1.本发明专利涉及一种基于视觉的烟叶辅料运送小车,属于轮式移动机器人技术领域。
背景技术:
2.随着科技的不断进步,自动化设备的使用越来越广泛。据统计,在卷烟厂行业中,大量的时间和生产成本用于搬运工作。目前卷烟厂搬运工作主要依靠自主导航小车实现,该类自主导航小车引导方式主要包括标识导航和激光导航。标识导航主要通过识别路面的标识符进行移动,无法适应柔性工业制造现场,而采用激光导航虽然能够适用于柔性工业制造现场,但是存在成本大、干扰强、反应缓慢等问题。
技术实现要素:
3.本发明要解决的技术问题:本发明提供一种基于视觉的烟叶辅料运送小车,通过计算机视觉语义分割的方法实现烟厂智能小车的视觉导航,辅助搬运小车实现自动控制,然后在结构上集成升降台托盘和双机械臂搬运机构,通过模拟人手的双臂进行工作;实现将烟叶辅料从物料仓库运送到机台,成本低廉,结构简单,适应性强。
4.本发明的技术方案是:一种基于视觉的烟叶辅料运送小车,包括车架5、升降台3、托盘2、液压缸组件、车轮7、搬运机构、视觉装置,底盘29上设有电源30、电机驱动装置33、控制器31、视觉开发板32;车架5底部设置底盘29,液压缸组件固定在底盘29上且与升降台3连接,升降台3顶部与托盘2相连,底盘29的下部设有四个车轮7,每个车轮由步进电机11和直流电机8驱动,步进电机11和直流电机8与电源30连接,车架5上部的前端安装有搬运机构,搬运机构上方安装有视觉装置,步进电机11与电机驱动装置33连接,视觉装置中的工业相机16与视觉开发板32连接,液压缸组件、直流电机8、电机驱动装置33、视觉开发板32、搬运机构、视觉装置中的转动装置均与控制器31连接。
5.具体地,所述的升降台3装置采用铰链机构,液压缸组件包括液压缸4、液压泵、液压电机,液压缸与液压泵相连,液压泵与液压电机连接,液压电机与控制器31连接,液压缸4与升降台3相连。
6.具体地,所述搬运机构由安装在车架5上部前端的转动台28和安装在转动台28两侧的机械臂组成,机械臂包括机械大臂17、肘关节轴18、伸缩臂19、腕关节轴20、机械爪ⅰ第二节指关节21、机械爪ⅰ第一节指关节22、连接轴23、指关节连接轴ⅰ24、机械爪ⅱ第一节指关节25、指关节连接轴ⅱ26、机械爪ⅱ第二节指关节27、机械臂电机;机械大臂17分别与机械大臂电机、肘关节轴18连接,肘关节轴18前端安装有伸缩臂电机,伸缩臂19与伸缩臂电机连接,伸缩臂19内部安装有液压系统,腕关节轴20一端与伸缩臂19端部的连接,另一端连接机械爪连接轴23,机械爪连接轴23通过指关节连接轴ⅰ24与机械爪ⅱ第一节指关节25的一端连接,机械爪ⅱ第一节指关节25的另一端通过指关节连接轴ⅱ26与机械爪ⅱ第二节指关
节27连接,机械爪ⅰ第一节指关节22的一端与机械爪连接轴23连接,另一端与机械爪ⅰ第二节指关节21连接,机械爪连接轴23上安装有机械爪电机,指关节连接轴ⅰ24和指关节连接轴ⅱ24上分别安装指关节电机,机械大臂电机、伸缩臂电机、液压系统、机械爪电机、指关节电机均与控制器31连接。
7.具体地,所述的视觉装置还包括舵机ⅰ13、舵机ⅱ15、相机底座12、相机架14和工业相机16,相机底座12固定在搬运机构上部,相机底座12通过上方的舵机ⅰ13与相机架14连接,相机架14上安装有舵机ⅱ15舵机ⅱ15与工业相机托板连接,工业相机16安装在工业相机托板16上,舵机ⅰ13和舵机ⅱ15垂直放置且均与控制器31连接。
8.优选地,所述的液压缸4以双耳环的连接方式与升降台3下部连接,升降台3顶部以槽口的方式与托盘2相连接。
9.具体地,所述的视觉开发板32内载入卷积神经网络训练的网络模型,网络模型内存储识别目标的纹理特征信息的参数。
10.本发明的有益效果是:1、本发明专利结构简单,成本较低,适应性强,搬运稳定,可以适应柔性结构的机械加工场景的工件的搬运工作。
11.2、通过集成可升降台装置和双机械臂机构,可以完成对接不同高度的货架与机台之间烟叶辅料的运送,结构简单、操作灵活、搬运稳定、适应性强。
12.3、使用计算机视觉中语义分割的方法实现搬运小车的视觉导航,通过视觉开发板与控制器进行数据交换,实现搬运小车的环境感知和自动控制,成本低廉,反应速度快,容易实现。
附图说明
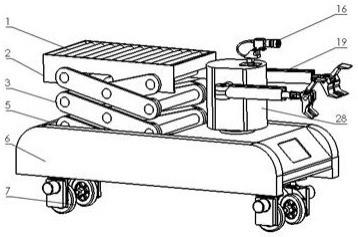
13.图1为本发明专利的总体结构示意图;图2为本发明专利车轮的示意图;图3为本发明专利视觉装置的示意图;图4为本发明专利升降台的结构示意图;图5为本发明专利机械臂机构的结构示意图;图6为本发明专利控制系统的位置示意图。
14.图中各标号:1-滚筒、2-托盘、3-升降台、4-液压缸、5-车架、6-侧板、7-车轮、8-直流电机、9-角件、10-联轴器、11-步进电机、12-相机底座、13-舵机1、14-相机架、15-舵机2、16-工业相机、17-机械大臂、18-肘关节轴、19-伸缩臂、20-腕关节轴、21-机械爪ⅰ第二节指关节、22-机械爪ⅰ第一节指关节、23-机械爪连接轴、24-指关节连接轴ⅰ、25-机械爪ⅱ第一节指关节、26-指关节连接轴ⅱ、27-机械爪ⅱ第二节指关节、28-转动台、29-底盘、30-电源、31-控制器、32-视觉开发板、33-电机驱动装置。
具体实施方式
15.下面结合附图和具体实施例,对本发明作进一步说明。
16.实施例1:如图1-6所示,一种基于视觉的烟叶辅料运送小车,包括车架5、升降台3、托盘2、液压缸组件、车轮7、搬运机构、视觉装置,底盘29上设有电源30、电机驱动装置33、控
制器31、视觉开发板32;车架5底部设置底盘29,液压缸组件固定在底盘29上且与升降台3连接,升降台3顶部与托盘2相连,底盘29的下部设有四个车轮7,每个车轮由步进电机11和直流电机8驱动,步进电机11和直流电机8与电源30连接,车架5上部的前端安装有搬运机构,搬运机构上方安装有视觉装置,步进电机11与电机驱动装置33连接,视觉装置中的工业相机16与视觉开发板32连接,液压缸组件、直流电机8、电机驱动装置33、视觉开发板32、搬运机构、视觉装置中的转动装置均与控制器31连接。
17.进一步地,所述的升降台3采用铰链机构,液压缸组件包括液压缸4、液压泵、液压电机,液压缸与液压泵相连,液压泵与液压电机连接,液压电机与控制器31连接,液压缸4与升降台3相连。
18.进一步地,所述搬运机构由安装在车架5上部前端的转动台28和安装在转动台28两侧的机械臂组成,机械臂包括机械大臂17、肘关节轴18、伸缩臂19、腕关节轴20、机械爪ⅰ第二节指关节21、机械爪ⅰ第一节指关节22、连接轴23、指关节连接轴ⅰ24、机械爪ⅱ第一节指关节25、指关节连接轴ⅱ26、机械爪ⅱ第二节指关节27、机械臂电机;机械大臂17分别与机械大臂电机、肘关节轴18连接,肘关节轴18前端安装有伸缩臂电机,伸缩臂19与伸缩臂电机连接,伸缩臂19内部安装有液压系统,腕关节轴20一端与伸缩臂19端部的连接,另一端连接机械爪连接轴23,机械爪连接轴23通过指关节连接轴ⅰ24与机械爪ⅱ第一节指关节25的一端连接,机械爪ⅱ第一节指关节25的另一端通过指关节连接轴ⅱ26与机械爪ⅱ第二节指关节27连接,机械爪ⅰ第一节指关节22的一端与机械爪连接轴23连接,另一端与机械爪ⅰ第二节指关节21连接,机械爪连接轴23上安装有机械爪电机,指关节连接轴ⅰ24和指关节连接轴ⅱ24上分别安装指关节电机。
19.整个机械臂由控制器31对机械大臂电机、伸缩臂电机、液压系统、机械爪电机、关节电机进行控制,实现抓取功能。搬运机构由两个机械臂组成,搬运过程中双臂配合操作,相比一般的搬运机构,双臂搬运机构搬运更加灵活,搬运更加平稳。
20.进一步地,所述的视觉装置除工业相机外还包括舵机ⅰ13、舵机ⅱ15、相机底座12、相机架14,相机底座12固定在搬运机构上部,相机底座12通过上方的舵机ⅰ13与相机架14连接,相机架14上安装有舵机ⅱ15舵机ⅱ15与工业相机托板连接,工业相机16安装在工业相机托板16上,舵机ⅰ13和舵机ⅱ15垂直放置且均与控制器31连接,实现工业相机的全方位转动。
21.进一步地,所述的液压缸4以双耳环的连接方式与升降台3下部连接,升降台3顶部以槽口的方式与托盘2相连接。
22.进一步地,所述的视觉开发板32内载入卷积神经网络训练的网络模型,网络模型内存储识别目标的纹理特征信息的参数。
23.控制器31通过串行协议与视觉开发板32进行数据交换,将视觉开发板32中的视觉信息传输到控制器31,通过控制器31产生的脉冲信号控制直流电机8的转速,从而实现车轮7前进的快慢,通过电机驱动装置33将控制器31的脉冲信号转换为角位移来控制步进电机11转动的角度,从而控制车轮7的转动的角度和方向。液压电机与液压泵连接,由控制器31进行控制,视觉开发板32将视觉信息传递给控制器31,通过控制器31控制液压电机带动液压泵对液压缸4控制,从而实现托盘2上升和下降,以适应不同高度的货架和机台。
24.本发明的工作原理是:首先,采集卷烟厂的数据集并对数据集中需要识识别的目标进行标注,接着在卷积神经网络训练出相应的网络模型,并将训练的网络模型载入视觉开发板32;然后,工业相机16通过现场实时采集卷烟厂的图像数据并传输给视觉开发板32,视觉开发板32通过训练好的网络模型对现场采集的图像中的目标进行识别并进行像素级别的分割,实现对卷烟厂场景的识别与理解;最后,视觉开发板32将卷烟厂场景的视觉信息传输到控制器31,通过控制器31发出脉冲信号控制直流电机8和步进电机11,实现小车的自动避障、调节升降台3的高度和烟叶辅料的搬运,实现烟厂物料仓库到机台之间的搬运工作。
25.本发明专利涉及一种基于视觉的烟叶辅料运送小车,通过计算机视觉中语义分割的方法实现烟厂智能小车的视觉导航;在结构上也集成升降式托盘2和双机械臂机构,实现自动导航小车的中长距离运送。该小车主要承担烟厂物料仓库到机台之间的辅料运送。本发明专利成本低廉、适应性强,结构简单,能够适应烟厂柔性工业制造现场。
26.上面结合附图介绍对本发明的具体实例做了详细的阐述,但是本发明专利并不仅局限于上述实例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。