1.本发明涉及一种用于电梯系统中电梯轿厢的自动救援操作的方法和系统,其中该方法和系统旨在从电池汲取有限量的电力,同时保持乘坐舒适性要求。
背景技术:
2.如果在停电期间电梯轿厢在楼层之间停止,则通常使用电梯自动救援操作,使用电池供电的救援装置从电池向电梯供应电力。
3.传统上,现场技术人员前往电梯现场并使用手动制动杆打开提升机制动器,这允许电梯轿厢通过重力漂移至层站。该解决方案仅适用于电梯轿厢负载不平衡的情况。在平衡的轿厢负载的情况下,还需要单独的提升机(例如tirak)来移动电梯轿厢。因此,这种救援操作缓慢且费力。
4.因此,已经开发了用于自动救援操作的解决方案。传统的解决方案是使用修正运行曲线将电梯轿厢移动到下一个可用的层站。由于供电中断,驱动系统可能已失去电机同步。
5.因此,控制系统必须在移动之前重新同步提升机的电动机。此同步过程从电池获取电力。随后,在打开机械制动器之前,根据电梯轿厢称重信息对提升机的电动机施加预转矩。
6.当所述电动机试图在启动阶段期间防止电梯轿厢在不平衡负载条件下移动时,所述电动机消耗相当多的功率。当电梯轿厢以非常低的速度准确地停在目标楼层时,会出现相同的高功率峰值。在救援运行的恒定速度阶段,电梯不平衡向电机和机械制动器提供动力,因为电动机充当发电机。
7.ep2448854b1描述了功率受限电梯救援操作中的重力驱动启动阶段。具体而言,当电梯系统的主电源失去时,使用来自备用电源的电力执行自动运行。停止在楼层之间的电梯的救援运行是通过提升制动器并允许电梯轿厢在重力作用下移动来启动的。如果由于轿厢和配重之间的重量不平衡而导致轿厢移动,则提升电机的操作与感应到的轿厢移动同步以发电。如果重量平衡,使得轿厢不移动,则向提升电机提供备用电力,以在救援运行期间施加电机转矩以沿选定方向驱动轿厢。
8.ep3210922b1公开了一种用于顺利救援的电梯运行曲线修改。所述方法包括当外部电源不可用时使用电池为电梯系统供电。该方法还包括响应于选定的减速度,使用控制器确定电梯轿厢的运行曲线。该方法另外包括使用控制器响应于所确定的运行曲线来操作电梯轿厢,以及使用控制器确定电梯轿厢的实际速度。这些解决方案的问题在于,在电梯轿厢的启动过程期间,从电池装置汲取大量电力。
9.救援驱动装置的尺寸和成本很大程度上取决于额定功率和可用的电池容量。到目前为止,救援驱动装置的高相关成本和/或大尺寸已经减少了其在大容量电梯中的使用。
技术实现要素:
10.因此,本发明的目的是提供一种用于电梯系统中的电梯轿厢的自动救援操作的方法和系统,与传统系统相比,该方法和系统能够以降低的功率需求来移动电梯轿厢。同时,包括平稳运行曲线的电梯轿厢的救援操作是期望的。
11.通过本发明的解决方案,可以使用更小、功率更小和/或更便宜的电梯救援驱动装置。替代地,在正常电梯运行之外,还可以使用带有集成电池的变频器等普通电梯驱动单元作为救援驱动装置。
12.为解决上述目的,本发明提供一种用于电梯系统中电梯轿厢的自动救援操作的方法,所述电梯系统还包括提升机和向提升机和/或提升机制动器提供功率信号的电池供电的救援驱动装置。
13.该方法包括通过负载传感器收集电梯轿厢负载信息的步骤。该方法还包括由救援驱动装置基于电梯轿厢负载信息选择第一救援运行或第二救援运行的步骤,其中,所述第一救援运行包括从救援驱动装置的电池向提升机的电动机和/或提升机制动器供应电力以启动电梯轿厢的移动。
14.所述第二救援运行包括使提升机的电动机的绕组短路以对电动机施加动态制动,其中如果电梯轿厢负载在电梯轿厢额定负载的第一范围内,则选择第一救援运行,并且其中如果电梯轿厢负载在电梯轿厢额定负载的第二范围内,则选择第二救援运行。
15.此外,本发明提供了一种用于电梯系统中电梯轿厢的自动救援操作的系统,所述电梯系统还包括提升机和电池供电的救援驱动装置,其被配置为向提升机和/或提升机制动器提供功率信号,其中负载传感器配置为收集电梯轿厢负载信息,并且救援驱动装置配置为根据电梯轿厢负载信息选择第一救援运行或第二救援运行。
16.所述第一救援运行包括从救援驱动装置的电池向提升机的电动机和/或提升机制动器供应电力以启动电梯轿厢的移动,并且其中所述第二救援运行包括使提升机的电动机的绕组短路以施加电动机的动态制动。
17.电池供电的救援驱动装置还配置为如果电梯轿厢负载在电梯轿厢额定负载的第一范围内,则选择第一救援运行,并且其中,电池供电的救援驱动装置配置为如果电梯轿厢负载在电梯轿厢额定负载的第二范围内,则选择第二救援运行。
18.通过提供分别基于所收集的电梯轿厢负载信息在预定范围内而选择的第一救援运行和第二救援运行,电池供电的救援驱动装置的电池电力仅在指定条件下被请求。
19.根据本发明的另一方面,如果电梯轿厢负载在电梯轿厢额定负载的25%至75%内,则选择第一救援运行,并且其中,如果电梯轿厢负载在电梯轿厢额定负载的0%至25%或75%至100%内,则选择第二救援运行。
20.在电梯轿厢负载在电梯轿厢额定负载的25%至75%范围内的情况下,电梯轿厢因此处于基本平衡状态,因此需要电动机支持来移动。
21.相比之下,当电梯轿厢负载在0%到25%或75%到100%范围内时,电梯轿厢处于基本不平衡状态,这意味着一旦提升机制动器打开,电梯轿厢就会因重力而开始自行移动。
22.根据本发明的另一方面,在第一救援运行开始时,从电池供电以解析(resolve)提升机的电动机的转子极位置,并且其中功率信号被提供给提升机的电动机以在提升机制动器打开之前产生预转矩。优选地,转子极位置如ep2269297b1中公开的那样通过从电池向电
动机的绕组提供第一和第二旋转电压或电流激励信号(第一和第二旋转电压或电流激励信号在其旋转方向上被拟合成具有相反方向)、分别确定第一和第二电流或电压响应信号以及根据所述响应信号确定转子极位置(即ep2269297b1中的电机转子的位置)来解析。
23.所述预转矩是在提升机制动器打开时由提升机的电动机产生的转矩(其大小能够补偿电梯轿厢负载),使得在电动机提供足够的转矩之前,电梯轿厢不会由于重力而自行移动。
24.根据本发明的另一方面,通过从电池向制动器一个接一个地提供电力,特别是拾取功率,来打开提升机制动器,其中,在打开制动器之后,制动器的电力供应被降低到保持制动器打开所需的预定水平。
25.术语“拾取功率”是指用于拾取(即打开提升机制动器)所需的功率水平,其中拾取功率高于在它们被拾取后保持制动器打开所需的功率。
26.这样,由于一次只需要为一个制动器提供拾取功率而不是为多个或所有制动器提供拾取功率,因此可以减少从电池提供的拾取功率。
27.根据本发明的另一方面,在第一救援运行期间,在打开提升机制动器之后,电力从电池供应给制动器和提升机的电动机以将电梯轿厢朝向层站驱动。因此,电梯轿厢可以根据预选的救援运行运动曲线通过救援驱动装置被驱动到层站。这样,电梯轿厢会准确地停在层站,乘客可以安全地离开电梯轿厢。
28.根据本发明的另一方面,在第二救援运行中,通过激活电机动态制动来启动电梯轿厢的移动,其中所有电机相位使用电机逆变器功率晶体管连接在一起(即短路),随后提升机制动器逐个打开。在提升机制动器打开后,由于明显的不平衡,电梯轿厢因此开始靠重力移动。
29.为了降低轿厢加速度,因此将提升电机的绕组短路以对提升电机施加动态制动。绕组的短路在移动的提升电机的绕组中产生电流,该电流引起制动转矩。当绕组短路且提升电机旋转时,提升电机的转子极位置由提升电机的例如电流、电压和/或电感等操作参数来解析。优选地,转子极位置通过使用数学模型来解析。数学模型可以与us9758342b2的公式(3)中的相同。
30.根据本发明的另一方面,在第二救援运行的第一模式中,启用动态制动,提升机的电动机的测量速度小于阈值速度并且电梯轿厢的速度控制被禁用,其中电梯轿厢的速度增加,直到提升机的电动机的动态制动转矩满足负载转矩,从该点向前,速度将基本恒定。
31.因此,可以有利地控制电梯轿厢以预定的基本恒定速度行进。此外,电机转矩为零或与电梯轿厢的行进方向相反,使得电动机通过再生电能来制动电梯轿厢。
32.根据本发明的另一方面,在第二救援运行的第二模式中,禁用动态制动,提升机的电动机的测量速度小于阈值速度,启用电梯轿厢的速度控制,并且速度参考被设置为等于电梯轿厢的测量速度。
33.此外,如果需要,可以通过限制速度参考的变化率来限制加速度。此外,电机转矩为零或与电梯轿厢的行进方向相反,使得电动机通过再生电能来制动电梯轿厢。
34.根据本发明的另一方面,在第二救援运行的第三模式中,提升机的电动机的测量速度大于或等于阈值速度,启用电梯轿厢的速度控制,并且速度参考被设置成使得电梯轿厢的加速度是连续的并且是限速的,其中电梯轿厢的最终速度是期望的救援速度。
35.电动机的电机转矩与电梯轿厢的行进方向相反。因此,电动机通过再生电能来制动电梯轿厢。
36.根据本发明的另一方面,如果电梯定位系统指示电梯轿厢的位置在门区区域的边缘,则从电池汲取电力以在提升机的电动机中产生制动转矩。为避免在减速阶段从电池汲取过多电流,电机转矩参考或电机电流参考可以被限制为与当测量的电池电流或测量的电池功率超过定义的电池电流限制或电池功率限制时的电机转矩参考或电机电流参考相同的值。
37.根据本发明的另一个方面,在第二救援运行中,为了降低提升机制动器打开后电梯轿厢的加速度,将提升机的电动机的绕组短路,以对提升机的电动机施加动态制动。降低功率救援运行包括在动态断开期间根据旋转的提升电机的操作参数来解析提升电机的转子极位置。术语“提升电机”和“提升机的电动机”被认为是同义词。
38.根据本发明的另一方面,救援驱动装置通过电机编码器确定电梯轿厢的速度,并且当电梯轿厢的速度超过预定阈值时,通过启动对提升机电动机的逆变器的功率晶体管的调制来启动再生制动。当再生制动开始时,动态制动自然停止。
39.根据本发明的另一方面,在提升机的电动机的再生制动期间,救援驱动装置操作电梯轿厢的速度控制回路,使得电梯轿厢根据预定的速度曲线朝向层站移动。
40.如果电梯轿厢没有在从第二救援运行中打开制动器设定的特定时间窗口内开始移动,或者如果电梯轿厢速度在降低功率救援运行期间以其他方式偏离期望速度,使得电梯轿厢不会到达层站,则救援运行装置向远程服务中心发出服务呼叫,以解决操作异常和/或从轿厢中救出乘客。
41.根据本发明的另一方面,在第二救援运行结束时,测量电梯轿厢到层站的距离,其中当测量的距离小于预定的制动器下降极限时生成制动器下降命令。
42.选择制动器下降极限,以便及时启动制动器,使轿厢尽可能准确地停止到层站。因此,在计算制动下降极限时至少要考虑以下参数:制动器下降情况下的轿厢速度、制动器下降延迟,以及制动距离。
43.根据本发明的另一方面,在第二救援运行中,在电动机的动态制动期间,由旋转电动机的操作参数解析提升机的电动机的转子极位置。
44.此处描述的用于电梯系统中的电梯轿厢的自动救援操作的方法的特征还针对用于电梯系统中的电梯轿厢的自动救援操作的系统而公开,反之亦然。
附图说明
45.为了更完整地理解本发明及其优点,现在结合附图参考以下描述。下面使用在附图的示意图中详细说明的示例性实施例更详细地解释本发明,其中:
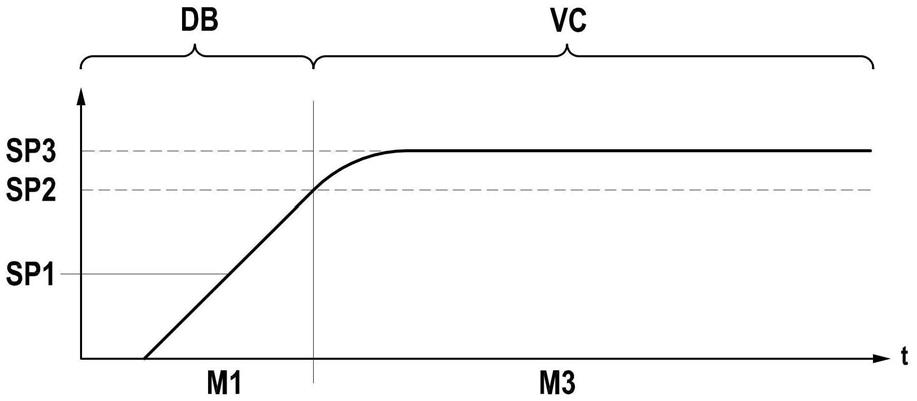
46.图1示出了在根据本发明实施例的自动救援操作期间的电梯速度曲线图;
47.图2示出了在根据本发明实施例的自动救援操作期间的电梯速度曲线图;
48.图3是根据本发明实施例的在电梯负载转矩为25%时的轿厢位置、轿厢速度、制动转矩和电机转矩的曲线图;以及
49.图4是根据本发明实施例的在电梯负载转矩为0%时的轿厢位置、轿厢速度、制动转矩和电机转矩的曲线图。
50.除非另有说明,图中相同的参考标记或符号表示相同的元件。
具体实施方式
51.图1示出了当电梯轿厢负载低于电梯轿厢额定负载的25%或高于额定负载的75%时在自动救援操作期间电梯速度曲线的示例性实施例。该图示出了在动态制动期间提升机12的电动机12a的速度达到阈值速度sp2的情况。
52.在第二救援运行的第一模式m1中,启用动态制动db,提升机12的电动机12a的测量速度sp1小于阈值速度sp2并且禁用电梯轿厢10的速度控制vc。
53.电梯轿厢10的速度cv增加,直到提升机12的电动机12a的动态制动转矩满足负载转矩,从而达到恒定速度cv。
54.在第二救援运行r2的第三阶段m3中,提升机12的电动机12a的测量速度sp1大于或等于阈值速度sp2,启用电梯轿厢10的速度控制vc,并且速度参考被设置为使得电梯轿厢10的加速度是连续的并且是限速的,其中电梯轿厢10的最终速度是期望的救援速度cv。
55.图2示出了电机速度由于动态制动而饱和的情况。启用动态制动,并且测得的电机速度低于阈值速度sp2。在此模式下,速度控制被禁用。电梯速度因重力而加速。
56.电梯轿厢10的速度增加直到电机动态制动转矩满足负载转矩,从而达到恒定速度。电机转矩为零或与行进方向相反,使得电梯轿厢10通过其自身再生电能而被提升机的电动机制动。
57.随后使用所描述的模式2。禁用动态制动,并且测得的电机速度sp1低于阈值sp2。电梯因重力而加速。在这种模式下,速度控制被启用,速度参考设置为等于测得的速度sp1。
58.随后,如果电机速度sp1等于或高于阈值速度sp2,则使用第三模式m3。启用速度控制并形成速度参考,使得加速是连续的并且是限速的,最终速度是期望的救援速度sp3。电机转矩与行进方向相反,即电梯轿厢通过再生电能被提升机的电动机制动。
59.图3是根据本发明实施例的在电梯负载转矩为25%时的轿厢位置、轿厢速度、制动转矩和电机转矩的曲线图。
60.描绘了用于电梯系统1中的电梯轿厢10的自动救援操作的系统和方法。所述电梯系统1还包括提升机12和向提升机12和/或提升机制动器16提供功率信号的电池供电的救援驱动装置14。该方法包括通过负载传感器18收集电梯轿厢负载信息。此外,该方法包括基于电梯轿厢负载信息,由救援驱动装置14选择第一救援运行r1或第二救援运行r2。
61.所述第一救援运行r1包括从救援驱动装置14的电池20向提升机12的电动机12a和/或提升机制动器16供应电力以启动电梯轿厢10的移动。
62.所述第二救援运行r2包括使提升机的电动机12的绕组短路以施加电动机12的动态制动db,其中,如果电梯轿厢负载在电梯轿厢额定负载的第一范围b1内,则选择第一救援运行r1。如果电梯轿厢负载在电梯轿厢额定负载的第二范围b2内,则选择第二救援运行r2。
63.此外,如果电梯轿厢负载在电梯轿厢10额定负载的25%至75%之间,则选择第一救援运行r1。如果电梯轿厢负载在电梯轿厢额定负载的0%-25%或75%-100%内,则选择第二救援运行r2。额定负载理解为电梯轿厢的满载。然而,这些范围仅是示例性的并且可以基于电梯轿厢的平衡比而变化,即配重的尺寸是否为满载加上电梯轿厢的重量的50%,或者例如40%。
64.在第一救援运行r1开始时,从电池20供电以解析提升机12的电动机12a的转子极位置。随后,功率信号被提供给提升机12的电动机12a以在提升机制动器16打开之前产生预转矩。提升机制动器16通过从电池20向制动器一个接一个地供应电力,特别是拾取电力而打开。在打开制动器后,制动器的功率供应被降低到保持制动器打开所需的预定水平。在第一制动器的功率供应已经降低到用于保持第一制动器打开的极限之后,首先将拾取功率供应给第一制动器并因此提供给第二制动器。这样可以减少制动器所需的瞬时净功率。
65.在第一救援r1期间,在打开提升机制动器16之后,电力从电池20提供给制动器和提升机12的电动机12a,以将电梯轿厢10朝向层站l驱动。电梯轿厢的轿厢位置cp从起始位置移动到门区dz,所述门区由字母a、b、c和d表示。
66.当电梯定位系统22指示电梯轿厢位置在门区dz区域的边缘并且电梯轿厢10必须停止以到达目的地楼层高度时,由于当电机转矩开始使电梯轿厢减速时电动机12a不再充当发电机,所以电力从电池20汲取。
67.为避免在减速阶段从电池汲取过多电流,电机转矩参考或电机电流参考被限制为与当测量的电池电流或测量的电池功率超过定义的电池电流极限或电池功率极限时的电机转矩参考或电机电流参考相同的值。电梯轿厢10的轿厢速度cv遵循平滑运行曲线srp。替代地,电梯轿厢可以根据斜坡停止csr或替代地通过机械制动器来控制。
68.此外,示出了关于电梯轿厢10的轿厢位置cp和轿厢速度cv的制动转矩bt和电机转矩mt的混合,其中电机转矩极限mtl是由于电池电流限制。在减速阶段可能会限制电机转矩和电流,以避免超过电池电流极限。
69.图4是根据本发明实施例的在电梯负载转矩为0%时的轿厢位置、轿厢速度、制动转矩和电机转矩的曲线图。
70.由于电池电流限制或电池功率限制,电机转矩在自动救援运行的减速阶段受到限制。当电梯轿厢10不移动时,制动转矩与启动和停止时的电梯负载转矩相等且相反。当电梯轿厢定位系统22指示电梯轿厢10处于门区dz的边缘时,停止程序开始。
71.停止以t1时的平滑运行曲线srp开始,但实际速度遵循曲线csr,因为电机转矩受到限制。在此示例中,当电梯轿厢位置超出区域b和c之间边界处的确切楼层高度时,机械制动器在t2时下降。
72.在第二救援运行r2中,电梯轿厢10的移动通过启动电机动态制动db而开始。所有电机相位使用电机逆变器功率晶体管连接在一起,随后提升机制动器16一个接一个打开。
73.如果电梯定位系统22指示电梯轿厢10的位置在门区dz区域的边缘,则从电池20汲取电力以在提升机12的电动机12a中产生转矩。
74.为了降低提升机制动器16打开后电梯轿厢10的加速度,将提升机12的电动机12a的绕组短路,以对提升机12的电动机12a施加动态制动db。
75.救援驱动装置14通过电机编码器确定电梯轿厢10的速度,并且当电梯轿厢10的速度超过预定阈值时,通过启动对电动机12a的逆变器的功率晶体管的调制来启动再生制动。
76.在电动机12a的再生制动期间,救援驱动装置14操作电梯轿厢10的速度控制回路,使得电梯轿厢10根据预定的速度曲线(即srp或csr)朝向层站l移动。
77.根据实施例,在第二救援运行r2结束时,测量电梯轿厢10到层站l的距离,其中当测量的距离小于预定的制动器下降极限时生成制动器下降命令。