总数或判定集的参数总数。
[0171]
当相似度大于预设的相似度阈值(0.95)时,确定判断集与状态集匹配。
[0172]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。