1.本发明属于消防的技术领域,具体涉及的是一种船用无人消防车精准消防装置及方法。
背景技术:
2.随着我国海上贸易的逐渐发展,对大型船舶上使用的设备提出了更多、更高的要求。船用消防车作为大型船舶消防专用特种车辆,也必须满足其遂行任务使命的能力,提高车辆装备的质量特性与智能化水平,为保障大型船舶的消防安全提供支撑。
3.我国现有大型船舶使用的消防车主要存在如下问题: 1.无法进行火源点精准定位,需要消防员不断尝试调整炮头的水平、俯仰角度。这个过程不仅效率较低,而且会造成灭火剂的大量浪费,可能会导致灭火剂不足的情况发生。
[0004] 2.车载消防炮多为手动操作方式。消防人员需要全程参与火场的识别、瞄准,工作量较大,若发生火情失控或因火灾产生的二次爆炸容易引起人员伤亡; 3.消防车未接入船面消防系统,无法利用船面消防系统的信息,突发火灾时不能及时获知火灾位置进而延迟火灾救援时间; 4.现有船用消防车多针对单点起火场景,若多个火源点同时起火,没有相应的应对措施; 5.火灾现场不能进行有效监控,无法及时获取火灾现场信息。
[0005]
这些问题导致目前的船用消防车工作效率较低、灭火剂浪费严重、劳动强度及复杂度较大、现场信息无法跟踪监控等问题,有必要设计一种新的消防车精准消防方法来解决上述问题。
技术实现要素:
[0006]
为解决上述问题,本发明提供一种船用无人消防车精准消防装置及方法。
[0007]
本发明的目的是以下述方式实现的:一种船用无人消防车精准消防装置,包括消防车本体,所述消防车本体顶部设置消防车控制箱,消防车控制箱顶部设置双目彩色ccd相机,消防车本体顶部设置消防炮,消防炮上分别设置红外热像仪和紫外火焰探测传感器。
[0008]
所述红外热像仪和紫外火焰探测传感器对称设置在消防炮发射端两侧。
[0009]
一种船用无人消防车精准消防方法,利用上述的一种船用无人消防车精准消防装置进行精准灭火,包括以下步骤:步骤1:消防车自动巡逻并开启火灾自动探测模式,消防炮上的红外热像仪随消防炮旋转进行火灾探测;步骤2:红外热像仪发现可疑目标后,自动开启紫外火焰探测器对火灾进一步确认;步骤3:火灾确认后,双目彩色ccd相机自动转向火灾方位进行火灾现场监控,并将
现场图像传输到消防总控室显示屏;如果船面消防系统监测到车载红外热像仪和紫外火焰探测器检测不到的盲点发生火灾时,可通过消防总控室发出指令,控制消防车到达火场附近,同样调整双目彩色ccd相机对火灾现场进行监控;步骤4:双目彩色ccd相机计算火源中心位置坐标并将火源中心位置坐标值自动传输到消防总控室,若有多处火源则同时将火源中心位置坐标传输到消防总控室;步骤5:消防总控室进行火灾人工确认并通知消防车控制箱进行下一步程序,如果在设定时间内未进行人工确认,消防车控制箱自动进行下一步程序;步骤6:消防车根据获取的火源点位置坐标,自动调整与火源点的距离,确保火源点在消防炮5合适的射程范围内;如果有多处火源点同时起火,消防车自动调整与位置最近的火源点的距离;如果消防总控室有人值守,由值守人员根据火灾现场情况选取合适的火源点后,消防车自动调整与该火源点的位置;步骤7:根据选取的火源中心点位置坐标结合消防炮射流轨迹模型自动计算消防炮需要调整的方位角;步骤8:根据计算的消防炮方位角,由消防车控制箱自动调整消防炮方位并打开电磁阀进行灭火,支持远程遥控操作,必要时可切换至遥控模式,结合现场监控视频,控制消防炮灭火;步骤9:利用彩色ccd摄像机对消防水炮喷射水流进行实时摄像,识别出射流轨迹,得到射流终点,并与火源点进行比较,自动调整消防水炮的喷射角度,使射流落点与火源中心点重合;步骤10:火灾扑灭后,对火源附近进行交叉往返喷射,以降低火场附近温度,防止复燃, 若仍存在其它火源点,重复步骤6~9进行灭火;相对于现有技术,本发明灭火过程中,通过红外热像仪结合紫外火焰探测器进行火灾探测,能够快速发现早期火灾;使用双目彩色ccd相机能够有效监控火场,并且能够精确计算火源中心点的位置坐标,为消防炮提供目标点;根据火源中心点位置坐标和消防炮射流轨迹模型计算消防炮需要调整的方位角,自动调整消防炮方位(支持远程遥控操作,必要时可切换至遥控模式,结合现场监控视频,控制消防炮灭火),省去了复杂的人工操作;消防总控室无人值守时可由消防系统自动开启灭火流程,有人值守时,可根据现场情况参与到灭火流程,提高系统的可靠性;充分考虑船舶火灾的复杂性与多发性,可根据火源点数目,启动不同的应急处理措施;根据射流落点与火源中心点的误差,能够自动校正消防炮的方位角,实现消防闭环;通过将消防车接入船面消防系统,能够对车载火焰探测传感器检测不到的盲点发生火灾时,作出快速反映。本发明实现了大型船舶火场定位、精准扑灭以及实时跟踪灭火,提升灭火作业效率,加快灭火救援速度,减轻了财产损失。
附图说明
[0010]
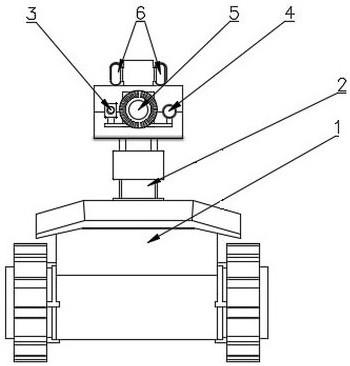
图1是一种船用无人消防车精准消防装置及方法主视图。
[0011]
图2是一种船用无人消防车精准消防装置及方法立体图。
[0012]
图3是一种船用无人消防车精准消防装置及方法的精准消防系统控制流程图。
[0013]
图4是一种船用无人消防车精准消防装置及方法的火灾判定流程图。
[0014]
图5是一种船用无人消防车精准消防装置及方法的消防炮水射流落点精确定位智
能控制原理图。
[0015]
其中,1—消防车本体;2—消防车控制箱;3—红外热像仪;4—紫外火焰探测传感器;5—消防炮;6—双目彩色ccd相机。
具体实施方式
[0016]
下面结合附图和具体实施方式对本发明作进一步详细说明。
[0017]
如附图1到附图2所述的一种船用无人消防车精准消防装置,包括消防车本体1,所述消防车本体1顶部设置消防车控制箱2,消防车控制箱2顶部设置双目彩色ccd相机6,消防车本体1顶部设置消防炮5,消防炮5上分别设置红外热像仪3和紫外火焰探测传感器4。
[0018]
所述红外热像仪3和紫外火焰探测传感器4对称设置在消防炮5发射端两侧。
[0019]
一种船用无人消防车精准消防方法,利用上述的一种船用无人消防车精准消防装置进行精准灭火,包括以下步骤:步骤1:消防车自动巡逻并开启火灾自动探测模式,消防炮上的红外热像仪3随消防炮5旋转进行火灾探测;步骤2:红外热像仪3发现可疑目标后,自动开启紫外火焰探测器4对火灾进一步确认;步骤3:火灾确认后,双目彩色ccd相机6自动转向火灾方位进行火灾现场监控,并将现场图像传输到消防总控室显示屏;如果舰面消防系统监测到车载红外热像仪3和紫外火焰探测器4检测不到的盲点发生火灾时,可通过消防总控室发出指令,控制消防车到达火场附近,同样调整双目彩色ccd相机6对火灾现场进行监控;步骤4:双目彩色ccd相机6计算火源中心位置坐标并将火源中心位置坐标值自动传输到消防总控室,若有多处火源则同时将火源中心位置坐标传输到消防总控室;步骤5:消防总控室进行火灾人工确认并通知消防车控制箱2进行下一步程序,如果在设定时间内未进行人工确认,消防车控制箱2自动进行下一步程序;步骤6:消防车根据获取的火源点位置坐标,自动调整与火源点的距离,确保火源点在消防炮5合适的射程范围内;如果有多处火源点同时起火,消防车自动调整与位置最近的火源点的距离;如果消防总控室有人值守,由值守人员根据火灾现场情况选取合适的火源点后,消防车自动调整与该火源点的位置;步骤7:根据选取的火源中心点位置坐标结合消防炮射流轨迹模型自动计算消防炮5需要调整的方位角;步骤8:根据计算的消防炮5方位角,由消防车控制箱2自动调整消防炮5方位并打开电磁阀进行灭火支持远程遥控操作,必要时可切换至遥控模式,结合现场监控视频,控制消防炮5灭火;步骤9:利用彩色ccd摄像机6对消防水炮5喷射水流进行实时摄像,识别出射流轨迹,得到射流终点,并与火源点进行比较,自动调整消防水炮5的喷射角度,使射流落点与火源中心点重合;步骤10:火灾扑灭后,对火源附近进行交叉往返喷射,以降低火场附近温度,防止复燃, 若仍存在其它火源点,重复步骤6~9进行灭火;本发明的工作过程如下:船用无人消防车1在船面自动巡逻时,固定在消防炮5上
的红外热像仪3和紫外火焰探测器4随消防炮5进行旋转,同时对周围环境进行扫描并对可疑目标进行火灾判定(判定流程见图4),如果判定火灾发生,则启动火灾报警;火灾报警后,双目彩色ccd相机6转向火场并将火场图像传输到消防总控室,同时启动火焰识别定位程序计算火源中心位置坐标;消防总控室室有人值守时,由值守人员进一步确认火灾,并通知消防车控制箱2执行自动灭火程序(灭火流程见图5);如果有多个火源点同时存在,则由值守人员根据现场情况选择灭火顺序;无人值守时,消防车控制箱2自行处理并控制消防炮灭火(灭火流程见图5);如果有多个火源点同时存在,则由消防车控制箱2根据火源中心点位置,由近及远依次灭火;考虑到船面环境复杂,可能出现物体遮挡以及车载火灾探测传感器视角盲点等原因导致消防车无法及时发现火灾,充分利用船面消防系统检测到的火灾信息,由消防总控室操作人员控制消防车赶往火场附近灭火(灭火流程见图5)。
[0020]
以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明整体构思前提下,还可以作出若干改变和改进,这些也应该视为本发明的保护范围。