1.本实用新型属于立体仓库技术领域,具体涉及的是一种立体仓库用输送系统。
背景技术:
2.现有的立体仓库主要是由货架、堆垛机和输送机组成,堆垛机将输送机上的货箱运送到相对应的货架上。但是由于仓库面积基本比较大,输送机较长,在货箱进行输送时,若货箱较多,堆垛机搬运不及时,造成货箱堆积,给工作人员带来额外工作,降低了工作效率,并且较长的输送机只要在输送状态便呈开启状态,对于较少数的货箱输送来说,输送机一直开启会造成机器的浪费,电的浪费等,不符合降本增效的理念。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺点,提供一种立体仓库用输送系统,解决了传统立体仓库中对货箱的输送易造成货箱堆积、降低效率或者造成浪费等技术问题。
4.为了解决上述问题,本实用新型的技术方案为:一种立体仓库用输送系统,其中:所述立体仓库包括并排设置的若干货架组,所述货架组包括并排设置的两组货架,两组货架之间设置有巷道,所述巷道内地面中部设置有前后方向的输送轨道;
5.所述输送系统包括若干组巷道堆垛机、若干组输送机、若干组监控装置和控制系统,每一巷道中的输送轨道上均安装有所述巷道堆垛机,若干组所述输送机左右方向并排设置于货架组前侧,所述输送机和货架组一一对应,所述输送机的输送方向与输送轨道方向垂直;所述输送机前侧设置有推箱装置,所述推箱装置将货箱推至巷道堆垛机上,所述巷道堆垛机将货箱送至货架上;
6.每一组所述输送机上均设置有所述监控装置,所述监控装置包括第一接近开关、第二接近开关和第三接近开关,所述第一接近开关设置于巷道堆垛机左侧的输送机顶面前侧,所述第二接近开关设置于巷道堆垛机右侧的输送机顶面前侧,所述第三接近开关设置于输送机后侧壁与巷道堆垛机相对的位置处;
7.所述控制系统分别与输送机、巷道堆垛机、推箱装置、第一接近开关、第二接近开关和第三接近开关之间电气连接。
8.进一步,所述输送机为链式输送机。
9.进一步,所述推箱装置包括固定座和水平设于固定座顶面的推动电缸,所述固定座设于输送机前侧壁上,所述推动电缸的活塞杆朝向输送机,所述推动电缸的活塞杆端部设置有竖直推动板。
10.进一步,所述巷道堆垛机的载物台后端设置有第四接近开关,所述第四接近开关与控制系统电气连接。
11.进一步,相邻两组所述输送机之间的距离设置为20mm~30mm。
12.与现有技术相比,本实用新型的有益效果:
13.本实用新型通过设置多组输送机,输送机和巷道堆垛机一一对应,通过监控装置
和控制系统的配合,实现了对货箱的自动化输送,多组输送机既各自独立又相互关联的进行开启工作,通过货箱的位置控制下一组输送机的开启,保证了货箱在输送机上的连续性,也避免了全部输送机同时工作造成的浪费,达到了降本增效,巷道堆垛机分别对其相对应的输送机上的货箱进行输送,多组巷道堆垛机进行交替输送,避免了货箱在一组输送机上进行堆积,结构简单,自动化程度高,降低了人工成本并且增加了效率。
附图说明
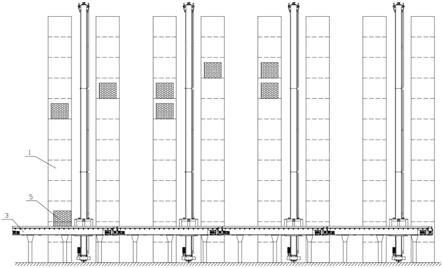
14.图1为本实用新型的结构示意图;
15.图2为图1的俯视图;
16.图3为图1的左视图。
具体实施方式
17.下面结合附图和实施例对本实用新型作进一步的详细描述。
18.如图1至3所示的一种立体仓库用输送系统,其中:所述立体仓库包括并排设置的若干货架组,所述货架组包括并排设置的两组货架1,两组货架1之间设置有巷道1-1,所述巷道1-1内地面中部设置有前后方向的输送轨道1-2;输送轨道1-2与货架1平行设置。
19.所述输送系统包括若干组巷道堆垛机2、若干组输送机3、若干组监控装置和控制系统,每一巷道1-1中的输送轨道1-2上均安装有所述巷道堆垛机2,若干组所述输送机3左右方向并排设置于货架组前侧,所述输送机3和货架组一一对应,所述输送机3的输送方向与输送轨道1-2方向垂直;所述输送机3前侧设置有推箱装置4,所述推箱装置4将货箱5推至巷道堆垛机2上,所述巷道堆垛机2将货箱5送至货架1上;巷道堆垛机2可以将货箱5输送至其两侧的货架1上,也可将货架1上的货箱5进行运输搬离,每一组巷道堆垛机2均从其相对应的输送机3上进行获取货箱5。
20.每一组所述输送机3上均设置有所述监控装置,所述监控装置包括第一接近开关6-1、第二接近开关6-2和第三接近开关6-3,所述第一接近开关6-1设置于巷道堆垛机2左侧的输送机3顶面前侧,所述第二接近开关6-2设置于巷道堆垛机2右侧的输送机3顶面前侧,所述第三接近开关6-3设置于输送机3后侧壁与巷道堆垛机2相对的位置处;第一接近开关6-1、第二接近开关6-2和第三接近开关6-3共同作用,检测货箱5的位置,也控制下一输送机3的开启。第一接近开关6-1用于检测货箱5的位置,第三接近开关6-3用于检测巷道堆垛机2是否处于初始状态,第一接近开关6-1和第三接近开关6-3的共同作用来控制推动电缸4-2是否开启,第二接近开关6-2通过检测货箱5的位置开控制与其相邻的输送机3是否开启。
21.所述控制系统分别与输送机3、巷道堆垛机2、推箱装置4、第一接近开关6-1、第二接近开关6-2和第三接近开关6-3之间电气连接。
22.进一步,所述输送机3为链式输送机。
23.进一步,所述推箱装置4包括固定座4-1和水平设于固定座4-1顶面的推动电缸4-2,所述固定座4-1设于输送机3前侧壁上,所述推动电缸4-2的活塞杆朝向输送机3,所述推动电缸4-2的活塞杆端部设置有竖直推动板4-3。竖直推动板4-3的设置,使得货箱5在推动的过程中不会倾斜,更加平稳。
24.进一步,所述巷道堆垛机2的载物台2-1后端设置有第四接近开关6-4,所述第四接
近开关6-4与控制系统电气连接。当第四接近开关6-4感应到货箱5时,将信号传出给控制系统,控制系统控制巷道堆垛机2进行输送,将其送至指定位置。
25.进一步,相邻两组所述输送机3之间的距离设置为20mm~30mm。距离的设置既不影响货箱5的输送也不会使相邻两组输送机3相互干扰。
26.如图2所示,货箱5的输送方向为从左往右,初始状态时巷道堆垛机2均处于输送轨道1-2前端,货箱5在最左侧输送机3上进行输送,当第一接近开关6-1感应到货箱5的位置时,第一接近开关6-1将信号传输给控制系统,货箱5继续向右移动一定距离达到推箱装置4所对应位置处时,输送机3停止工作,控制系统控制推动电缸4-2工作,推动电缸4-2的活塞杆带动竖直推动板4-3对货箱5进行推动,将货箱5推至巷道堆垛机2的载物台2-1上,第四接近开关6-4感应到货箱5时,将信号传输给控制系统,同时输送机3开始进行新的输送,控制系统控制巷道堆垛机2进行输送,将其送至指定位置。
27.继续进行货箱5的输送,货箱5在最左侧输送机3上进行输送,当第一接近开关6-1感应到货箱5的位置、第三接近开关6-3没有感应到巷道堆垛机2时,推动电缸4-2不开启工作,货箱5继续向右移动,当第二接近开关6-2感应到货箱5时,控制系统控制其右侧的输送机3开始工作,货箱5输送到另一输送机3上,另一输送机3上的第一接近开关6-1对货箱5进行感应,其工作过程同上述过程,依次进行输送。
28.第三接近开关6-3对巷道堆垛机2的位置进行监测,若巷道堆垛机2在其初始位置,货箱5便从最先经过的巷道堆垛机2进行输送,若巷道堆垛机2在搬运过程中不在初始位置,货箱5便进行输送至下一输送机3,多组输送机3和巷道堆垛机2的配合,不会出现货箱5堆积,自动化程度高,并且输送机3进行间歇性的开启,无需全部启动,降低了成本。