1.本实用新型涉及无人机消防技术领域,具体为一种高空灭火消防机器人。
背景技术:
2.在现代化社会建设中,高层建筑和企业生产的特殊性,导致燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等环境时,在诸多事故现场都需要消防人员亲自拿喷射头对准火源,才可达到灭火效果,如果是高层建筑着火而且火源在100米以上的话,对消防人员也会产生不小的困难就需要高空灭火机器人。
3.现有的高空灭火消防机器人在进行高层处火源的灭火,是工作人员控制机器人的飞行高度来进行灭火,喷水口难以对准火源和大面积的喷洒水,且在降落时受到机器人重力作用不能很好的缓冲。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种高空灭火消防机器人,具备灭火碰头精准对准火源处进行灭火和大面积喷水,同时灭火装备可以进行下落缓冲等优点,解决了机器人灭火喷水准确度不足,喷水面积小和机器人下落不能很好缓冲的问题。
6.(二)技术方案
7.为解决上述技术问题,本实用新型提供如下技术方案:一种高空灭火消防机器人,包括主体箱,所述主体箱的底部固定安装有缓冲支架,所述主体箱的内腔固定安装有支撑面板,所述支撑面板的顶部固定安装有水箱,所述主体箱的两侧的顶部均固定安装有支撑板,所述支撑板的顶部固定安装有飞行装置,所述主体箱的内腔且位于支撑面板的下方固定安装有高能电池,所述主体箱内腔的右侧固定安装有电机,所述主体箱内腔的底部固定安装有支撑架,所述主体箱的底部且位于支撑架的上方固定安装有旋转装置,所述旋转装置包括旋转块,所述旋转块的底部固定安装有连接板,所述电机的输出端通过联轴器固定安装有旋转臂,所述旋转臂的左侧转动安装有滑动块,所述滑动块的外表面与连接板的内表面滑动连接,所述缓冲支架的底部通过弹簧缓冲装置固定安装有降落板。
8.优选的,所述支撑面板的顶部且位于水箱的右方固定安装有摄像装置,所述主体箱的内腔且位于高能电池的右方固定安装有微型水泵。
9.优选的,所述连接板的外表面开设有滑槽,所述连接板的右侧固定安装有耐热喷头。
10.优选的,所述微型水泵的顶部固定连通有高压软管。
11.优选的,所述飞行装置,包括一号电机,所述一号电机的输出端通过联轴器固定安装有叶片轴,且飞行装置的数量为四个。
12.优选的,所述弹簧缓冲装置,包括伸缩杆,所述伸缩杆的外表面套摄有弹簧。
13.(三)有益效果
14.与现有技术相比,本实用新型提供了一种高空灭火消防机器人,具备以下有益效果:该高空灭火消防机器人可通过在地面上通过控制器启动一号电机转动带动叶片轴转动,从而让机器人起飞到高空火灾发生处,通摄像装置观察火灾的位置,在启动微型水泵工作让水箱中的水通过高压软管输送到耐热喷头处,在电机,电机转动带动旋转臂转动,旋转臂通过滑动块带动连接板做半圆周期运动,连接板的右端固定安装有耐热喷头,耐热喷头在连接板的作用下,达到了半圆周期运动的洒水效果,从而对火源大面积灭火,当火灭完后,再控制机器人下降,当机器人落地时在降落板配合弹簧缓冲装置,可以做到无损伤机器人内部的设备作用。
15.1、该高空灭火消防机器人,通过电机转动带动旋转臂转动,旋转臂通过滑动块带动连接板半圆周期运动,连接板的右侧固定安装有耐热喷头,从而使耐热喷头可以进行半圆周期运动,从而达到了对火源处大面积的灭火和准确对准火源效果大大提高了高空消防灭火的工作效率。
16.2、该高空灭火消防机器人,通过伸缩杆配合弹簧伸缩上升运动,降落板把机器人自身重力转移到伸缩杆和弹簧上进行缓冲,从而达到了保护机器人缓冲保护设备的效果大大提高了机器人下落时的安全性,非常好的保护了机器人内部的装置。
附图说明
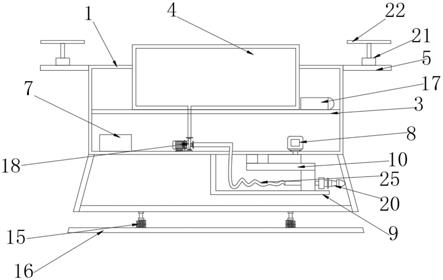
17.图1为本实用新型的内部结构主视图。
18.图2为本实用新型的外部结构右视图。
19.图3为本实用新型的外部结构俯视图。
20.图4为本实用新型的旋转装置外部结构纵视图。
21.图中:1、主体箱;2、缓冲支架;3、支撑面板;4、水箱;5、支撑板;6、飞行装置;7、高能电池;8、电机;9、支撑架;10、旋转装置;11、旋转块;12、连接板;13、旋转臂;14、滑动块;15、弹簧缓冲装置;16、降落板;17、摄像装置;18、微型水泵;19、滑槽;20、耐热喷头;21、一号电机;22、叶片轴;23、伸缩杆;24、弹簧;25、高压软管。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-4,包括主体箱1,所述主体箱1的底部固定安装有缓冲支架2,所述主体箱1的内腔固定安装有支撑面板3,所述支撑面板3的顶部固定安装有水箱4,所述主体箱1的两侧的顶部均固定安装有支撑板5,所述支撑板5的顶部固定安装有飞行装置6,所述主体箱1的内腔且位于支撑面板3的下方固定安装有高能电池7,所述主体箱1内腔的右侧固定安装有电机8,电机8与外部电源电性连接,所述主体箱1内腔的底部固定安装有支撑架9,所述主体箱1的底部且位于支撑架9的上方固定安装有旋转装置10,所述旋转装置10包括旋转块11,所述旋转块11的底部固定安装有连接板12,所述电机8的输出端通过联轴器固定安装有
旋转臂13,所述旋转臂13的左侧转动安装有滑动块14,所述滑动块14的外表面与连接板12的内表面滑动连接,所述缓冲支架2的底部通过弹簧缓冲装置15固定安装有降落板16,所述支撑面板3的顶部且位于水箱4的右方固定安装有摄像装置17,所述主体箱1的内腔且位于高能电池7的右方固定安装有微型水泵18,所述连接板12的外表面开设有滑槽19,所述连接板12的右侧固定安装有耐热喷头20,所述微型水泵18的顶部固定连通有高压软管25,所述飞行装置6,包括一号电机21,一号电机21与外部电源电性连接,所述一号电机21的输出端通过联轴器固定安装有叶片轴22,且飞行装置6的数量为四个,所述弹簧缓冲装置15,包括伸缩杆23,所述伸缩杆23的外表面套摄有弹簧24。
24.工作原理:首先使用人员在地面上通过控制器启动一号电机21转动带动叶片轴22转动,从而让机器人起飞到高空火灾发生处,通摄像装置17观察火灾的位置,在启动微型水泵18工作让水箱4中的水通过高压软管25输送到耐热喷头20处,在电机8,电机8转动带动旋转臂13转动,旋转臂13通过滑动块14带动连接板12做半圆周期运动,连接板12的右端固定安装有耐热喷头20,耐热喷头20在连接板12的作用下,达到了半圆周期运动的洒水效果,从而对火源大面积灭火,当火灭完后,使用人员再控制机器人下降,当机器人落地时在降落板16配合弹簧缓冲装置15,可以做到无损伤机器人内部的设备作用。
25.综上所述,该高空灭火消防机器人可通过在地面上通过控制器启动一号电机21转动带动叶片轴22转动,从而让机器人起飞到高空火灾发生处,通摄像装置17观察火灾的位置,在启动微型水泵18工作让水箱4中的水通过高压软管25输送到耐热喷头20处,在电机8,电机8转动带动旋转臂13转动,旋转臂13通过滑动块14带动连接板12做半圆周期运动,连接板12的右端固定安装有耐热喷头20,耐热喷头20在连接板12的作用下,达到了半圆周期运动的洒水效果,从而对火源大面积灭火,当火灭完后,再控制机器人下降,当机器人落地时在降落板16配合弹簧缓冲装置15,可以做到无损伤机器人内部的设备作用。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。