1.本技术涉及消防灭火技术领域,尤其涉及一种消防灭火用智能机器人。
背景技术:
2.在自然界各种灾害中,火灾发生最为频繁,损害社会资源最为严重,投入的消防人力和物力比较大,山林的爆燃会对消防人员的人身安全构成严重的威胁。因此山林消防灭火需要可以代替消防人员消防的工具。
3.目前,现有的山林灭火方法是先用挖掘装置或人工在火灾周边挖出一条防火隔离线,避免火势蔓延,然后再利用消防装置进行灭火,这种方式需要用到多种装置配合,提高了成本,增加了劳动量。
技术实现要素:
4.本技术实施例提供一种消防灭火用智能机器人,包括壳体、挖土装置、推土装置和灭火装置,所述壳体呈水平设置,所述壳体内安装有呈水平设置的分隔板,且分隔板将壳体的内部分隔为两个腔体,所述灭火装置设置在分隔板的顶部,且灭火装置的顶部贯穿壳体并向上延伸,所述壳体的底部开设有呈间隔设置的两个开口,所述挖土装置和推土装置呈对称分别设置在两个开口内,且挖土装置和推土装置均位于分隔板的下方。
5.进一步的,所述挖土装置包括旋转电机、连接圆板、滑动框、旋转轴、挖土板、挖土组件和两个移动齿轮,所述壳体的两侧壁内均开设有移动腔,所述壳体的两侧壁内均安装有移动齿条,且两个移动齿条分别位于两个移动腔内,两个所述移动齿轮呈竖直分别位于两个移动腔内,且两个移动齿轮分别和两个移动齿条相啮合,每个所述移动齿轮的外壁上均开设有抵触口,所述旋转轴呈水平位于壳体内,且旋转轴的两端分别与壳体的两内侧壁滑动连接,所述旋转轴的两端上均安装有抵触块,且两个抵触块分别贯穿壳体的两内侧壁并分别插装在两个抵触口内,每个所述抵触块的一侧壁均与一个移动齿轮的一内侧壁相贴合,每个抵触块的另一侧壁均与一个移动齿轮的另一内侧壁之间设有空隙,所述连接圆板安装在一个抵触块的侧壁上,且连接圆板的一侧壁与一个移动齿轮相贴合,所述滑动框滑动设置在壳体的外壁上,所述旋转电机安装在滑动框的侧壁上,且旋转电机的输出端依次贯穿滑动框和壳体并与连接圆板的另一侧壁相连接,所述挖土板呈水平位于一个开口内,且挖土板的一端套设在旋转轴上,所述挖土板的另一端开设有长口,所述挖土组件设置在挖土板的顶部,且挖土组件位于长口处。
6.进一步的,所述挖土组件包括挖土电机、挖土辊和两个挖土座,两个所述挖土座分别位于长口的两侧,且每个挖土座均设置在挖土板的顶部,所述挖土辊呈水平转动设置在两个挖土座之间,所述挖土电机安装在一个挖土座的侧壁上,且挖土电机的输出端贯穿挖土座与挖土辊固定连接,所述挖土辊的外壁上安装有沿其周向等角度设置的多个挖土片,且每个挖土片的侧壁均呈倾斜设置。
7.进一步的,所述推土装置包括转动电机、转动轴、同步带、推土板、引导组件、横推
组件和两个弧形板,所述转动轴位于壳体内,且转动轴的两端分别贯穿壳体的两内侧壁并向内延伸,所述转动电机安装在壳体的外壁上,且转动电机的输出端贯穿壳体的内壁并向内延伸,所述同步带位于壳体的侧壁内,且同步带套设在转动电机的输出端和转动轴上,所述推土板呈水平位于另一个开口内,且推土板的另一端套设在转动轴上,两个所述弧形板分别滑动设置在壳体的两内侧壁上,且两个弧形板的底部分别与推土板另一端的两侧壁相连接,所述引导组件设置在两个弧形板之间,所述壳体内设有推土腔,且推土腔位于推土板的旁侧,所述横推组件设置在壳体的侧壁上,且横推组件的输出端贯穿壳体并延伸至推土腔内。
8.进一步的,所述引导组件包括引导电机、引导辊、引导座和多个引导片,所述引导辊转动设置在两个弧形板之间,多个所述引导片沿引导辊周向等角度设置在引导辊的外壁上,所述引导电机安装在壳体的侧壁上,且引导电机的输出端贯穿壳体的侧壁并向内延伸,所述引导辊的一端上安装有弧形插接块,且弧形插接块与壳体的内侧壁滑动连接,所述引导电机的输出端上开设有与弧形插接块相配合的弧形插接口,所述引导座设置在壳体的内壁上,且引导座位于推土腔的上方,引导座呈倾斜设置。
9.进一步的,所述横推组件包括伸缩气缸、往复板、半齿轮、连接臂、转动杆和横推板,所述横推板呈竖直滑动设置在壳体内,且横推板位于推土腔内,所述横推板的顶部呈三角型结构设置,所述往复板滑动设置在壳体的外壁上,所述往复板的底部设有往复齿条,所述半齿轮转动设置在壳体的外壁上,且半齿轮与往复齿条相啮合,所述壳体的外壁上安装有辅助板,所述伸缩气缸设置在辅助板的侧壁上,且伸缩气缸的输出端贯穿辅助板与往复板相连接,所述连接臂呈竖直位于壳体的旁侧,且连接臂的顶部与半齿轮相连接,所述转动杆呈水平位于连接臂与壳体之间,所述转动杆的一端贯穿壳体与横推板的侧壁滑动连接,且转动杆的另一端与连接臂的底部转动连接,所述壳体的外壁上开设有供转动杆滑动的弧形口,所述壳体的两侧壁上均开设有出口,且两个出口均与推土腔相连通。
10.进一步的,所述壳体的两侧壁上均铰接设有闭合门,且两个闭合门分别位于两个出口处,两个闭合门上均设有把手。
11.进一步的,所述灭火装置包括水箱、连接软管、搭接座、灭火电机、主动齿轮、从动齿轮、灭火盘和喷水组件,所述搭接座呈水平设置在壳体的内壁上,且搭接座位于分隔板的下方,所述水箱位于壳体的上方,且水箱的底部依次贯穿壳体和分隔板并设置在搭接座的顶部,所述主动齿轮与从动齿轮均转动设置在分隔板的顶部,且主动齿轮与从动齿轮相啮合,所述灭火电机安装在分隔板的底部,且灭火电机的输出端贯穿分隔板与主动齿轮相连接,所述壳体的顶部开设有圆口,所述灭火盘转动设置在圆口内,且灭火盘位于从动齿轮的正上方,所述灭火盘的底部安装有沿其周向等角度设置的三个立柱,且每个立柱的底部均与从动齿轮相连接,所述喷水组件设置在灭火盘的顶部,所述连接软管呈蛇形位于分隔板与壳体之间,所述连接软管的一端与水箱相连通,且连接软管的另一端贯穿灭火盘与喷水组件相连通。
12.进一步的,所述喷水组件包括调节座、弧形滑块、喷射头、调节电机、调节圆盘、两个延伸板和两个调节杆,所述调节座设置在灭火盘的顶部,且调节座呈半圆型结构设置,所述调节座的两侧壁上均开设有调节口,且弧形滑块滑动设置在调节口内,所述喷射头位于调节座内,且喷射头的一端贯穿弧形滑块并向外延伸,喷射头的另一端与连接软管相连通,
所述调节圆盘呈竖直位于调节座内,所述调节电机安装在调节座的侧壁上,且调节电机的输出端贯穿调节座与调节圆盘相连接,两个所述延伸板呈间隔设置在调节圆盘的外壁上,两个所述调节杆呈水平位于调节座内,且两个调节杆分别设置在两个延伸板的侧壁上,所述喷射头位于两个调节杆之间。
13.进一步的,所述壳体的外壁上安装有呈矩形分布的四个移动轮,所述壳体的两侧壁上均安装有导土块,且两个导土块呈对称设置,每个导土块均呈倾斜设置,所述壳体的两侧壁上均安装有蜂鸣器,所述壳体的外壁上安装有超声波探测器。
14.本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
15.其一,当要进行挖掘防火隔离带时,旋转电机驱动旋转轴转动,带动挖土板以旋转轴为轴心转动至地面,同时,驱动转动电机,在同步带的连接下,使转动轴随着转动电机的转动而进行旋转,使得推土板也与地面接触,并且两个弧形板随着推土板的转动在壳体的两内侧壁上滑动,旋转轴在转动的同时,也会带动两端的抵触块在两个移动齿轮上的抵触口内进行转动,当挖土板上的挖土组件接触地面时,两个抵触块也会与两个移动齿轮的另一内侧壁相抵触,挖土电机驱动挖土辊转动,带动挖土辊上的多个挖土片进行旋转,通过侧壁倾斜的挖土片对地面进行挖掘工作,并使挖掘出的泥土向推土板处飞溅,同时旋转电机会继续驱动旋转轴转动,当挖土片越挖越深时,通过旋转轴带动两端的抵触块转动,使得两个抵触块带着两个相抵触的移动齿轮进行转动,使移动齿轮在移动齿条上进行移动,从而带着旋转轴和挖土板沿移动齿条的方向进行移动,并使旋转轴带着挖土板继续转动,使挖土片能够向斜下方挖掘,从而挖出深度足够的防火隔离带,挖掘完成后,旋转电机驱动旋转轴反转,先带动旋转轴两端的抵触块在移动齿轮内转动,直至抵触块与移动齿轮的内侧壁相抵触,之后再带动移动齿轮在移动齿条上向后移动,直至挖土板转动至水平状态并收回壳体内,当两个弧形板在壳体内滑动时,会带着引导辊上的弧形插接块在壳体的内壁上进行滑动,直至推土板与地面接触,弧形插接块滑动至引导电机上的弧形插接口相卡接,引导电机驱动引导辊带动多个引导片转动,将挖土片挖出的泥土引导至壳体内的推土腔中,通过引导座的设置,使得通过引导片移动至壳体内的泥土会顺着引导座倾斜的壁落入推土腔内,泥土落入至推土腔内后,伸缩气缸驱动往复板进行来回移动,使与往复板底部的往复齿条相啮合的半齿轮进行往复转动,带动连接臂以半齿轮为轴心进行来回摆动,通过转动杆与横推板侧壁的滑动连接,使得转动杆会随着连接臂的摆动,在横推板的侧壁上进行上下滑动,同时并带动横推板在推土腔内进行来回移动,从而将推土腔内的泥土来回推动至两个出口处,泥土通过两个出口移动出壳体,并向壳体外两侧排出,防止泥土堆积在壳体的下方以及防火隔离带内。
16.其二,当要进行灭火时,驱动喷射头,使水箱内的液体通过连接软管移动至喷射头并向外喷出,调节电机驱动调节圆盘来回转动,使两个调节杆带着喷射头和弧形滑块在调节口内进行来回滑动,即可调节喷射头的喷射角度,同时灭火电机驱动主动齿轮转动,带动与主动齿轮相啮合的从动齿轮旋转,通过三个立柱的连接,使得灭火盘带着喷射头随着从动齿轮的转动而进行旋转,扩大喷水的面积。
附图说明
17.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本申
请的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
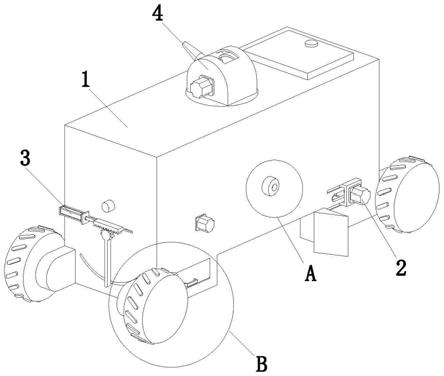
18.图1为本发明的立体结构示意图;
19.图2为图1中a处的放大图;
20.图3为图1中b处的放大图;
21.图4为本发明的立体结构剖视示意图一;
22.图5为本发明的立体结构剖视示意图二;
23.图6为本发明内部的立体结构示意图;
24.图7为本发明挖土装置的立体结构示意图;
25.图8为本发明挖土装置局部的立体结构分解示意图;
26.图9为本发明推土装置局部的立体结构分解示意图一;
27.图10为本发明推土装置局部的立体结构分解示意图二;
28.图11为本发明灭火装置的立体结构分解示意图;
29.图12为图11中c处的放大图;
30.图13为本发明工作时的立体结构示意图。
31.图中:壳体1、分隔板11、移动腔12、移动齿条13、推土腔14、辅助板15、闭合门16、把手17、移动轮18、导土块19、蜂鸣器110、超声波探测器111、挖土装置2、旋转电机21、连接圆板22、滑动框23、旋转轴24、挖土板25、挖土组件26、挖土电机261、挖土辊262、挖土座263、挖土片264、移动齿轮27、抵触口28、抵触块29、推土装置3、转动电机31、转动轴32、同步带33、推土板34、引导组件35、引导电机351、引导辊352、引导座353、引导片354、弧形插接块355、弧形插接口356、横推组件36、伸缩气缸361、往复板362、半齿轮363、连接臂364、转动杆365、横推板366、往复齿条367、弧形板37、灭火装置4、水箱41、连接软管42、搭接座43、灭火电机44、主动齿轮45、从动齿轮46、灭火盘47、喷水组件48、调节座481、弧形滑块482、喷射头483、调节电机484、调节圆盘485、延伸板486、调节杆487、立柱49。
具体实施方式
32.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.以下结合附图,详细说明本技术各实施例提供的技术方案。
34.本实施例,如图1至图13所示,一种消防灭火用智能机器人,包括壳体1、挖土装置2、推土装置3和灭火装置4,所述壳体1呈水平设置,所述壳体1内安装有呈水平设置的分隔板11,且分隔板11将壳体1的内部分隔为两个腔体,所述灭火装置4设置在分隔板11的顶部,且灭火装置4的顶部贯穿壳体1并向上延伸,所述壳体1的底部开设有呈间隔设置的两个开口,所述挖土装置2和推土装置3呈对称分别设置在两个开口内,且挖土装置2和推土装置3均位于分隔板11的下方。
35.具体的,所述挖土装置2包括旋转电机21、连接圆板22、滑动框23、旋转轴24、挖土板25、挖土组件26和两个移动齿轮27,所述壳体1的两侧壁内均开设有移动腔12,所述壳体1的两侧壁内均安装有移动齿条13,且两个移动齿条13分别位于两个移动腔12内,两个所述
移动齿轮27呈竖直分别位于两个移动腔12内,且两个移动齿轮27分别和两个移动齿条13相啮合,每个所述移动齿轮27的外壁上均开设有抵触口28,所述旋转轴24呈水平位于壳体1内,且旋转轴24的两端分别与壳体1的两内侧壁滑动连接,所述旋转轴24的两端上均安装有抵触块29,且两个抵触块29分别贯穿壳体1的两内侧壁并分别插装在两个抵触口28内,每个所述抵触块29的一侧壁均与一个移动齿轮27的一内侧壁相贴合,每个抵触块29的另一侧壁均与一个移动齿轮27的另一内侧壁之间设有空隙,所述连接圆板22安装在一个抵触块29的侧壁上,且连接圆板22的一侧壁与一个移动齿轮27相贴合,所述滑动框23滑动设置在壳体1的外壁上,所述旋转电机21安装在滑动框23的侧壁上,且旋转电机21的输出端依次贯穿滑动框23和壳体1并与连接圆板22的另一侧壁相连接,所述挖土板25呈水平位于一个开口内,且挖土板25的一端套设在旋转轴24上,所述挖土板25的另一端开设有长口,所述挖土组件26设置在挖土板25的顶部,且挖土组件26位于长口处,当要进行挖掘防火隔离带时,旋转电机21驱动旋转轴24转动,带动挖土板25以旋转轴24为轴心转动至地面,并且驱动推土装置3也转动至地面,旋转轴24在转动的同时,也会带动两端的抵触块29在两个移动齿轮27上的抵触口28内进行转动,当挖土板25上的挖土组件26接触地面时,两个抵触块29也会与两个移动齿轮27的另一内侧壁相抵触,驱动挖土组件26进行挖掘工作,同时旋转电机21会继续驱动旋转轴24转动,当挖土组件26越挖越深时,通过旋转轴24带动两端的抵触块29转动,使得两个抵触块29带着两个相抵触的移动齿轮27进行转动,使移动齿轮27在移动齿条13上进行移动,从而带着旋转轴24和挖土板25沿移动齿条13的方向进行移动,并使旋转轴24带着挖土板25继续转动,使挖土组件26能够向斜下方挖掘,从而挖出深度足够的防火隔离带,挖掘完成后,旋转电机21驱动旋转轴24反转,先带动旋转轴24两端的抵触块29在移动齿轮27内转动,直至抵触块29与移动齿轮27的内侧壁相抵触,之后再带动移动齿轮27在移动齿条13上向后移动,直至挖土板25转动至水平状态并收回壳体1内。
36.具体的,所述挖土组件26包括挖土电机261、挖土辊262和两个挖土座263,两个所述挖土座263分别位于长口的两侧,且每个挖土座263均设置在挖土板25的顶部,所述挖土辊262呈水平转动设置在两个挖土座263之间,所述挖土电机261安装在一个挖土座263的侧壁上,且挖土电机261的输出端贯穿挖土座263与挖土辊262固定连接,所述挖土辊262的外壁上安装有沿其周向等角度设置的多个挖土片264,且每个挖土片264的侧壁均呈倾斜设置,当挖土板25与地面接触时,挖土电机261驱动挖土辊262转动,带动挖土辊262上的多个挖土片264进行旋转,通过侧壁倾斜的挖土片264对地面进行挖掘工作,并使挖掘出的泥土向推土装置3处飞溅。
37.具体的,所述推土装置3包括转动电机31、转动轴32、同步带33、推土板34、引导组件35、横推组件36和两个弧形板37,所述转动轴32位于壳体1内,且转动轴32的两端分别贯穿壳体1的两内侧壁并向内延伸,所述转动电机31安装在壳体1的外壁上,且转动电机31的输出端贯穿壳体1的内壁并向内延伸,所述同步带33位于壳体1的侧壁内,且同步带33套设在转动电机31的输出端和转动轴32上,所述推土板34呈水平位于另一个开口内,且推土板34的另一端套设在转动轴32上,两个所述弧形板37分别滑动设置在壳体1的两内侧壁上,且两个弧形板37的底部分别与推土板34另一端的两侧壁相连接,所述引导组件35设置在两个弧形板37之间,所述壳体1内设有推土腔14,且推土腔14位于推土板34的旁侧,所述横推组件36设置在壳体1的侧壁上,且横推组件36的输出端贯穿壳体1并延伸至推土腔14内,挖土
板25与地面接触的同时,驱动转动电机31,在同步带33的连接下,使转动轴32随着转动电机31的转动而进行旋转,使得推土板34与地面接触,同时两个弧形板37随着推土板34的转动在壳体1的两内侧壁上滑动。
38.具体的,所述引导组件35包括引导电机351、引导辊352、引导座353和多个引导片354,所述引导辊352转动设置在两个弧形板37之间,多个所述引导片354沿引导辊352周向等角度设置在引导辊352的外壁上,所述引导电机351安装在壳体1的侧壁上,且引导电机351的输出端贯穿壳体1的侧壁并向内延伸,所述引导辊352的一端上安装有弧形插接块355,且弧形插接块355与壳体1的内侧壁滑动连接,所述引导电机351的输出端上开设有与弧形插接块355相配合的弧形插接口356,所述引导座353设置在壳体1的内壁上,且引导座353位于推土腔14的上方,引导座353呈倾斜设置,当两个弧形板37在壳体1内滑动时,会带着引导辊352上的弧形插接块355在壳体1的内壁上进行滑动,直至推土板34与地面接触,弧形插接块355滑动至引导电机351上的弧形插接口356相卡接,引导电机351驱动引导辊352带动多个引导片354转动,将挖土片264挖出的泥土引导至壳体1内的推土腔14中,通过引导座353的设置,使得通过引导片354移动至壳体1内的泥土会顺着引导座353倾斜的壁落入推土腔14内。
39.具体的,所述横推组件36包括伸缩气缸361、往复板362、半齿轮363、连接臂364、转动杆365和横推板366,所述横推板366呈竖直滑动设置在壳体1内,且横推板366位于推土腔14内,所述横推板366的顶部呈三角型结构设置,所述往复板362滑动设置在壳体1的外壁上,所述往复板362的底部设有往复齿条367,所述半齿轮363转动设置在壳体1的外壁上,且半齿轮363与往复齿条367相啮合,所述壳体1的外壁上安装有辅助板15,所述伸缩气缸361设置在辅助板15的侧壁上,且伸缩气缸361的输出端贯穿辅助板15与往复板362相连接,所述连接臂364呈竖直位于壳体1的旁侧,且连接臂364的顶部与半齿轮363相连接,所述转动杆365呈水平位于连接臂364与壳体1之间,所述转动杆365的一端贯穿壳体1与横推板366的侧壁滑动连接,且转动杆365的另一端与连接臂364的底部转动连接,所述壳体1的外壁上开设有供转动杆365滑动的弧形口,所述壳体1的两侧壁上均开设有出口,且两个出口均与推土腔14相连通,泥土落入至推土腔14内后,伸缩气缸361驱动往复板362进行来回移动,使与往复板362底部的往复齿条367相啮合的半齿轮363进行往复转动,带动连接臂364以半齿轮363为轴心进行来回摆动,通过转动杆365与横推板366侧壁的滑动连接,使得转动杆365会随着连接臂364的摆动,在横推板366的侧壁上进行上下滑动,同时并带动横推板366在推土腔14内进行来回移动,从而将推土腔14内的泥土来回推动至两个出口处,泥土通过两个出口移动出壳体1,并向壳体1外两侧排出,防止泥土堆积在壳体1的下方以及防火隔离带内。
40.具体的,所述壳体1的两侧壁上均铰接设有闭合门16,且两个闭合门16分别位于两个出口处,两个闭合门16上均设有把手17,通过横推板366推动泥土,将闭合门16打开,使泥土排出,平常闭合门16会将出口封闭住,避免飞虫、飞鸟等通过出口移动至壳体1内,对壳体1内的装置造成故障破坏的情况出现,当要对推土腔14内进行清理时,握住并拉动把手17,即可将闭合门16打开,进行清理。
41.具体的,所述灭火装置4包括水箱41、连接软管42、搭接座43、灭火电机44、主动齿轮45、从动齿轮46、灭火盘47和喷水组件48,所述搭接座43呈水平设置在壳体1的内壁上,且搭接座43位于分隔板11的下方,所述水箱41位于壳体1的上方,且水箱41的底部依次贯穿壳
体1和分隔板11并设置在搭接座43的顶部,所述主动齿轮45与从动齿轮46均转动设置在分隔板11的顶部,且主动齿轮45与从动齿轮46相啮合,所述灭火电机44安装在分隔板11的底部,且灭火电机44的输出端贯穿分隔板11与主动齿轮45相连接,所述壳体1的顶部开设有圆口,所述灭火盘47转动设置在圆口内,且灭火盘47位于从动齿轮46的正上方,所述灭火盘47的底部安装有沿其周向等角度设置的三个立柱49,且每个立柱49的底部均与从动齿轮46相连接,所述喷水组件48设置在灭火盘47的顶部,所述连接软管42呈蛇形位于分隔板11与壳体1之间,所述连接软管42的一端与水箱41相连通,且连接软管42的另一端贯穿灭火盘47与喷水组件48相连通,在水箱41内注入液体,当要进行灭火时,驱动喷水组件48,使水箱41内的液体通过连接软管42移动至喷水组件48并向外喷出,对火源进行灭火工作,同时灭火电机44驱动主动齿轮45转动,带动与主动齿轮45相啮合的从动齿轮46旋转,通过三个立柱49的连接,使得灭火盘47带着喷水组件48随着从动齿轮46的转动而进行旋转,扩大喷水的面积。
42.具体的,所述喷水组件48包括调节座481、弧形滑块482、喷射头483、调节电机484、调节圆盘485、两个延伸板486和两个调节杆487,所述调节座481设置在灭火盘47的顶部,且调节座481呈半圆型结构设置,所述调节座481的两侧壁上均开设有调节口,且弧形滑块482滑动设置在调节口内,所述喷射头483位于调节座481内,且喷射头483的一端贯穿弧形滑块482并向外延伸,喷射头483的另一端与连接软管42相连通,所述调节圆盘485呈竖直位于调节座481内,所述调节电机484安装在调节座481的侧壁上,且调节电机484的输出端贯穿调节座481与调节圆盘485相连接,两个所述延伸板486呈间隔设置在调节圆盘485的外壁上,两个所述调节杆487呈水平位于调节座481内,且两个调节杆487分别设置在两个延伸板486的侧壁上,所述喷射头483位于两个调节杆487之间,驱动喷射头483,使水箱41内的液体通过连接软管42移动至喷射头483并向外喷出,调节电机484驱动调节圆盘485来回转动,使两个调节杆487带着喷射头483和弧形滑块482在调节口内进行来回滑动,即可调节喷射头483的喷射角度,进一步扩大喷水的面积。
43.具体的,所述壳体1的外壁上安装有呈矩形分布的四个移动轮18,所述壳体1的两侧壁上均安装有导土块19,且两个导土块19呈对称设置,每个导土块19均呈倾斜设置,所述壳体1的两侧壁上均安装有蜂鸣器110,所述壳体1的外壁上安装有超声波探测器111,通过移动轮18可带动壳体1进行移动,两个倾斜的导土块19的设置,可将两个出口排出的泥土推离壳体1的两侧,避免排出的泥土堆积在移动轮18的前方,驱动两侧的蜂鸣器110,可避免因火灾而惊慌的动物,冲撞到正在进行挖掘、灭火工作的本装置,超声波探测器111的设置,在进行挖掘工作时,能够及时发现前方的硬物,使本装置进行改道。
44.具体的,所述超声波探测仪111的型号为hy-30。
45.本发明的工作流程:当要进行挖掘防火隔离带时,旋转电机21驱动旋转轴24转动,带动挖土板25以旋转轴24为轴心转动至地面,同时,驱动转动电机31,在同步带33的连接下,使转动轴32随着转动电机31的转动而进行旋转,使得推土板34也与地面接触,并且两个弧形板37随着推土板34的转动在壳体1的两内侧壁上滑动,旋转轴24在转动的同时,也会带动两端的抵触块29在两个移动齿轮27上的抵触口28内进行转动,当挖土板25上的挖土组件26接触地面时,两个抵触块29也会与两个移动齿轮27的另一内侧壁相抵触,挖土电机261驱动挖土辊262转动,带动挖土辊262上的多个挖土片264进行旋转,通过侧壁倾斜的挖土片
264对地面进行挖掘工作,并使挖掘出的泥土向推土板34处飞溅,同时旋转电机21会继续驱动旋转轴24转动,当挖土片264越挖越深时,通过旋转轴24带动两端的抵触块29转动,使得两个抵触块29带着两个相抵触的移动齿轮27进行转动,使移动齿轮27在移动齿条13上进行移动,从而带着旋转轴24和挖土板25沿移动齿条13的方向进行移动,并使旋转轴24带着挖土板25继续转动,使挖土片264能够向斜下方挖掘,从而挖出深度足够的防火隔离带,挖掘完成后,旋转电机21驱动旋转轴24反转,先带动旋转轴24两端的抵触块29在移动齿轮27内转动,直至抵触块29与移动齿轮27的内侧壁相抵触,之后再带动移动齿轮27在移动齿条13上向后移动,直至挖土板25转动至水平状态并收回壳体1内,当两个弧形板37在壳体1内滑动时,会带着引导辊352上的弧形插接块355在壳体1的内壁上进行滑动,直至推土板34与地面接触,弧形插接块355滑动至引导电机351上的弧形插接口356相卡接,引导电机351驱动引导辊352带动多个引导片354转动,将挖土片264挖出的泥土引导至壳体1内的推土腔14中,通过引导座353的设置,使得通过引导片354移动至壳体1内的泥土会顺着引导座353倾斜的壁落入推土腔14内,泥土落入至推土腔14内后,伸缩气缸361驱动往复板362进行来回移动,使与往复板362底部的往复齿条367相啮合的半齿轮363进行往复转动,带动连接臂364以半齿轮363为轴心进行来回摆动,通过转动杆365与横推板366侧壁的滑动连接,使得转动杆365会随着连接臂364的摆动,在横推板366的侧壁上进行上下滑动,同时并带动横推板366在推土腔14内进行来回移动,从而将推土腔14内的泥土来回推动至两个出口处,泥土通过两个出口移动出壳体1,并向壳体1外两侧排出,防止泥土堆积在壳体1的下方以及防火隔离带内,通过横推板366推动泥土,将闭合门16打开,使泥土排出,平常闭合门16会将出口封闭住,避免飞虫、飞鸟等通过出口移动至壳体1内,对壳体1内的装置造成故障破坏的情况出现,当要对推土腔14内进行清理时,握住并拉动把手17,即可将闭合门16打开,进行清理,在水箱41内注入液体,当要进行灭火时,驱动喷射头483,使水箱41内的液体通过连接软管42移动至喷射头483并向外喷出,调节电机484驱动调节圆盘485来回转动,使两个调节杆487带着喷射头483和弧形滑块482在调节口内进行来回滑动,即可调节喷射头483的喷射角度,同时灭火电机44驱动主动齿轮45转动,带动与主动齿轮45相啮合的从动齿轮46旋转,通过三个立柱49的连接,使得灭火盘47带着喷射头483随着从动齿轮46的转动而进行旋转,扩大喷水的面积。
46.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。