1.本技术涉及油桶搬运设备的领域,尤其是涉及一种叉车用油桶搬运夹具。
背景技术:
2.目前利用叉车搬运油桶时使用的夹具通常为鹰嘴式夹具,其工作原理是利用提升时的拉力和落地后拉力消失,来实现对油桶边缘的夹持和松开,从而实现油桶的便捷省力搬运。
3.但是这种鹰嘴夹具的长时间使用会对油桶的边缘造成磨损,磨损后鹰嘴夹具就无法对油桶边缘进行夹持,使得磨损后的油桶不能再投入生产使用,进而需要更换新的油桶,降低了油桶的使用寿命,提高了生产成本,有待改进。
技术实现要素:
4.为了保证油桶的正常使用寿命,本技术提供一种叉车用油桶搬运夹具。
5.本技术提供的一种叉车用油桶搬运夹具采用如下的技术方案:
6.一种叉车用油桶搬运夹具,包括一对呈l形设置的支架,一对所述支架并排且平行设置,所述支架包括竖杆和横杆,所述竖杆布置于所述横杆的一端,一对所述竖杆之间水平设置第一连接梁,所述第一连接梁背离一对所述横杆的一侧的两端设置有第一连接杆,所述第一连接杆和所述第一连接梁水平滑动连接,所述第一连接杆远离所述第一连接梁的一端设置有第一弧形杆,且所述第一连接梁上设置有用于驱动一对所述第一连接杆相互靠近或远离的驱动机构。
7.通过采用上述技术方案,当对油桶进行搬运时,首先将一对支架安装在叉车上,然后通过驱动机构驱动一对第一连接杆相互远离,稍后驱动叉车靠近油桶,使油桶位于一对第一弧形杆之间,随后利用驱动机构驱动一对第一连接杆相互靠近,使布置在一对第一连接杆上的一对第一弧形杆相互靠近,进而对油桶进行夹持,最后利用叉车将油桶搬运至指定位置即可。通过设置对油桶侧面进行夹持的叉车用油桶搬运夹具,实现了油桶的便捷搬运,并且不会对油桶造成不可修复的损伤,保证了油桶的正常使用寿命,有效降低了生产成本。
8.可选的,所述驱动机构包括一对螺杆和一对螺母,一对所述螺杆水平布置于所述第一连接梁内部,且一对所述螺杆位于同一条直线上,所述螺杆和所述第一连接梁转动连接,一对所述螺母分别套接于一对所述螺杆并与其螺纹连接,所述第一连接梁的两端均贯通设置有长条形的滑孔,一对所述第一连接杆的一端分别穿设于一对所述滑孔,且分别与一对所述螺母固定连接,所述连接杆上设置有控制一对所述螺杆同步旋转的控制机构。
9.通过采用上述技术方案,当控制一对弧形杆相互靠近或远离时,只需利用控制机构控制一对螺杆旋转,使一对螺母相互靠近或远离,一对螺母带动一对第一连接杆相互靠近或远离,进而带动一对第一弧形杆相互靠近或远离。通过设置结构简单且工作稳定的驱动机构,实现了第一连接杆的稳定驱动,进而实现了第一弧形杆对油桶的稳定夹持。
10.可选的,所述控制机构包括主锥齿轮、电机和一对副锥齿轮,所述主锥齿轮水平布置于所述第一连接梁底壁的中部,一对所述副锥齿轮分别竖直设置于一对所述所述螺杆相互靠近的一端,且所述主锥齿轮和所述副锥齿轮啮合传动,所述电机布置于所述第一连接梁上,且所述电机的输出轴贯穿于所述第一连接梁后与所述主锥齿轮固定连接。
11.通过采用上述技术方案,当驱动一对螺杆旋转时,首先控制电机工作,电机带动主锥齿轮旋转,主锥齿轮带动一对副锥齿轮旋转,进而副锥齿轮带动螺杆旋转,实现螺杆的旋转驱动。通过设置结构简单且工作稳定的控制机构,实现了一对螺杆的同步稳定驱动,保证了一对第一弧形杆对油桶的稳定夹持。
12.可选的,一对所述螺杆的旋向相反,且一对所述螺母旋向也相反。
13.通过采用上述技术方案,通过设置旋向相反的一对螺杆和与之相配合的一对螺母,在主锥齿轮带动一对副锥齿轮运动的过程中,使得一对螺母向相互远离或相互靠近方向同步运动,进而保证了第一弧形杆对油桶的稳定夹持。
14.可选的所述第一连接梁内部设置有位于一对所述副锥齿轮两侧的一对支撑块,所述支撑块上贯通设置有供所述螺杆穿设的通孔,且所述螺杆和所述通孔转动连接,以用于对所述螺杆进行支撑。
15.通过采用上述技术方案,通过设置支撑块对螺杆进行支撑和限位,保证了螺杆的稳定旋转,同时也保证了主锥齿轮和副锥齿轮的稳定啮合。
16.可选的一对所述竖杆之间水平设置有位于所述第一连接梁下方的第二连接梁,所述第二连接梁上设置有气缸,且所述气缸的自由端水平有第二连接杆,所述第二连接杆远离所述气缸的一端设置有第二弧形杆,以通过所述气缸驱动所述第二弧形杆向远离所述第二连接梁的一侧运动,以配合一对所述第一弧形杆对油桶进行夹持。
17.通过采用上述技术方案,当一对布置在第一连接杆上的一对第一弧形杆对油桶进行夹持时,控制气缸工作,气缸推动第二连接杆水平向外滑移,进而布置在第二连接杆上的第二弧形杆再次对油桶进行夹持,进一步保证了搬运夹具对油桶夹持的稳定性。通过设置第二弧形杆对油桶进行夹持,进一步保证了叉车用油桶搬运夹具对油桶夹持的稳定性。
18.可选的,所述第一弧形杆和所述第二弧形杆与油桶相抵触的一侧设置有橡胶垫。
19.通过采用上述技术方案,通过设置橡胶垫,增大了弧形杆与油桶之间的摩擦力,便于弧形杆对油桶进行夹持,同时也对油桶进行了一定的防护,有效避免了油桶的变形。
20.可选的,所述横杆上靠近所述竖杆的一端倾斜设置有用于支撑所述竖杆的支撑杆。
21.通过采用上述技术方案,通过设置支撑杆,保证了竖杆和横杆的连接强度,进而提升了叉车用油桶搬运夹具的整体结构强度。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.通过设置对油桶侧面进行夹持的叉车用油桶搬运夹具,实现了油桶的便捷搬运,并且不会对油桶造成不可修复的损伤,保证了油桶的正常使用寿命,有效降低了生产成本;
24.通过设置结构简单且工作稳定的驱动机构和控制机构,实现了第一弧形杆对油桶的稳定夹持,保证油桶与叉车用油桶搬运夹具连接的稳定性;
25.通过设置第二弧形杆对油桶进行夹持,进一步保证了叉车用油桶搬运夹具对油桶夹持的稳定性。
附图说明
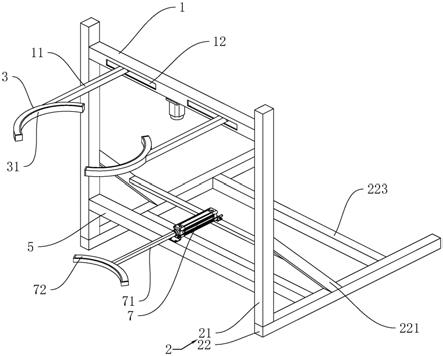
26.图1是本技术实施例的整体结构示意图。
27.图2是本技术实施例中支架与第一连接梁和第二连接梁的连接关系示意图。
28.图3是本技术实施例中第一连接梁和第一连接杆的连接关系示意图。
29.图4是图3中a区域的局部放大示意图。
30.图5是本技术实施例中驱动机构和第一连接杆的连接关系示意图。
31.附图标记说明:1、第一连接梁;11、第一连接杆;12、滑孔;13、支撑块;131、通孔;2、支架;21、竖杆;22、横杆;221、支撑杆;222、安装槽;223、加强杆;3、第一弧形杆;31、橡胶垫;4、驱动机构;41、控制机构;411、主锥齿轮;412、电机;413、副锥齿轮;42、螺杆;43、螺母;5、第二连接梁;6、辅助杆;7、气缸;71、第二连接杆;72、第二弧形杆。
具体实施方式
32.以下结合附图对本技术作进一步详细说明。
33.本技术实施例公开一种叉车用油桶搬运夹具。
34.参照图1,一种叉车用油桶搬运夹具,包括第一连接梁1和一对支架2。支架2呈l形设置,且一对支架2并排且相互平行设置。其中支架2包括竖杆21和横杆22,竖杆21布置于横杆22的其中一端,且竖杆21的下端与横杆22固定连接。同时横杆22靠近竖杆21的一端倾斜向上设置有支撑杆221,且支撑杆221的上端与竖杆21固定连接,下端与横杆22固定连接,以实现竖杆21和横杆22的稳定连接。
35.参照图2,横杆22远离竖杆21的一端端部设置有安装槽222,安装槽222沿横杆22的长度方向设置,以用于实现一对横杆22与叉车的连接,进而实现叉车用油桶搬运夹具与叉车的连接。同时一对横杆22之间水平设置有多个加强杆223,且加强杆223的两端分别与一对横杆22固定连接,以保证一对横杆22的连接稳定性。
36.参照图1、图2,第一连接梁1水平设置于一对竖杆21之间,且位于一对竖杆21的上端之间,连接梁的两端分别与一对竖杆21固定连接。第一连接梁1背离一对横杆22的一侧的两端水平设置有第一连接杆11,且第一连接杆11垂直于第一连接梁1设置。
37.参照图1、图3,第一连接梁1呈中空设置,第一连接梁1的两端分别贯通设置有供第一连接杆11穿设滑移的滑孔12,滑孔12呈长条形设置,且沿第一连接梁1的长度方向设置。同时第一连接杆11远离连接梁的一端水平设置有与油桶侧壁相匹配的第一弧形杆3,以在一对第一连接杆11相互靠近的时候对油桶进行夹持,实现油桶的便捷搬运。
38.参照图1、图3,第一弧形杆3与油桶侧壁相抵触的一侧固定连接有橡胶垫31,以用于增大第一弧形杆3与油桶之间的摩擦力,便于对油桶进行夹持搬运,同时也对油桶起到了一定的防护作用,防止油桶在第一弧形杆3的夹持下变形。
39.参照图4、图5,连接梁内部设置有驱动机构4,驱动机构4用于驱动一对第一连接杆11相互靠近或远离,从而实现第一弧形杆3对油桶的夹持。驱动机构4包括控制机构41、一对螺杆42和一对螺母43。其中控制机构41用于控制一对螺杆42同步旋转。
40.参照图4、图5,控制机构41包括主锥齿轮411、电机412和一对副锥齿轮413。主锥齿轮411水平设置于第一连接梁1底壁的中部,且主锥齿轮411和第一连接梁1转动连接。电机412固定设置于第一连接梁1的下端面,且电机412的输出轴竖直向上贯穿于第一连接梁1后
与主锥齿轮411固定连接,一对螺杆42水平设置于第一连接梁1内,且分布于主锥齿轮411的两侧。一对螺杆42相互背离的一端分别与第一连接梁1的两端转动连接,一对副锥齿轮413分别布置于一对螺杆42相互靠近的一端,且一对副锥齿轮413均与主锥齿轮411啮合传动,以通过主锥齿轮411带动一对副锥齿轮413同步旋转。
41.参照图4、图5,一对螺母43分别套接于一对螺杆42并与其螺纹连接,且一对第一连接杆11穿设滑孔12的一端分别与一对螺母43固定连接。其中一对螺杆42的旋向相反,且与一对螺杆42相螺纹连接的一对螺母43旋向也相反,以在一对螺杆42同步旋转的过程中驱动一对螺母43相互靠近或相互远离。
42.因此,当控制一对第一弧形杆3相互靠近时,首先启动电机412,电机412驱动主锥齿轮411旋转,电机412驱动主锥齿轮411旋转,主锥齿轮411带动一对斜锥齿轮同步旋转,进而一对斜锥齿轮带动一对螺杆42旋转,使与一对螺杆42螺纹连接的一对螺母43相互靠近,进而带动一对第一连接杆11相互靠近,从而使一对第一弧形杆3相互靠近。
43.当控制一对第一弧形杆3相互远离时,控制电机412反向旋转,即可使一对第一弧形杆3相互靠近。
44.参照图1,第一连接梁1的顶壁上固定设置有一对支撑块13,一对支撑块13分别位于一对副锥齿轮413的两侧,且支撑块13上贯通设置有供螺杆42穿设的通孔131,从而对螺杆42进行支撑,保证螺杆42的稳定旋转。
45.参照图1、图2,一对竖杆21的下端之间水平设置有第二连接梁5,第二连接梁5垂直于一对竖杆21设置,且第二连接梁5的两端分别与一对竖杆21固定连接。一对支撑杆221之间水平设置有辅助杆6,且辅助杆6的两端分别与一对支撑杆221固定连接,以进一步提高一对支架2之间的连接强度。
46.参照图1、图2,第二连接梁5和辅助杆6上固定设置有气缸7,气缸7的固定端与第二连接梁5和辅助杆6固定连接,气缸7自由端的末端水平设置有第二连接杆71,第二连接杆71平行于第一连接杆11设置,第二连接杆71远离气缸7自由端的一端设置有与油桶侧壁相匹配的第二弧形杆72,以对油桶进行进一步夹持。
47.因此,当一对第一弧形杆3相互配合完成对气缸7的夹持工作时,此时可以控制气缸7工作,利用气缸7驱动第二连接杆71向外运动,使第二弧形杆72抵触油桶,从而配合一对第一弧形杆3完成对油桶的夹持工作,保证叉车用油桶搬运夹具对油桶的稳定夹持运输。
48.参考图1、图2,第二弧形杆72与油桶侧壁相抵触的一侧固定连接有橡胶垫31,以用于增大第二弧形杆72与油桶之间的摩擦力,便于对油桶进行夹持搬运,同时也对油桶起到了一定的防护作用,防止油桶在第一弧形杆3和第二弧形杆72的共同夹持作用下变形。
49.本技术实施例一种叉车用油桶搬运夹具的实施原理为:当对油桶进行搬运时,首先将一对支架2与叉车安装在一起,随后启动电机412,电机412驱动主锥齿轮411旋转,主锥齿轮411带动一对斜锥齿轮同步旋转,进而一对斜锥齿轮带动一对螺杆42旋转,使与一对螺杆42螺纹连接的一对螺母43相互远离,进而带动一对第一连接杆11相互远离,然后驱动叉车靠近油桶,使油桶位于一对第一弧形杆3之间。
50.随后再次启动电机412,控制电机412反向旋转,使一对第一弧形杆3相互靠近并对油桶进行夹持。当一对第一弧形杆3相互配合完成对气缸7的夹持工作时,控制气缸7工作,驱动第二连接杆71向外运动,使第二弧形杆72抵触油桶,从而配合一对第一弧形杆3完成对
油桶的夹持工作,最终完成对油桶的夹持工作。
51.最后利用叉车将油桶搬运至指定位置,完成油桶的搬运工作。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。