1.本发明涉及无链条的电动自行车,尤其是,涉及电动自行车的速度控制。
背景技术:
2.近来,由于对近距离移动工具的需求增加和环境法规等,对电动自行车的需求和关注正在增加。在欧洲,随着e-cargo类别的生成,不仅产生了两轮的,还有各种三至四轮的小型移动工具。在欧洲,如果是满足电动自行车标准e-pac(electrically power assisted cycles)标准的产品,则可以使用现有的自行车基础设施,而且在某些地区还可以享受补贴等的福利。
3.e-pac标准是通过向踏板施加力来拉动电动自行车的驱动系统的标准,在该驱动系统包括踏板。因此,电动自行车的驱动系统必须满足e-pac标准。电动自行车的驱动系统大部分是通过链条连接踏板和驱动车轮的结构。两轮电动自行车与以往的自行车相同,具有通过链条连接车轮和踏板的相同结构,但是如果在由三至四轮构成的e-cargo等中在驱动系统使用这种链条,则存在增加链条和齿车轮等的同时驱动系统结构复杂的问题。
4.本发明的发明人为了解决这种现有技术的电动自行车中用链条连接的驱动系统的问题一直在努力研究。为了完成取消电动自行车的链条将踏板的驱动力转换为电力进而没有链条也可传递至车轮的电动自行车用驱动系统,经过大量的努力完成了本发明。
技术实现要素:
5.技术问题
6.本发明的目的在于提供除了两轮以外也可适用于三至四轮的e-cargo的结构简单的驱动系统。另外,本发明的另一目的在于还提供电动自行车的速度控制方法,具有这种驱动系统的同时提供与以往的具有链条的电动自行车相同的行驶感,并且能够满足电动自行车法规等。
7.另一方面,对于本发明的未明示的其他目的,可在从以下的详细说明及其效果容易推测的范围内追加考虑。
8.解决问题的手段
9.本发明的电动自行车速度控制装置包括:速度传感器部,用于测量车轮的旋转速度及通过踏板驱动的发电机的旋转速度;电流传感器部,用于测量驱动所述车轮的马达及所述发电机的驱动电流;车轮速度控制部,通过车轮速度指令值和车轮速度值生成车轮转矩指令值,所述车轮速度指令值为在通过所述速度传感器部测量的踏板的旋转速度乘以齿轮比而得出,所述车轮速值通过所述速度传感器部测量;车轮转矩控制部,通过所述车轮转矩指令值和通过所述电流传感器部测量的所述马达的驱动电流值生成用于驱动所述马达的马达驱动控制电流;及踏板转矩控制部,通过在所述车轮转矩指令值适用辅助等级的值和通过所述电流传感器部测量的所述发电机驱动电流测量值生成用于控制所述发电机的转矩的发电机转矩控制电流。
10.所述车轮速度控制部控制所述车轮转矩指令值,以使所述车轮速度值跟随所述车轮速度指令值。
11.所述车轮速度控制部通过比例-积分-微分(pid:proportional-integral-differential)控制方法生成所述车轮转矩指令值。
12.所述车轮速度控制部将在从所述车轮速度指令值减去车轮速度的值乘以比例系数的值、将所述车轮速度指令值减去车轮速度的值积分的值、将所述车轮速度指令值减去车轮速度的值微分之后乘以车轮惯性值相加,进而生成车轮转矩指令值。
13.所述车轮转矩控制部包括车轮转矩计算部及车轮电流控制部;所述车轮转矩计算部用所述车轮转矩指令计算用于驱动所述马达的马达电流指令;所述车轮电流控制部通过所述马达电流指令和所述测量的马达驱动电流值控制用于驱动马达的电流。
14.所述车轮转矩控制部控制马达驱动电流,以使所述马达驱动电流值跟随所述马达电流指令。
15.所述踏板转矩控制部包括踏板转矩计算部及踏板电流控制部;所述踏板转矩计算部通过在所述车轮转矩指令值适用辅助等级的值计算发电机电流指令;所述踏板电流控制部通过所述发电机电流指令和所述测量的发电机的电流值生成所述发电机转矩控制电流。
16.所述踏板转矩控制部控制所述发电机转矩控制电流,以使所述发电机电流值跟随所述发电机电流指令。
17.本发明的另一实施例的电动自行车速度控制方法,包括如下的步骤:接收踏板的旋转速度和车轮速度的输入;通过在所述踏板的旋转速度乘以齿轮比的车轮速度指令值和所述测量的车轮速度值生成车轮转矩指令值;测量驱动车轮的马达的驱动电流和通过踏板驱动的发电机的驱动电流;通过所述车轮转矩指令值和所述测量的马达的驱动电流值生成用于驱动所述马达的马达驱动控制电流;通过在所述车轮转矩指令值适用辅助等级的值和所述测量的发电机的驱动电流值生成用于控制所述发电机的转矩的发电机转矩控制电流。
18.生成所述车轮转矩指令值的步骤为,控制所述车轮转矩指令值,以使所述测量的车轮速度指令值跟随所述车轮速度指令值。
19.发明的效果
20.根据本发明,适用没有链条的驱动系统,进而具有可将驱动系统的结构简单化的效果。由于采用没有链条的驱动系统,因此具有也可将驱动系统扩张到除了两轮以外的具有三至四轮的各种小型运输工具的优点。
21.另一方面,要补充的是,即使是在此未明示的效果,通过本发明的技术特征期待的以下说明中记载的效果及其潜在效果也被当做与在本发明的说明书记载的相同。
附图说明
22.图1示出了本发明的优选的某一实施例的电动自行车速度控制装置的概略性结构图。
23.图2示出了在本发明的优选的某一实施例的电动自行车速度控制装置中的车轮速度控制部分的概略性结构图。
24.图3是本发明的优选的某一实施例的电动自行车速度控制装置的更加详细的结构图。
25.图4示出了根据本发明的优选的某一实施例的电动自行车速度控制装置的踏板动力和齿轮比的关系。
26.图5是本发明的优选的另一实施例的电动自行车速度控制装置的结构图。
27.图6示出了本发明的优选的另一实施例的电动自行车速度控制装置的效果。
28.图7是本发明的优选的其他一实施例的电动自行车速度控制方法的概略性流程图。
29.附图是为了理解本发明的技术思想而作为参照示例的,不得由此限制本发明的权利范围。
具体实施方式
30.以下,参照附图说明由本发明的各种实施例导出的本发明的结构和源于该结构的效果。在对本发明的说明中,相关的公知功能作为对于该领域的技术人员显而易见的项,若判断不必要地使本发明的要点不清楚,则省略其详细说明。
[0031]“第一”、“第二”等的用语可使用于说明各种构成元素,但是所述构成元素不限于所述的用语。所述的用语只以从一构成元素区分另一构成元素的目的来使用。例如,在不超出本发明的权利范围的同时“第一构成元素”可命名为“第二构成元素”,类似的“第二构成元素”也可命名为“第以构成元素”。另外,对于单数的表述,除非在文章中有明确不同的表述,否则包括复数的表述。对于在本发明的实施例中使用的用语,除非有不同的定义,否则可解释为在该技术领域中具有常规知识的人通常已知的含义。
[0032]
以下,参照附图说明由本发明的各种实施例导出的本发明的结构和源于其结构的效果。
[0033]
图1示出了本发明的优选的某一实施例的电动自行车速度控制装置的概略性结构图。
[0034]
电动自行车速度控制装置1为了控制电动自行车的速度利用踏板32和驱动车轮22的位置关系和速度。
[0035]
通常的使用链条的自行车是通过链条机械性连接踏板和车轮,因此根据踏板旋转的程度车轮也随之进行旋转。
[0036]
然而,没有链条的电动自行车没有机械性连接,因此为了根据踏板旋转程度车轮也随之旋转,应利用两者之间的位置关系。
[0037]
位置控制器2通过利用发电机位置传感器7测量的踏板32的位置θp和利用马达位置传感器4测量的车轮22的位置θw生成车轮22的速度指令nw*。为使θp-θw=0,即踏板32的位置和车轮22的位置的差为0,控制车轮22速度,使踏板32的位置和车轮22的位置一致。
[0038]
车轮速度控制器3通过车轮的速度指令和利用马达速度传感器5测量的实际车轮22的速度nw、利用发电机速度传感器8测量的踏板32的速度np生成用于控制车轮22速度的转矩指令tw*。另外,为了生成与有链条的自行车相同的踏板32感也生成踏板32的转矩指令tp*,但是在踏板32的转矩指令适用辅助等级(assist level)。另外,通过利用倾斜度传感器10测量的倾斜度可调节车轮22的速度和踏板32感。
[0039]
图2示出了在本发明的优选的某一实施例的电动自行车速度控制装置中的车轮速度控制装置的概略性结构图。
[0040]
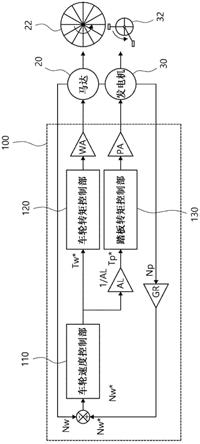
用于控制车轮速度的本发明的电动自行车速度控制装置100包括车轮速度控制部110、车轮转矩控制部120及踏板转矩控制部130。
[0041]
车轮速度控制部110通过车轮速度nw和车轮速度指令nw*生成车轮转矩指令tw*和踏板转矩指令tp*。若使用人员踩踏踏板32旋转与踏板32连接的发电机30,则控制踏板旋转速度np,以跟随车轮速度nw。
[0042]
车轮速度指令nw*是通过在踏板速度np乘以齿轮比(gr:gear ratio)的值生成。有链条的自行车是通过链条连接踏板和车轮,踏板和车轮之间的旋转比由齿轮比决定,因此为了对于没有链条的电动自行车也传递相同的踏板感适用齿轮比gr。
[0043]
若车轮速度指令nw*大于实际测量的车轮速度nw,则车轮速度控制部110为了增加车轮速度nw而增加车轮转矩指令tw*;若车轮速度指令nw*小于车轮速度nw,则车轮速度控制部110为了降低车轮速度nw而降低车轮转矩指令tw*。
[0044]
车轮转矩控制部120为接收车轮转矩指令tw*生成用于驱动马达20的电流来传递于车轮致动器(wa:wheel actuator),进而控制车轮速度。
[0045]
踏板转矩控制部130为接收踏板转矩指令tp*生成用于调节踏板32负载的电流来传递于踏板致动器(pa:pedal actuator),进而调节发电机30的负载。踏板转矩指令tp*是在车轮速度指令tw*适用辅助等级al而定,辅助等级al越大则踏板越轻,因此适用公式tp*=tw*/al。
[0046]
图3是本发明的各个控制部的更加详细的结构图。
[0047]
车轮速度控制部110可使用比例-积分-微分(pid:proportional-integral-differential)控制器,以生成车轮转矩指令tw*。
[0048]
车轮速度控制部110接收在发电机30测量的踏板速度np适用齿轮比gr的值,即车轮速度指令nw*和在马达20测量的车轮速度nw的输入。
[0049]
在车轮速度指令nw*和车轮速度nw的差(nw*-nw)适用比例-积分(pi)控制,可如下公式生成转矩t*:
[0050][0051]
kp为比例增益(gain)值,ki为积分增益值。
[0052]
在计算出的转矩t*反映车轮加速度的前馈补偿转矩ta,进而生成车轮转矩指令tw*。
[0053]
前馈补偿转矩ta通过如下的公式生成:
[0054][0055]
通过在将车轮速度指令nw*和车轮速度nw的差(nw*-nw)微分的值乘以车轮惯性j和增益(gain)值获取前馈补偿转矩ta。
[0056]
车轮转矩指令tw*为通过将转矩t*和前馈补偿转矩ta相加,tw*=t*+ta生成。
[0057]
车轮转矩控制部120和踏板转矩控制部130通过车轮转矩指令tw*和踏板转矩指令tp*驱动马达20,并生成用于设定发电机30的负载的电流。
[0058]
车轮转矩控制部120通过转矩计算器122(tc:torque calculator)将车轮转矩指令tw*转换为马达电流指令im*。电流控制部124通过马达电流指令im*和实际测量的马达电
流im的差控制驱动车轮致动器126(wa)的电流。通过车轮致动器126驱动马达20并车轮22进行旋转,进而实现电动自行车的移动。
[0059]
踏板转矩控制部130通过转矩计算器122将在车轮转矩指令tw*适用辅助等级al的值,即踏板转矩指令tp*转换为发电机电流指令ig*。电流控制部134通过发电机电流指令ig*和实际测量的发电机电流ig的差控制用于调节施加于发电机30的负载的踏板致动器136(pa)。踏板致动器136为在踏板32生成负载,进而生成使用人员踩踏踏板的踏板感。
[0060]
如上所述,分离车轮转矩控制部120和踏板转矩控制部130,因此即使踏板转矩控制部130或者踏板致动器136发生故障,电动自行车也可正常行驶。这是因为若踏板致动器136不执行动作,则不会生成施加于踏板32的负载,因此使用人员无法感觉到踏板感,但是通过踏板32的旋转发电机30进行旋转,发电机的旋转速度,即踏板速度np传递于车轮速度控制部110的同时生成用于控制车轮速度的车轮转矩指令tw*,因此车轮转矩控制部120可生成用于驱动马达20的电流。
[0061]
车轮速度指令nw*和车轮速度nw用于计算车轮22的动力和踏板32的动力。
[0062]
车轮角速度ww通过计算,踏板角速度wp通过计算。
[0063]
从而,旋转动力是转矩和角速度的相乘,因此车轮动力pw为踏板动力pp为
[0064]
若计算出的车轮动力pw大于0,则车轮被驱动;若踏板动力pp小于0,则通过反作用力产生踏板感。
[0065]
图4示出了根据本发明的电动自行车速度控制装置的踏板动力和齿轮比的关系。
[0066]
x轴表示齿轮比(gear ratio),y轴表示辅助等级(assist level)。
[0067]
成立关系如下:齿轮比向x轴的右侧越来越高,同时踏板踩踏速度变慢,从而发电量减少的同时电池消耗增加。相反地,齿轮比向左侧越来越低,踏板踩踏变得轻松,因此发电量增加。
[0068]
若辅助等级向y轴的向下方向越来越高,则踏板踩踏变得轻松,但是用于辅助的电池消耗增加。相反地,辅助等级向上侧方向越来越低的同时踏板踩踏变得更加困难,而发电量反而增加。
[0069]
在通常的链条自行车的齿轮比和踏板转矩的关系4中,齿轮比越大则施加于踏板的力应该变大,从而踏板的转数(cadence)降低。取而代之,给车轮传递更大的动力。
[0070]
相反地,若齿轮比小,则施加于踏板的力变小,而踏板的转数变高。由于施加于踏板的负载小,因此可快速旋转踏板。但是,对车轮传递的动力小。
[0071]
由于通过链条连接踏板和车轮,因此施加于踏板的力小的同时车轮的速度变快或者即使在踏板施加大力车轮的速度变慢是不可能的。即,是不能超出已设定的区域4的齿轮比和踏板转矩的关系。
[0072]
相反,根据用于控制没有链条的电动自行车的速度的本发明,相比于有链条的自行车可设定更大的区域5。
[0073]
辅助等级是指辅助踏板动力的动力大小。若辅助等级大,则相比于使用人员踩踏
踏板的力,更大的动力传递于车轮;与此相反地,若辅助等级小,则仅是相当于使用人员踩踏踏板的力程度的动力传递于车轮。
[0074]
若齿轮比低,且辅助等级低,则可以给车轮传递较小的动力,因此踏板可快速旋转,该旋转力可用于发电机充电。即,可设定功率模式(power mode)。若齿轮比低,但是辅助等级高,则传递于车轮的动力变高,因此可提高速度。在图4中用power mode表示的区域就是如此。
[0075]
若齿轮比变高,则施加于踏板的力应该更大。但是,若辅助等级高,则齿轮比变大的同时也可在踏板施加小力(low power mode)。同时,传递于车轮的力可设定为与在踏板施加大力时相同。在图4中,用low power mode设定的区域就是如此。
[0076]
如此,本发明具有不仅是通过齿轮比和辅助等级的组合形成与通常的链条自行车类似的踏板感的区域4,还可实现在通常的链条自行车中无法实现的其他功率模式的优点。
[0077]
图5是本发明的优选的另一实施例的电动自行车速度控制装置的结构图。
[0078]
电动自行车速度控制装置200为与车轮速度控制部210、车轮转矩控制部220、踏板转矩控制部230一同还可包括踏板感控制部240。
[0079]
踏板感控制部240为还考虑倾斜度g生成踏板转矩指令tp*。
[0080]
例如,诸如在停止状态下出发或者在倾斜的地方行驶的情况下,需要用于追加调节踏板感的控制。
[0081]
在倾斜度g为0的平地,如上所述通过车轮速度指令nw*和车轮速度nw的差生成车轮转矩指令tw*和踏板转矩指令tp*。
[0082]
在倾斜度g在0以上的情况下,即爬坡状况的情况下,需要追加控制踏板转矩指令tp*。在坡地中可出现车轮速度nw小于或者等于0的状况。在该情况下,不生成踏板转矩指令tp*,因此使用人员能够感到踏板空转一样的感觉。据此,在倾斜度g大于0并且车轮速度nw小于或者等于0的情况下,生成预定大小的踏板转矩指令tp*。通过如此生成的踏板转矩,使用人员可保持平衡。
[0083]
但是,电动自行车出发,车轮速度nw大于0的情况下,与平地的情况相同,通过车轮速度指令nw*和车轮速度nw的差生成踏板转矩指令tp*。
[0084]
图6示出了在如上述考虑倾斜度的情况下的车轮速度和踏板转矩的关系。
[0085]
图6的(a)部分示出了根据坡地中的车轮速度的踏板转矩大小。
[0086]
在倾斜度g大于0的情况下,在停止状态下将踏板转矩tp保持预定大小直至车轮速度nw达到预定速度,以使使用人员把握好中心。若车轮速度nw超出预定速度,则减少踏板转矩tp保持踏板感。
[0087]
图6的(b)部分示出了倾斜度和传递于踏板的力之间的关系。
[0088]
通常的链条自行车为倾斜度g越大则施加于踏板的力就应该越大。这是坡地的倾斜越陡就越累。
[0089]
但是,本发明的电动自行车的情况下,调节辅助等级,进而始终可用相同的力驱动踏板。这是不论在平地(g=0)还是在坡地(g》0)都可用相同的力驱动踏板。从而,即使是腿力弱的使用人员,诸如老年人也能够便利地利用自行车。
[0090]
图7是本发明的优选的其他一实施例的电动自行车速度控制方法的概略性流程图。
[0091]
电动自行车速度控制方法可通过包括一个以上的处理器和存储器的控制部执行。
[0092]
控制部从车轮速度传感器及踏板速度传感器接收车轮速度和踏板速度的输入(s10)。
[0093]
在接收输入的踏板速度乘以齿轮比,进而计算车轮速度指令,通过车轮速度指令和实际测量的车轮速度的差计算车轮转矩指令值(s20)。这是为了根据踏板速度调节车轮速度。即,为使车轮速度跟随踏板速度而计算车轮转矩指令值。
[0094]
为了通过车轮转矩指令值生成马达驱动电流和踏板转矩电流,从传感器接收测量马达驱动电流及发电机驱动电流的值的输入(s30)。
[0095]
通过车轮转矩指令值计算用于驱动马达的马达驱动电流指令值,在此通过与实际测量的马达驱动电流的差控制马达转矩电流(s40)。这是使实际测量的马达驱动电流跟随马达驱动电流指令值地进行控制。
[0096]
将在车轮转矩指令值适用辅助等级al的值计算为发电机转矩控制电流指令值,并控制发电机转矩控制电流,使实际测量的发电机驱动电流值跟随发电机转矩控制电流指令值(s50)。
[0097]
根据这种电动自行车速度控制装置及方法,根据踏板速度使车轮速度跟随踏板速度地进行控制,并控制踏板感,进而可感觉到与有链条的自行车相同的踏板感,同时根据每位使用人员不同地调节施加于踏板的力,进而具有男女老少都能便利地使用电动自行车的优点。
[0098]
本发明的保护范围不限于在以上明确说明的实施例的记载和表述。另外,再一次补充不得由在本发明所属技术领域中显而易见的变更或者替换显示本发明的保护范围。