1.本发明涉及轨道交通车辆领域的主动安全控制方法,特别是一种车钩摆角主动控制系统及控制方法。
背景技术:
2.轨道交通车辆沿着专门为它铺设的轨道运行,这种特殊的运行特点决定了轨道交通可以编组、连挂组成列车。为了适应成列运行的特点,车与车之间需要连接缓冲装置,即车端连接装置。作为车端连接装置的一部分,车钩的作用是用来实现机车和车辆或者车辆与车辆之间的连挂和传递牵引力及冲击力,并使机车车辆之间互相保持一定的距离。
3.目前,重载铁路运输在世界范围内迅速发展。为了满足煤炭外运地区的运输需求,我国已相继建成大秦、朔黄、瓦日和浩吉等重载运输铁路线,同时依靠大功率、大轴重多机牵引技术和大轴重货车技术,在重载运输铁路线上实现了牵引质量2万吨的目标。伴随着机车、货车轴重的增加,长/大编组列车的纵向冲动问题也会变得更为突出。在纵向冲动作用下,车钩传递的作用力相比于正常时将急剧增大,如果此时恰好车钩偏转角也比较大,则会产生一个很大的横向分力作用在车体上,从而导致轮轨横向力急剧上升,极大地增加了列车脱轨的风险。
4.现有研究中相关文献表明,重载铁路轴重和编组车辆数目的增加将导致列车脱轨事故频次相继增大,经过调查后发现不少事故与车钩行为有关,即车钩偏转摆角过大。因此,需要研发能在适当时刻及时控制车钩偏转角的控制系统,从而避免因车钩横向分力过大所导致的脱轨事故,确保铁路运输的正常运行。
技术实现要素:
5.本发明所要解决的技术问题是,针对现有技术的不足,提供一种车钩摆角主动控制系统及控制方法,该车钩摆角主动控制系统及控制方法解决了在较大纵向压钩力作用下车钩出现“之”字形时产生较大横向分力引起脱轨的问题,从而保证列车的安全运行,提高运输效率和使用可靠性。
6.为解决上述技术问题,本发明所采用的技术方案是:
7.一种车钩摆角主动控制系统,包括设在车体端部的车钩、车载计算机、定位系统、车钩偏转角测量系统、车钩力测量系统,所述定位系统、车载计算机均设在车体上,所述车钩偏转角测量系统、车钩力测量系统均设在车钩的钩头上,所述车钩偏转角测量系统、车钩力测量系统、定位系统均与所述车载计算机相连接,其结构特点是,还包括水平作动器、控制器、作动器偏转角测量系统;
8.所述水平作动器有2个,2个水平作动器对称分布在所述车钩的左、右两侧,水平作动器的一端连接所述车钩,另一端固定在车体端部;
9.所述作动器偏转角测量系统有2个,分别安装在2个所述水平作动器上;
10.所述作动器偏转角测量系统与所述车载计算机相连接,所述车载计算机与设在车
体上的所述控制器相连接,所述控制器与所述水平作动器相连接。
11.本发明的车钩摆角主动控制系统通过在车钩两侧设置水平作动器,再通过各测量系统实时测量车钩力、车钩偏转角、水平作动器偏转角等数据,并将数据传输给车载计算机,同时定位系统将检测到的列车和/或车钩的位置坐标信息传输给车载计算机,车载计算机从预存的线路信息中查询得到该位置坐标信息对应的路线区段的准静态车钩偏转角;最后,车载计算机将车钩偏转角、车钩力的数值传输给控制器,控制器判断是否触发水平作动器动作,同时车载计算机根据以上数据计算得到车钩摆角主动控制系统需要输出的抗偏转力矩和2个水平作动器所需要提供的输出作用力,使车钩偏转角始终保持在准静态偏转角附近(不超过准静态偏转角的正负10%)。由此,实现了对车钩力和车钩动态偏转行为的实时监测和调整,满足车钩偏转角限值的要求,从而提高了列车的运输安全性和效率。
12.进一步的,所述车钩偏转角测量系统、作动器偏转角测量系统均至少包括位移传感器、处理器、存储器。
13.进一步的,所述车钩力测量系统至少包括测力应变片、处理器、存储器。
14.进一步的,所述水平作动器为电磁作动器、液压作动器或气压作动器。
15.基于同一种发明构思,本发明还提出一种车钩摆角主动控制方法。
16.一种车钩摆角主动控制方法,包括如前所述的车钩摆角主动控制系统,其特点是,还包括如下步骤:
17.所述车载计算机中预存有列车的线路信息,所述控制器预先设置好各线路区段的车钩偏转角限值α;
18.所述定位系统实时测量出列车和/或车钩的位置坐标信息并传输给车载计算机,车载计算机根据位置坐标信息,从预存的线路信息中查询得到该位置坐标信息对应的路线区段的准静态车钩偏转角β;
19.所述车钩偏转角测量系统测量出所述车钩相对于垂直方向的相对偏转角θ、所述车钩力测量系统测量出车钩力f
cg
、并分别将测得的θ、f
cg
传输给车载计算机;
20.所述车载计算机将实测的偏转角θ、车钩力fcg分别传输给控制器,控制器判断是否达到触发条件,若达到触发条件,则控制所述水平作动器伸长或缩短。
21.进一步的,控制器控制所述水平作动器伸长或缩短,直到实测的车钩偏转角θ与准静态偏转角β满足以下条件:90%
·
β≤θ≤110%
·
β。
22.根据本发明的实施例,还可以对本发明作进一步的优化,以下为优化后形成的技术方案:
23.所述作动器偏转角测量系统测量出2个所述水平作动器相对于垂直方向的相对偏转角θ1、θ2,所述车载计算机根据实测的偏转角θ、θ1、θ2和准静态车钩偏转角β、车钩力f
cg
,计算所述车钩摆角主动控制系统需要输出的抗偏转力矩m和2个水平作动器所需要提供的输出作用力f1’
、f2’
,即m、f1’
、f2’
需要满足以下条件:
24.m=fcg
·
(sinθ-sinβ)
·
l125.f1’
sinθ1=f2’
sinθ226.(f1’
cosθ1+f2’
cosθ2)
·
b=m
27.其中,l1是指车钩的偏转铰接连接点距车体中心线的纵向距离,b是指水平作动器距车体中心线的横向距离;
28.所述车载计算机将水平作动器所需的输出作用力f1’
、f2’
传输给控制器,所述控制器根据f1’
、f2’
的大小来控制水平作动器伸长或缩短。
29.进一步的,所述触发条件为:车钩偏转角θ、车钩力f
cg
须同时满足:θ>α,f
cg
<0。当实测的车钩偏转角θ大于车钩偏转角限值α,且车钩力f
cg
为压钩力时,控制器将触发水平作动器作出伸长或缩短动作。
30.进一步的,所述线路信息包括各线路区段的位置坐标信息、各线路区段的准静态车钩偏转角。
31.进一步的,所述车钩偏转角限值α小于在最大牵引/制动力作用下列车以最高速度运行时能够承受的最大车钩偏转角。控制器需预设置好不同的线路区段的车钩偏转角限值,所述车钩偏转角限值需要通过前期的数值计算得到,在确保车辆脱轨系数不超标的前提下,计算得到最大牵引/制动力作用下、且列车在不同线路上以最高通过速度运行时能够承受的最大车钩偏转角。在确保列车运行安全的条件下,选取略小于最大值的限值来提高车钩的抗偏转性能。
32.由此,
33.与现有技术相比,本发明所具有的有益效果是:
34.1)本发明的车钩摆角主动控制系统及控制方法通过采用车钩偏转角测量系统和车钩力测量系统,可实时监测车钩力和车钩动态偏转行为,确保所计算的车钩抗偏转力矩结果的准确性和及时性,进而保证作动器反应的精确性。
35.2)本发明的车钩摆角主动控制系统及控制方法采用定位系统实时获取列车的线路位置,利用车载计算机预存的线路信息,准确及时获得列车所在位置处的预设置的车钩偏转角度限值。
36.3)本发明的车钩摆角主动控制系统及控制方法解决了列车在较大纵向压钩力作用下车钩出现“之”字形时产生较大横向分力引起脱轨的问题,通过采取本车钩摆角主动控制系统,水平作动器可以在各种线路上迅速准确做出反应,满足车钩偏转摆角限值的要求,从而提高了列车的运输安全性和效率。
附图说明
37.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单介绍,显而易见地,下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
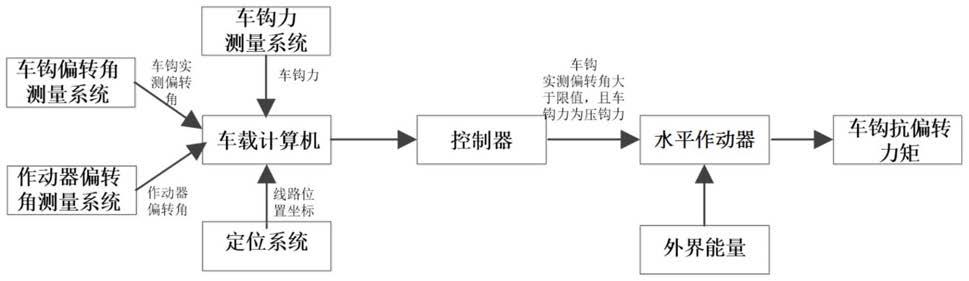
38.图1为本发明的车钩摆角主动控制系统一实施例的逻辑示意图。
39.图2为本发明的车钩摆角主动控制系统一实施例的俯视图。
40.图3为本发明的车钩摆角主动控制系统一实施例的作动器工作示意图。
41.图4为本发明的车钩摆角主动控制系统一实施例的车体及车钩的受力示意图
42.附图标记:
43.1-车钩;2-水平作动器;3-控制器;4-车载计算机;5-定位系统;6-车钩偏转角测量系统;7-车钩力测量系统;8-作动器偏转角测量系统;9-车体。
具体实施方式
44.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合实施例的附图,
对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
45.本发明至少一个实施例提供一种车钩摆角主动控制系统,如图1所示,包括设在车体端部的车钩1,还包括水平作动器2、控制器3、车载计算机4、定位系统5、车钩偏转角测量系统6、车钩力测量系统7、作动器偏转角测量系统8;所述水平作动器2有2个,2个水平作动器2对称分布在所述车钩1的左、右两侧,水平作动器2的一端连接所述车钩1,另一端固定在车体端部;所述水平作动器2为电磁作动器、液压作动器或气压作动器,并外接动力源(外界能量)。
46.所述作动器偏转角测量系统8有2个,分别安装在2个所述水平作动器2上;所述车钩偏转角测量系统6、车钩力测量系统7均设在车钩1的钩头上;所述车钩偏转角测量系统6、作动器偏转角测量系统8均至少包括位移传感器、处理器、存储器。所述车钩力测量系统7至少包括测力应变片、处理器、存储器。所述定位系统5、车载计算机4、控制器3均设在车体上;所述车钩偏转角测量系统6、车钩力测量系统7、作动器偏转角测量系统8、定位系统5均与所述车载计算机4相连接,所述车载计算机4与所述控制器3相连接,所述控制器3与所述水平作动器2相连接。
47.各测量系统实时测量车钩力、车钩偏转角、2个水平作动器的偏转角等数据,并将数据传输给车载计算机4,同时定位系统5将检测到的列车和/或车钩的位置坐标信息传输给车载计算机4,车载计算机4从预存的线路信息中查询得到该位置坐标信息对应的路线区段的准静态车钩偏转角;最后,车载计算机4将车钩偏转角、车钩力的数值传输给控制器3,控制器3判断是否触发水平作动器2动作,同时车载计算机4根据以上数据计算得到车钩摆角主动控制系统需要输出的抗偏转力矩和2个水平作动器所需要提供的输出作用力,使车钩偏转角始终保持在准静态偏转角附近(不超过准静态偏转角的
±
10%)。
48.结合图2,水平作动器2、车钩1与车钩偏转角测量系统6、车钩力测量系统7、作动器偏转角测量系统8共同构成1套抗偏转力矩装置,在车体的前端、后端各设有1套抗偏转力矩装置,2套抗偏转力矩装置既可通过1套设在车体上的控制器、车载计算机、定位系统相配合来实现控制(图2所示),也可通过2套控制器、车载计算机、定位系统来分别配合,车体的前端和后端实现分开控制(图中未示出)。
49.基于同一种发明构思,本发明还提出一种车钩摆角主动控制方法。一种车钩摆角主动控制方法,包括如前所述的车钩摆角主动控制系统,其特点是还包括如下步骤:
50.所述车载计算机4中预存有列车的线路信息,所述控制器3预先设置好各线路区段的车钩偏转角限值α;所述线路信息包括各线路区段的位置坐标信息、各线路区段的准静态车钩偏转角,所述车钩偏转角限值α小于在最大牵引/制动力作用下列车以最高速度运行时能够承受的最大车钩偏转角。
51.所述定位系统5实时测量出列车和/或车钩1的位置坐标信息并传输给车载计算机
4,车载计算机4根据位置坐标信息,从预存的线路信息中查询得到该位置坐标信息对应的路线区段的准静态车钩偏转角β;所述车钩偏转角测量系统6测量出所述车钩1相对于垂直方向的相对偏转角θ、所述车钩力测量系统7测量出车钩力f
cg
、并分别将测得的θ、f
cg
传输给车载计算机4。
52.所述车载计算机4将实测的偏转角θ、车钩力f
cg
分别传输给控制器3,控制器3须判断车钩力f
cg
为拉钩力还是压钩力、实测的偏转角θ与车钩偏转角限值α的大小关系,若车钩偏转角θ大于车钩偏转角限值α,且车钩力f
cg
为压钩力(即f
cg
<0)时,则达到触发条件,控制器3触发所述水平作动器2伸长或缩短,使车钩偏转角始终保持在准静态偏转角附近,至少不超过准静态偏转角的正负10%,越接近准静态偏转角越佳。
53.具体的,车载计算机通过以下方法计算车钩摆角主动控制系统需要输出的抗偏转力矩m和2个水平作动器2所需要提供的输出作用力f1’
、f2’
:
54.结合图3、图4,通过作动器偏转角测量系统8测量出2个所述水平作动器2相对于垂直方向的相对偏转角θ1、θ2,车载计算机4根据实测的偏转角θ、θ1、θ2和准静态车钩偏转角β、车钩力fcg,计算所述车钩摆角主动控制系统需要输出的抗偏转力矩m和2个水平作动器2所需要提供的输出作用力f1’
、f2’
,即m、f1’
、f2’
需要满足以下条件:
55.m=f
cg
·
sinθ-sinβ
·
l156.f1’
sinθ1=f2’
sinθ257.f1’
cosθ1+f2’
cosθ2·
b=m
58.如图4所示,l1是指车钩1的偏转铰接连接点距车体中心线的纵向距离,b是指水平作动器2距车体中心线的横向距离,f1’
、f2’
分别表示2个水平作动器输出的作用力,f1、f2分别表示作用在2个水平作动器上的力,f1与f1’
是一对作用力与反作用力,大小相等,方向相反;f2与f2’
是一对作用力与反作用力,大小相等,方向相反。车钩摆角主动控制系统提供的力矩需要与力矩差值m的大小基本相等(误差范围内即可)、方向相反,力矩差值m等于实测偏转角θ下车钩力作用在车体上的力矩减去准静态车钩偏转角β下车钩力作用在车体上的力矩。由此,可计算出m、f1’
、f2’
的数值。
59.车载计算机4将水平作动器2所需的输出作用力f1’
、f2’
传输给控制器3,所述控制器3根据f1’
、f2’
的大小来控制2个水平作动器2分别伸长和缩短,直至作用力满足计算值。这时,水平作动器2提供拉力或者压力,以满足合适大小的车钩抗偏转力矩。
60.本发明的车钩摆角主动控制系统及控制方法采用定位系统实时获取列车的线路位置,利用车载计算机预存的线路信息,准确及时获得列车所在位置处的预设置的车钩偏转角度限值;同时采用车钩偏转角测量系统和车钩力测量系统,可实时监测车钩力和车钩动态偏转行为,确保所计算的车钩抗偏转力矩结果的准确性和及时性,进而保证作动器反应的精确性。本发明解决了列车在较大纵向压钩力作用下车钩出现“之”字形时产生较大横向分力引起脱轨的问题,通过采取本车钩摆角主动控制系统及控制方法,水平作动器可以在各种线路上迅速准确做出反应,满足车钩偏转摆角限值的要求,从而提高了列车的运输安全性和效率。
61.上述实施例阐明的内容应当理解为这些实施例仅用于更清楚地说明本发明,而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落入本技术所附权利要求所限定的范围。