一种基于分段式pid控制方式的滴灌带生产设备
技术领域
1.本实用新型涉及一种基于分段式pid控制方式的滴灌带生产设备。
背景技术:
2.滴灌带是一种薄壁、中空、管带状聚乙烯灌水器材,其管壁一侧有一次性压合成型的迷宫状流道,横截面形状不规则,管壁两侧的厚度与粗糙度均不相同,质地较软且略有弹性,采用多圈、叠压的方式缠绕成卷。因其属性特殊,产品在收卷过程中受力因素复杂,对收卷张力的控制精度要求较高,按照产品标准,成卷后的产品外型应是规则的圆柱体,卷径超出规定范围、端面直径不一致、内外松紧度不同或表面不平整均不符合要求,不规则的膜卷外形不仅影响自动包装线的正常运行,还会在铺设过程中发生外圈产品脱落,缠绕在放卷轴上,影响播种进度。
3.目前,滴灌带收卷机均采用力矩电机作为动力,当产品的卷径和重量逐渐增加时,电机转速会逐渐下降,此时需人工调整控制器输出电压进行转矩补偿,滴灌带约20分钟生产一件,为了保持适当的张力,操作工生产一件产品需调整张力3次以上,一人同时兼顾8个收卷工位,每个班次调整张力的次数达到100次以上,精神压力和劳动强度都很大,不利于设备的集中控制,同时,滴灌带在收卷过程中具有独特的张力变化规律,如电机启动时需以高速低张力的方式运行,快速将地面堆积的产品缠绕成卷,随后改为低速恒张力方式运行,前后电机转速差达到了1200r/min左右,如转速控制不好易导致滴灌带拉扯形变或受损。此外,员工在进行品检作业时,会对产品施加反向力矩迫使收卷轴停止旋转,这种频繁的外部干扰将导致收卷张力大范围变化,干扰系统的稳定性,影响产品收卷效果。由单一反馈量构成的简单闭环控制方式不能很好的处理类似问题,同时,根据现有可知,运动物体的张力是由于物体在长度方向存在速度差,进而使得物料的不同部分产生相对位移(或形变)而产生存在于物料内部的一种内应力,这种内应力可根据虎克定律计算得出,即:
[0004][0005]
式中:f:张力
[0006]
e:带材的弹性模量
[0007]
δ:带材的截面积
[0008]
l:卷筒与前一单元之间的距离
[0009]
v:线速度
[0010]
综上可知,速度波动是张力波动产生的最根本原因,因此张力控制问题实质是恒速度控制的问题。
[0011]
基于上述分析,本技术设计了一种基于分段式pid控制方式的滴灌带生产设备。
技术实现要素:
[0012]
为了解决上述问题,本技术提供了一种基于分段式pid控制方式的滴灌带生产设
备,利用该设备解决现有滴灌带收卷机存在人员劳动强度大和收卷稳定性差的问题。
[0013]
本实用新型提供了一种基于分段式pid控制方式的滴灌带生产设备,包括收卷轴3和导带辊2,其特征在于,设有张力自控装置,该张力自控装置包含张力传感器4、卷径测量传感器5、控制电机以及pid控制器6,所述pid控制器6内置控制参数,该控制参数包含多段pid调节区间和张力斜率曲线,所述张力传感器4设置在导带辊2上,其用于测量导带辊2上滴灌带9所受张力信号,所述卷径测量传感器5设置在收卷轴3的一侧,其用于测量收卷轴3上所缠绕滴灌带9的卷径信号,所述张力传感器4和所述卷径测量传感器5均与所述pid控制器6的信号输入端连通,所述控制电机与所述pid控制器6的信号输出端连通,所述控制电机的输出频率包含基本频率和调整频率,所述基本频率由所述pid控制器6根据卷径测量传感器5采集的卷径信号来确定,所述调整频率由卷径测量传感器5和张力传感器4共同确定,所述调整频率与基本频率之间的比值决定了控制电机的输出频率。
[0014]
作为本技术的优选方案,所述多段pid调节区间分别对应有不同的pid切换点,且每组pid调节区间内设有张力给定值。
[0015]
作为本技术的优选方案,所述调整频率由卷径测量传感器5和张力传感器4共同调节,具体包含:所述pid控制器6根据卷径测量传感器5采集的卷径信号选择对应的pid切换点并进入对应的pid调节区间,然后利用卷径信号和张力斜率曲线计算出当前pid调节区间内的张力给定值,同时,pid控制器6获取张力传感器4采集的张力信号,将该张力信号与当前pid调节区间内的张力给定值比较来判断滴灌带9当前所受张力大小并利用当前pid调节区间计算出调整频率。
[0016]
作为本技术的优选方案,所述张力斜率曲线为卷径与张力之间的关系曲线,所述张力给定值的取值在该张力斜率曲线上移动。
[0017]
作为本技术的优选方案,所述张力传感器4采用摆杆式张力传感器、法兰式张力传感器或座式张力传感器;和/或,所述卷径测量传感器5采用超声波传感器。
[0018]
作为本技术的优选方案,所述控制电机包含矢量变频器8和减速电机7。
[0019]
与现有技术相比,本技术的优势在于:
[0020]
(1)操作简便,滴灌带9收卷全程均采用闭环自动控制,在收卷过程中保持张力按一定的张力斜率曲线运行,无需工作人员手动调整,降低了工作人员的劳动强度,也提高了设备的自动化水平;
[0021]
(2)采用张力传感器4和卷径测量传感器5作为信号反馈单元,如此,利用张力传感器4和卷径测量传感器5实时反馈的信号可对减速电机7输出频率进行有针对性的调整,提高了滴灌带生产设备的稳定性,同时,采用分段式pid控制方式,实现了控制系统从高速低张力方式向低速恒张力方式平稳过渡,避免转速变化突兀导致滴灌带9拉扯形变或受损。
[0022]
(3)张力反馈量能够承受外界施加的大幅度干扰,电机转速保持恒定或短时间内趋于稳定,也即由张力传感器4、卷径测量传感器5、矢量变频器8、减速电机7以及pid控制器6构成的闭环控制系统的抗干扰性强;
[0023]
(4)张力给定值能够按照张力斜率曲线变化,如此不仅能够实现减速电机7在高低转速之间的平稳过渡,而且能够使得滴灌带9卷绕时内外松紧度适中,膜卷表面和两侧端面平整,产品外观的标准化得以实现,在铺设过程中膜卷表层产品松散脱落的情况也有显著改善;
[0024]
(5)多种传感器和控制方法综合运用,自动化程度高。
附图说明
[0025]
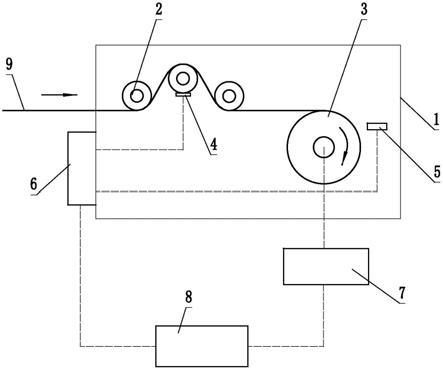
图1为本实用新型实施例提供的基于分段式pid控制方式的滴灌带生产设备的主视结构示意图。
[0026]
图2为本实用新型实施例提供的张力自控装置的控制流程图。
[0027]
附图标记
[0028]
机架1,导带辊2,收卷轴3,张力传感器4,卷径测量传感器5,pid控制器6,减速电机7,矢量变频器8,滴灌带9。
具体实施方式
[0029]
本实施例提供了一种基于分段式pid控制方式的滴灌带生产设备,参见图1,该设备包括收卷轴3、导带辊2和张力自控装置,本实施例中,收卷轴3和导带辊2均固定在机架1的一侧,张力自控装置包含由张力传感器4、卷径测量传感器5、控制电机以及pid控制器6构成的基于分段式pid控制方式的pid闭环控制系统,本实施例中,控制电机包含矢量变频器8和减速电机7,同时,在本实施例中,pid控制器6内置控制参数,该控制参数包含多组pid调节区间、张力斜率曲线、空卷卷径、满卷卷径以及最大线速度等多个参数,多组pid调节区间分别对应有不同的pid切换点,且每组pid调节区间内设有张力给定值,同时,每组pid调节区间内设有独立的调节参数,本实施例中,优选pid切换点为卷径值,该卷径值可为点值或区间值,目前,卷径值最小为7cm,最大为50cm,对应的卷径信号为0-10v或4-20ma,因此本实施例可根据需要选择多段不同的区间,例如,卷径为0-10cm的范围设置为pid切换点a,将卷径为10-20cm的范围设置为切换点b,将卷径为20-40cm的范围设置为pid切换点c,将卷径为40-50cm的范围设置为pid切换点d。
[0030]
本实施例中,张力斜率曲线为多次试验以及日常经验下总结出的卷径与张力之间的关系曲线,同时,在本实施例中,经试验研究张力调整量与卷径存在反比关系,具体地:
[0031]
pid控制器6的控制方法遵循公式:
[0032]
δu=k
pen
+(1/ki)
×
f(∑en)+kdf(e
n-e
n-1
)
[0033]
其中:
△
u:pid控制器6的调整量
[0034]en
:第n次采样时刻的误差值
[0035]kp
:第n次采样时刻的比例项系数
[0036]ki
:第n次采样时刻的积分项系数
[0037]
kd:第n次采样时刻的微分项系数
[0038]
f(∑en):积分项函数
[0039]
f(e
n-e
n-1
):微分项函数。
[0040]
pid控制器6一般包括k
p
、ki、kd三个控制参数的调整,在实际调试过程中发现:在整机张力控制过程中,只要有合适的误差调节速度就可以保证张力稳定,而在过程控制中kd一般设定为零,而ki与一定周期下采集的误差累加值有关,一个合适的ki在卷径变化的情况下对控制结果几乎没有影响,只有k
p
与采集的误差值有关且对控制结果影响比较大,于是就某一时刻的误差调节量可以简化为如下数学模型:
[0041]
△
u≈k
pen
;
[0042]
其中:
[0043]
△
u:pid控制器6的调整量
[0044]en
:第n次采样时刻的误差值
[0045]kp
:第n次采样时刻的比例项系数
[0046]
因为:
△
u=ki△
v/πd,所以:k
pen
=ki△
v/πd。
[0047]
其中:
[0048]ki
:综合系数,其中包含了传动比
[0049]
△
v:线速度调整量
[0050]
d:被驱动对象的直径。
[0051]
由上式我们就可以得出:k
p0en
=ki△
v/πd0,k
p1en
=ki△
v/πd1,进而我们可以推导出两个公式:k
p0
/k
p1
=d1/d0和k
p1
=k
p0
*d0/d1,我们发现k与卷径成反比关系,也即张力斜率曲线为一反比例函数。
[0052]
实际使用时,当卷径小时,可适当将张力调整的大一些;卷径大时,可适当将张力调整的小一些,如此可达到膜卷整体内紧外松的效果。
[0053]
张力传感器4设置在导带辊2上,其用于测量导带辊2上滴灌带9所受张力信号,本实施例优选导带辊2设有三个,张力传感器4设置在位于中间的导带辊2上,卷径测量传感器5设置在机架1上并位于收卷轴3一侧,其用于测量收卷轴3上所缠绕滴灌带9的卷径信号,张力传感器4和卷径测量传感器5均与pid控制器6的信号输入端连通进而构成了双反馈通道,矢量变频器8与pid控制器6的信号输出端连通,并根据pid控制器6的控制指令调节减速电机7的输出转速,本实施例中,减速电机7的输出频率包含基本频率和调整频率,基本频率由pid控制器6根据卷径测量传感器5采集的卷径信号对初始频率调节来确定,具体地,在采集的卷径信号较小时,将初始频率调大些,在采集的卷径信号较大时,将初始频率调小些,调节后的初始频率即为基本频率,本实施例中,初始频率与卷径信号之间的关系或者初始频率所需调节量可通过多次试验获取,并根据需要提前预设在pid控制器6内,调整频率由卷径测量传感器5和张力传感器4共同确定,具体地,pid控制器6根据卷径测量传感器5采集的卷径信号选择对应的pid切换点并进入对应的pid调节区间,例如采集的卷径信号为5.0v时,则选择卷径区间为20-40cm的范围为pid切换点,并进入该pid切换点对应的pid调节区间,然后再利用卷径信号和张力斜率曲线计算出当前pid调节区间内的张力给定值,本实施例中,张力给定值的确定方法包含:根据当前测量的卷径信号(卷径值)获取其在张力斜率曲线上的斜率,然后得出张力值,最后将该张力值与张力给定初始值相加即可获取当前pid调节区间内的张力给定值,同时,pid控制器6获取张力传感器4采集的张力信号,将该张力信号转换为张力值并与获取的张力给定值比较,参见图2,当实时测量的张力值大于张力给定值时,说明滴灌带9当前所受张力较大,需要降低减速电机7的输出频率,因此pid控制器6通过当前pid调节区间计算并生成调整频率,并利用该调整频率与基本频率之间的比值关系进而生成将减速电机7转速降低的输出频率,当实时测量的张力值小于张力给定值时,说明滴灌带9当前所受张力较小,需要增大减速电机7的输出频率,因此pid控制器6通过当前pid调节区间计算并生成调整频率,并利用该调整频率与基本频率之间的比值进而生成将减速电机7转速增加的输出频率;综上可知,本实施例中,卷径测量传感器5采集的卷径信号
主要用于确定基本频率以及选择对应的pid调节区间,如此可实现减速电机7在高低速之间平稳过渡,张力传感器4作为负反馈单元其对滴灌带9当前所受张力以张力给定值作为基值在不断做修正和调整,直至满足或达到所需张力,确保张力满足所需要求。
[0054]
本实施例中,张力传感器4采用摆杆式张力传感器、法兰式张力传感器或座式张力传感器,本实施例优选张力传感器4采用的是摆杆式张力传感器4,该摆杆式张力传感器4体积小,易于安装。
[0055]
本实施例中,卷径测量传感器5采用超声波传感器,本实施例采用超声波传感器作为卷径信号的反馈单元,可提高卷径信号的采集精度。
[0056]
本实施例中,采用减速电机7作为动力,由矢量变频器8作为核心控制单元,如此可提高控制系统的控制精度。
[0057]
本实施例在使用时,将pid控制器6的输出频率分为基本频率和调整频率,其中,基本频率为输出频率的主体,该基本频率决定了收卷张力的主要变化曲线;调整频率为某一特定环节的输出频率起修正作用,具体使用时,张力传感器4和卷径测量传感器5组成了双反馈通道,其分别实时测量滴灌带9所受的张力信号和收卷轴3上滴灌带9的卷径信号,并将采集的张力信号和卷径信号分别传输至pid控制器6,pid控制器6根据卷径测量传感器5采集的卷径信号对初始频率进行调整进而输出基本频率,同时,pid控制器6根据卷径测量传感器5采集的卷径信号选择对应的pid切换点并进入对应的pid调整区间,在该pid调整区间内利用当前采集的卷径信号与张力斜率曲线的关系获取在该pid调整区间内滴灌带9所应受到的张力给定值,然后再将张力传感器4采集的张力信号与张力给定值作比较来判断滴灌带9当前所受张力大小并利用pid控制器6内当前pid调节区间计算出调整频率,最后利用该调整频率与基本频率之间的比进而生成调整减速电机7转速的输出频率,也即在本实施例中,根据卷径信号不仅可选择对应的pid调节区间,而且利用卷径信号还可决定张力给定值在张力斜率曲线上的位置,如此实现了减速电机7在高低转速之间的平稳过渡,张力信号起到了稳定控制器输出的作用,实现了减速电机7恒速控制的问题。
[0058]
综上分析可知,本实施例中的该滴灌带生产设备不仅结构简便、自动化程度高,而且在实际使用时利用张力传感器4和卷径测量传感器5可实现控制系统从高速低张力方式向低速恒张力方式的平稳过渡,避免转速变化突兀易导致滴灌带9拉扯形变或受损的现象,如此提高了系统的抗干扰性和稳定性。
[0059]
以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未做过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型的前提下,还可以做出若干改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。