1.本实用新型涉及机械领域,尤其涉及柜体类物料的抓取工具,特别是一种电动抓手。
背景技术:
2.伴随着工业化、自动化的不断推进,市面上对自动化的设备的需求也越来越旺盛,各种机械结构也层出不穷。在现有的技术中,夹爪无法抓取多种尺寸不一样的物料,而且机器人不能精准地控制夹爪与物料的距离,从而不能准确地将物料抓取,导致工作效率较低,这些问题在产品抓取中,都不可避免。
技术实现要素:
3.本实用新型的目的在于提供一种电动抓手,所述的这种电动抓手要解决现有技术中的电动抓手无法抓取多种尺寸不一样的物料、不能准确地将物料抓取的技术问题。
4.本实用新型的一种电动抓手,包括支撑座,支撑座的下侧间隔设置有两个固定座,两个固定座之间设置有导轨和正反牙丝杆,导轨和正反牙丝杆的长度方向均平行于支撑座的长度方向,正反牙丝杆与固定座转动连接,正反牙丝杆的一端穿出固定座,支撑座上设置有一个伺服电机,伺服电机的输出轴通过传动机构与正反牙丝杆的一端连接,导轨的下侧设置有两个滑块,滑块中设置有一个螺纹孔,两个滑块通过螺纹孔分别设置在正反牙丝杆的正牙和反牙上,滑块的下侧各连接有一个夹爪,两个夹爪相向设置,支撑座的前侧设置有激光测距传感器,激光测距传感器和伺服电机的输入输出端与一个控制器连接。
5.进一步的,所述的传动机构包括第一皮带轮和第二皮带轮,第一皮带轮设置在伺服电机的输出轴上,第二皮带轮设置在正反牙丝杆的一端,第一皮带轮和第二皮带轮之间通过皮带连接。
6.进一步的,所述的第一皮带轮和第二皮带轮均采用同步带轮。
7.本实用新型与现有技术相比,其效果是积极和明显的。本实用新型的一种电动抓手是能够兼容多种长方体形的物料的抓取机构,结构简单、占用空间较小,在相同的使用工况环境下,夹爪开合大小可精准控制,爪间距可变,通过激光测距传感器可检测夹爪与物料之间的距离,使得夹爪可以准确将物料抓取,提高工作效率。
附图说明
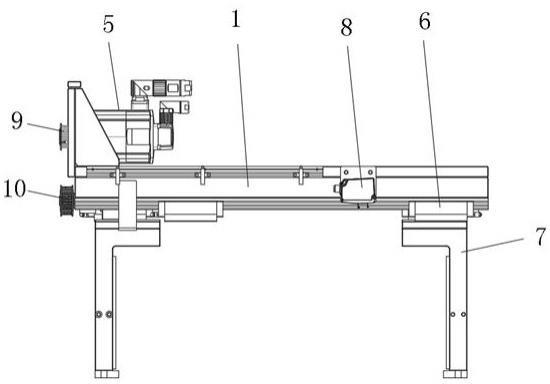
8.图1为本实用新型的一种电动抓手的正视结构示意图。
9.图2为本实用新型的一种电动抓手的俯视结构示意图。
具体实施方式
10.以下结合附图和实施例对本实用新型作进一步描述,但本实用新型并不限制于本实施例,凡是采用本实用新型的相似结构及其相似变化,均应列入本实用新型的保护范围。
本实用新型中的上、下、前、后、左、右等方向的使用仅为了描述方便,并非对本实用新型的技术方案的限制。
11.实施例1
12.如图1和图2所示,本实用新型的一种电动抓手,包括支撑座1,支撑座1的下侧间隔设置有两个固定座2,两个固定座2之间设置有导轨3和正反牙丝杆4,导轨3和正反牙丝杆4的长度方向均平行于支撑座1的长度方向,正反牙丝杆4与固定座2转动连接,正反牙丝杆4的一端穿出固定座2,支撑座1上设置有一个伺服电机5,伺服电机5的输出轴通过传动机构与正反牙丝杆4的一端连接,导轨3的下侧设置有两个滑块6,滑块6中设置有一个螺纹孔,两个滑块6通过螺纹孔分别设置在正反牙丝杆4的正牙和反牙上,滑块6的下侧各连接有一个夹爪7,两个夹爪7相向设置,支撑座1的前侧设置有激光测距传感器8,激光测距传感器8和伺服电机5的输入输出端与一个控制器连接。
13.进一步的,所述的传动机构包括第一皮带轮9和第二皮带轮10,第一皮带轮9设置在伺服电机5的输出轴上,第二皮带轮10设置在正反牙丝杆4的一端,第一皮带轮9和第二皮带轮10之间通过皮带(图中未示)连接。
14.进一步的,所述的第一皮带轮9和第二皮带轮10均采用同步带轮。
15.具体的,本实施例中的导轨3、正反牙丝杆4、伺服电机5、激光测距传感器8、控制器等均采用现有技术中的公知方案,本领域技术人员均已了解,在此不再赘述。
16.伺服电机5通过传动机构、正反牙丝杆4带动两个夹爪7进行开合运动,导轨3用于给夹爪7导向。激光测距传感器8用于检测夹爪7与物料之间的距离。
17.本实施例的工作过程:
18.第一步:机器人带动本抓手移动到物料的正上方,利用激光测距传感器8检测出夹爪7与物料之间的距离并传输给控制器。
19.第二步:根据检测出的距离,机器人带动夹爪7下移相应的距离,移动到取料位置。
20.第三步:伺服电机5通过传动机构和正反牙丝杆4带动夹爪7抓取产品物料。
21.本实用新型的一种电动抓手是能够兼容多种长方体形的物料的抓取机构,结构简单、占用空间较小,在相同的使用工况环境下,夹爪7开合大小可精准控制,爪间距可变,通过激光测距传感器8可检测夹爪7与物料之间的距离,使得夹爪7可以准确将物料抓取,提高工作效率。
技术特征:
1.一种电动抓手,其特征在于:包括支撑座(1),支撑座(1)的下侧间隔设置有两个固定座(2),两个固定座(2)之间设置有导轨(3)和正反牙丝杆(4),导轨(3)和正反牙丝杆(4)的长度方向均平行于支撑座(1)的长度方向,正反牙丝杆(4)与固定座(2)转动连接,正反牙丝杆(4)的一端穿出固定座(2),支撑座(1)上设置有一个伺服电机(5),伺服电机(5)的输出轴通过传动机构与正反牙丝杆(4)的一端连接,导轨(3)的下侧设置有两个滑块(6),滑块(6)中设置有一个螺纹孔,两个滑块(6)通过螺纹孔分别设置在正反牙丝杆(4)的正牙和反牙上,滑块(6)的下侧各连接有一个夹爪(7),两个夹爪(7)相向设置,支撑座(1)的前侧设置有激光测距传感器(8),激光测距传感器(8)和伺服电机(5)的输入输出端与一个控制器连接。2.根据权利要求1所述的一种电动抓手,其特征在于:所述的传动机构包括第一皮带轮(9)和第二皮带轮(10),第一皮带轮(9)设置在伺服电机(5)的输出轴上,第二皮带轮(10)设置在正反牙丝杆(4)的一端,第一皮带轮(9)和第二皮带轮(10)之间通过皮带连接。3.根据权利要求2所述的一种电动抓手,其特征在于:所述的第一皮带轮(9)和第二皮带轮(10)均采用同步带轮。
技术总结
一种电动抓手,包括支撑座,支撑座的下侧间隔设置有两个固定座,两个固定座之间设置有导轨和正反牙丝杆,支撑座上设置有一个伺服电机,伺服电机的输出轴通过传动机构与正反牙丝杆的一端连接,导轨的下侧设置有两个滑块,滑块中设置有一个螺纹孔,两个滑块通过螺纹孔分别设置在正反牙丝杆的正牙和反牙上,滑块的下侧各连接有一个夹爪,两个夹爪相向设置,支撑座的前侧设置有激光测距传感器。本实用新型是能够兼容多种长方体形的物料的抓取机构,结构简单、占用空间较小,在相同的使用工况环境下,夹爪开合大小可精准控制,爪间距可变,通过激光测距传感器可检测夹爪与物料之间的距离,使得夹爪可以准确将物料抓取,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:董晨辉 唐剑 何中泽
受保护的技术使用者:上海晓域电子科技有限公司
技术研发日:2021.08.20
技术公布日:2022/1/28