1.本发明涉及机械抓领域,特别是指一种多自由度夹取式机械抓手。
背景技术:
2.机械手是现有技术中比较高精尖类的机械结构,主要应用在批量的设备组装和流水线作业中,针对机械手的多自由度转轴连接结构,市场上也有很多产品。但是现有技术中的产品,大部分都是全转轴类结构,针对机械抓终端的微调校正,就没有伸入的开发研究,而恰恰是增加微调结构,可以提高抓取的准确性。如何提供上述方案,是我们需要研究的方向。
技术实现要素:
3.本发明提出一种多自由度夹取式机械抓手,解决了现有技术中的问题。
4.本发明的技术方案是这样实现的:
5.多自由度夹取式机械抓手,包括主机座,所述主机座上设置有以竖直转轴为轴转动的主机架,所述主机架上安装有以水平转轴为轴转动的第一连接臂,所述第一连接臂的自由端转动连接有第二连接臂,所述第二连接臂的自由端转动连接有自由端机架,所述自由端机架上安装有可移动的升降板,所述升降板上安装有转动的抓手组件。
6.作为本发明的优选方案,所述主机座下部安装有驱动所述主机架转动的主转轴电机。
7.作为本发明的优选方案,所述主机架上固定有两个对称设置的主支座,所述第一连接臂插接在两主支座之间,所述主支座上固定有驱动所述第一连接臂转动的第一转轴电机。
8.作为本发明的优选方案,所述第一连接臂包括两个对称设置的第一臂架,两第一臂架自由端之间转动连接有第二连接臂,所述第一臂架上安装有驱动所述第二连接臂转动的第二转轴电机。
9.作为本发明的优选方案,所述第二连接臂包括有两个对称设置的第二臂架,两个所述第二臂架自由端上分别连接有对应的自由端支座,两个自由端支座之间固定有副机座内的连接板。
10.作为本发明的优选方案,所述第二臂架自由端上固定有驱动所述自由端机架转动的自由端转轴电机。
11.作为本发明的优选方案,所述连接板外表面上设置有直线模组,所述直线模组内的螺母滑块连接所述升降板。
12.作为本发明的优选方案,所述升降板上表面固定有通过转轴电机驱动转动的副转盘,所述副转盘上对称设置有副支座,两副支座之间固定有固定板。
13.作为本发明的优选方案,所述抓手组件还包括两个对称设置的曲柄连杆机构。
14.作为本发明的优选方案,所述曲柄连杆机构包括转动连接在固定板上的曲柄,所
述曲柄自由端转动连接有夹持臂,一连杆一端转动连接在夹持臂的中部,另一端转动连接在固定板对应位置上。
15.有益效果:
16.多自由度夹取式机械抓手,包括主机座,所述主机座上设置有以竖直转轴为轴转动的主机架,所述主机架上安装有以水平转轴为轴转动的第一连接臂,所述第一连接臂的自由端转动连接有第二连接臂,所述第二连接臂的自由端转动连接有自由端机架,所述自由端机架上安装有可移动的升降板,所述升降板上安装有转动的抓手组件。本发明提供一种多自由度夹取的机械抓手,可以灵活的转动以及对最终位置进行微调,提高整体抓取位置确认的能力和效率,使用安全方便。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
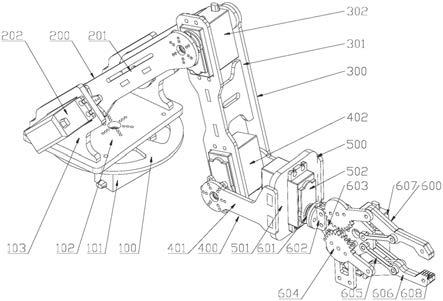
18.图1为本发明立体结构示意图;
19.图2为本发明抓手结构示意图。
20.图中,主机座100,主转轴电机101,主机架102,主支座103,第一连接臂200,第一臂架201,第一转轴电机202,第二连接臂300,第二臂架301,第二转轴电机302,自由端机架400,自由端支座401,自由端转轴电机402,副机座500,连接板501,升降板502,抓手600,副转盘601,副支座602,固定板603,曲柄604,连杆605,夹持臂606,曲柄电机607,橡胶垫608。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.如图1所示的多自由度夹取式机械抓手,包括主机座100,所述主机座100上设置有以竖直转轴为轴转动的主机架102,所述主机架102上安装有以水平转轴为轴转动的第一连接臂200,所述第一连接臂200的自由端转动连接有第二连接臂300,所述第二连接臂300的自由端转动连接有自由端机架400,所述自由端机架400上安装有可移动的升降板502,所述升降板502上安装有转动的抓手组件600。
23.主机座100下部安装有驱动所述主机架102转动的主转轴电机101。
24.主机架102上固定有两个对称设置的主支座103,所述第一连接臂200插接在两主支座103之间,所述主支座103上固定有驱动所述第一连接臂200转动的第一转轴电机202。
25.第一连接臂200包括两个对称设置的第一臂架201,两第一臂架201自由端之间转动连接有第二连接臂300,所述第一臂架201上安装有驱动所述第二连接臂300转动的第二转轴电机302。
26.第二连接臂300包括有两个对称设置的第二臂架301,两个所述第二臂架301自由
端上分别连接有对应的自由端支座401,两个自由端支座401之间固定有副机座500内的连接板501。
27.第二臂架301自由端上固定有驱动所述自由端机架400转动的自由端转轴电机402。
28.连接板501外表面上设置有直线模组,所述直线模组内的螺母滑块连接所述升降板502。
29.升降板502上表面固定有通过转轴电机驱动转动的副转盘601,所述副转盘601上对称设置有副支座602,两副支座602之间固定有固定板603。
30.抓手组件600还包括两个对称设置的曲柄连杆机构。
31.曲柄连杆机构包括转动连接在固定板603上的曲柄604,所述曲柄604自由端转动连接有夹持臂606,一连杆605一端转动连接在夹持臂606的中部,另一端转动连接在固定板603对应位置上。
32.本设计中曲柄通过曲柄电机607驱动转动,在夹持臂的自由端内侧设置有提高夹持稳定的橡胶垫608。此处橡胶垫可以替换为任意防止物料在夹持过程中脱落的结构,如磨砂结构,凹凸结构等。
33.如图2中的曲柄连接机构,曲柄604包括一个转动连接在固定点a上的圆盘,圆盘外缘部分位置设置有外齿,其中一圆盘通过曲柄电机驱动转动,另一圆盘通过外齿啮合完成联动,两圆盘同时完成对称转动。
34.圆盘外缘还一体设有延伸杆,延伸杆的自由端连接一个转轴点c,夹持臂606为一个中部向内侧弯折的夹持结构,夹持臂下端部转动连接在转轴点c处。
35.夹持臂中部弯折点转动连接在转轴点d处,连杆605的一端转动连接在转轴点d处,连杆的另一端转动连接在固定点b上,固定点a和固定点b皆设置在固定板603上。
36.本系统中直线模组为丝杆滑块组件,作为现有技术中已知的结构,具体不再赘述。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。