1.本技术涉及车辆控制的领域,尤其是涉及一种电控信号智能化处理方法和装置。
背景技术:
2.摩托车是依靠手把操作进行转向的二轮车或三轮车,具有轻便灵活的特点。且通常摩托车的油门多集成至右把手处,即驾驶员可通过拧右把手实现控制摩托车的速度。
3.生活中,为了提高通行效率,起步或加速的情况下,通常会大幅度的加大油门(即增大油门把手的拧转角度)以控制车辆的驱动力明显大于当前的行驶阻力,进而使得车辆具有一个较大的加速度,以实现大幅度的缩短起步或加速时间。
4.在上述情况下,当驾驶员控制车辆加速至特定车速后,驾驶员需要减小油门(即减小油门把手的拧转角度)以控制车辆的驱动力减小至等于该特定车速下的行驶阻力,进而使得车辆维持该特定车速。
5.针对上述中的相关技术,发明人认为驾驶员主要依靠经验判断油门减小的程度,可能导致油门减小的过多(即油门把手的拧转角度过小),则驱动力小于该特定车速下的行驶阻力而导致车辆减速,需要驾驶员多次反复调整油门把手的拧转角度。
技术实现要素:
6.为了便于驾驶员控制车辆加速至特定车速,本技术提供一种电控信号智能化处理方法和装置。
7.第一方面,本技术提供的一种电控信号智能化处理方法,采用如下的技术方案:一种电控信号智能化处理方法,包括以下步骤:获取车辆的实时车速值;获取油门把手的拧转角度值;在实时车速值小于预设的设定车速值的情况下,响应于所述拧转角度值的增大以控制车辆加速;在实时车速值不小于预设的设定车速值的情况下,控制车辆维持当前车速并响应于所述拧转角度值的减小以控制车辆减速。
8.通过采用上述技术方案,在驾驶员大幅度的加大油门(即增大油门把手的拧转角度)以控制车辆的驱动力明显大于当前的行驶阻力,进而使得车辆具有一个较大的加速度,以实现大幅度的缩短起步或加速时间的情况下,在车辆的实时车速达到设定车速后,即使驾驶员控制油门把手保持当前的拧转角度,但车辆仍维持在设定车速,无需驾驶员反复调整油门把手的拧转角度;同时,响应于驾驶员减小油门把手的拧转角度以控制车辆减速。
9.优选的,还包括以下步骤:获取当前路段的限速值;基于所述限速值和预设的车速设定机制以生成第一设定值;基于所述第一设定值以更新所述设定车速值。
10.通过采用上述技术方案,交管部门基于路段的路况设置当前路段的限速,以提醒
驾驶员合理控制车速,因此,基于当前路段的限速值自动更新设定车速值,进而使得车辆的车速控制在合理范围内,有利于保障驾驶安全。
11.优选的,还包括以下步骤:在所述拧转角度值不等于最大值的情况下,开始累计计时并生成第一计时时间;在所述第一计时时间超过第一预设时间的情况下,响应于等于最大值的拧转角度值以控制车辆加速至预设的超车车速值。
12.通过采用上述技术方案,驾驶车辆在道路上行驶,当需要超车时,响应于驾驶员控制油门把手至最大拧转角度的操作以控制车辆加速至预设的超车车速值,以缩短超车所需的时间,有利于保障超车过程中的驾驶安全。
13.优选的,还包括以下步骤:在所述拧转角度值等于最大值的情况下,开始累计计时并生成第二计时时间;步骤在所述第一计时时间超过第一预设时间的情况下,响应于等于最大值的拧转角度值以控制车辆加速预设的超车车速值中,包括:在所述第一计时时间超过第一预设时间,且所述第二计时时间超过第二预设时间的情况下,响应于等于最大值的拧转角度值以控制车辆加速预设的超车车速值。
14.通过采用上述技术方案,当需要超车时,在驾驶员控制油门把手至最大拧转角度并保持第二预设时间以上后,才响应于驾驶员的操作以控制车辆加速至预设的超车车速值,有效防止驾驶员误操作。
15.优选的,步骤在所述拧转角度值等于最大值的情况下,开始累计计时并生成第二计时时间中,包括:在所述实时车速值不小于设定车速值,且所述拧转角度值等于最大值的情况下,开始累计计时并生成第二计时时间;在所述拧转角度值小于最大值,且拧转角度值与最大值之间的差值大于角度阈值的情况下,所述第二计时时间清零;在所述实时车速值小于设定车速值,且实时车速值与设定车速值之间的差值大于车速阈值的情况下,所述第二计时时间清零。
16.通过采用上述技术方案,仅在车辆维持设定车速值的情况下,才可能响应于驾驶员的操作以控制车辆加速至超车车速,避免车辆起步时直接加速至超车车速,有利于驾驶安全;同时,通过与角度阈值、车速阈值的比较,以在颠簸的路况下,仍正确响应于驾驶员的操作以控制车辆加速至超车车速。
17.优选的,步骤在所述拧转角度值不等于最大值的情况下,开始累计计时并生成第一计时时间中,包括:在所述实时车速值不小于设定车速值,且所述拧转角度值不等于最大值的情况下,开始累计计时并生成第一计时时间;在所述实时车速值小于设定车速值,且实时车速值与设定车速值之间的差值大于车速阈值的情况下,所述第一计时时间清零。
18.通过采用上述技术方案,仅在车辆维持设定车速值的情况下,才可能响应于驾驶员的操作以控制车辆加速至超车车速,避免车辆起步时直接加速至超车车速,有利于驾驶安全。
19.优选的,还包括以下步骤:基于所述设定车速值和预设的阈值设定机制以生成车速阈值。
20.通过采用上述技术方案,车辆于颠簸的路况下行驶,从同一个凹陷处通过时,车辆的车速越快,则车速的变化量越小,因此,基于设定车速值以生成车速阈值,实现适配不同设定车速值,进而正确响应于驾驶员的操作以控制车辆加速至超车车速。
21.优选的,还包括以下步骤:响应于驾驶员的操作以生成第二设定值;基于所述第二设定值以更新所述设定车速值。
22.通过采用上述技术方案,实现可由驾驶员自由设置设定车速值,进而便于驾驶员控制车辆加速至(驾驶员想要的)特定车速。
23.第二方面,本技术提供一种电控信号智能化处理装置,采用如下的技术方案:一种电控信号智能化处理装置,包括车速检测模块、油门检测模块和处理模块;所述车速检测模块用于获取车辆的实时车速值,并将实时车速值发送至处理模块;所述油门检测模块用于获取油门把手的拧转角度值,并将拧转角度值发送至处理模块;所述处理模块中预设有设定车速值;在实时车速值小于预设的设定车速值的情况下,所述处理模块响应于所述拧转角度值的增大以控制车辆加速;在实时车速值不小于设定车速值的情况下,所述处理模块控制车辆维持当前车速并响应于所述拧转角度值的减小以控制车辆减速。
24.通过采用上述技术方案,在驾驶员大幅度的加大油门(即增大油门把手的拧转角度)以控制车辆的驱动力明显大于当前的行驶阻力,进而使得车辆具有一个较大的加速度,以实现大幅度的缩短起步或加速时间的情况下,在车辆的实时车速达到设定车速后,即使驾驶员控制油门把手保持当前的拧转角度,但车辆仍维持在设定车速,无需驾驶员反复调整油门把手的拧转角度;同时,响应于驾驶员减小油门把手的拧转角度以控制车辆减速。
25.优选的,还包括人机交互模块和路况获取模块;所述人机交互模块用于响应于驾驶员的操作以生成第二设定值,并将第二设定值发送至处理模块;所述路况获取模块用于获取当前路段的限速值,并将限速值发送至处理模块;所述处理模块基于限速值和预设的车速设定机制以生成第一设定值;所述处理模块基于第一设定值和第二设定值以生成设定车速值。
26.通过采用上述技术方案,基于当前路段的限速值和第二设定值自动更新设定车速值,进而使得车辆的车速控制在合理范围内,有利于保障驾驶安全。
27.综上所述,本技术包括以下至少一种有益技术效果:1.在驾驶员大幅度的加大油门(即增大油门把手的拧转角度)以控制车辆的驱动力明显大于当前的行驶阻力,进而使得车辆具有一个较大的加速度,以实现大幅度的缩短起步或加速时间的情况下,在车辆的实时车速达到设定车速后,即使驾驶员控制油门把手保持当前的拧转角度,但车辆仍维持在设定车速,无需驾驶员反复调整油门把手的拧转角度;同时,响应于驾驶员减小油门把手的拧转角度以控制车辆减速;
2.当前车辆的车速达到设定车速,同时,前方车辆以不低于设定车速的速度行驶,则在第一计时时间超过第一预设时间,且第二计时时间超过第二预设时间的情况下,响应于等于最大值的拧转角度值以控制车辆加速至预设的超车车速值,以实现超车的目的。
附图说明
28.图1是电控信号智能化处理装置的结构框图。
29.图2是电控信号智能化处理方法中,生成并更新设定车速值v的流程图。
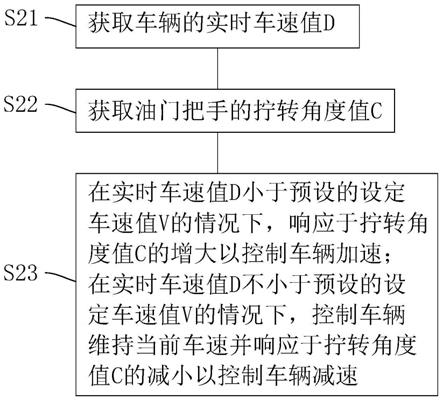
30.图3是电控信号智能化处理方法中,控制车速的流程图。
31.图4是电控信号智能化处理方法中,控制车辆超车的流程图。
32.附图标记说明:1、处理模块;2、人机交互模块;3、路况获取模块;4、车速检测模块;5、油门检测模块。
具体实施方式
33.以下结合附图1-4对本技术作进一步详细说明。
34.参照图1,本技术实施例公开一种电控信号智能化处理装置,包括处理模块1、人机交互模块2、路况获取模块3、车速检测模块4和油门检测模块5。
35.处理模块1主要用于数据的存储和处理。
36.人机交互模块2用于响应于驾驶员的操作以生成第二设定值,并将第二设定值发送至处理模块1。在一个实施例中,人机交互模块2可采用触摸屏显示器,则人机交互模块2基于触控技术实现响应于驾驶员的触摸操作以生成第二设定值。在另一个实施例中,人机交互模块2可采用语音控制器,则人机交互模块2基于语音识别技术实现采集驾驶员的声音信息以生成第二设定值。
37.路况获取模块3用于获取当前路段的限速值,并将限速值发送至处理模块1。在一个实施例中,路况获取模块3包括定位芯片和处理器。定位芯片用于获取当前位置的位置信息,且定位芯片发送位置信息至处理器。处理器中预设有电子交通地图,且电子交通地图包括各个路段和每个路段的限速值。处理器接收位置信息以发送与对应于该位置信息的路段对应的限速值至处理模块1。
38.处理模块1基于限速值和预设的车速设定机制以生成第一设定值;并且,处理模块1基于第一设定值和第二设定值以生成并更新设定车速值。
39.车速检测模块4用于获取车辆的实时车速值,并将实时车速值发送至处理模块1。在一个实施例中,车速检测模块4可采用车速传感器。
40.油门检测模块5用于获取油门把手的拧转角度值,并将拧转角度值发送至处理模块1。在一个实施例中,油门检测模块5可采用角度传感器。
41.处理模块1基于实时车速值、设定车速值和拧转角度值以控制车辆的车速。
42.以下结合上述的电控信号智能化处理装置对处理方法进行详细说明。
43.本技术实施例还公开一种电控信号智能化处理方法,包括以下步骤:参照图2,s11,获取当前路段的限速值v0。
44.具体的,路况获取模块3中的定位芯片获取当前位置的位置信息,并将位置信息发送至处理器。处理器接收位置信息并基于电子交通地图以发送与对应于该位置信息的路段
对应的限速值v0至处理模块1。
45.s12,基于限速值v0和预设的车速设定机制以生成第一设定值v1。
46.处理模块1中预设有车速设定机制。本实施例中,车速设定机制配置为:v1=v0
×
n%,在v0≤50km/h的情况下,n=150-v0;在v0>50km/h的情况下,n=100-(v0-50)/7。
47.在其他实施例中,车速设定机制可配置为v1=v0
×
n%,式中,0<n≤100,并优选n=90。
48.s13,响应于驾驶员的操作以生成第二设定值v2。
49.具体的,在一个实施例中,响应于驾驶员在触摸屏显示器上的触摸操作以生成第二设定值v2。
50.s14,基于第一设定值v1和第二设定值v2以生成并更新设定车速值v。
51.具体的,在v1≤v2的情况下,则处理模块1设定v=v1;在v1>v2的情况下,则处理模块1设定v=v2。
52.参照图3,s21,获取车辆的实时车速值d。
53.在一个实施例中,通过车速传感器获取车辆的实时车速值d,并将实时车速值d发送至处理模块1。
54.s22,获取油门把手的拧转角度值c。
55.在一个实施例中,通过角度传感器获取油门把手的拧转角度值,并将拧转角度值发送至处理模块1。
56.s23,在实时车速值d小于预设的设定车速值v的情况下,响应于拧转角度值c的增大以控制车辆加速;在实时车速值d不小于预设的设定车速值v的情况下,控制车辆维持当前车速并响应于拧转角度值c的减小以控制车辆减速。
57.具体的,处理模块1接收实时车速值d和拧转角度值c。在车辆未达到设定车速的情况下,处理模块1响应于拧转角度值c的增大以控制车辆加速。在车辆达到设定车速的情况下,处理模块1控制车辆维持当前车速并响应于拧转角度值c的减小以控制车辆减速。
58.需要说明的是,在车辆采用汽油机作为动力源的情况下,处理模块1主要通过控制节气门的开度以实现控制车辆的车速(加速、减速或维持)。
59.参照图4,s24,在拧转角度值c不等于最大值cmax的情况下,开始累计计时并生成第一计时时间。
60.步骤s24中,包括以下步骤:s241,基于设定车速值v和预设的阈值设定机制以生成车速阈值s1。
61.处理模块1中预设有阈值设定机制。本实施例中,阈值设定机制配置为:s1=v
×
m%,3≤m≤5。
62.s242,在实时车速值d不小于设定车速值v,且拧转角度值c不等于最大值cmax的情况下,开始累计计时并生成第一计时时间。
63.s243,在实时车速值d小于设定车速值v,且实时车速值d与设定车速值v之间的差值大于车速阈值s1的情况下,第一计时时间清零。
64.具体的,在车辆维持设定车速,且油门把手未拧转至最大角度时,开始累计计时并生成第一计时时间。需要说明的是,车辆行驶过程中,道路可能存在凹陷或上下坡,进而导致车辆的实时车速值d存在波动。因此,通过设置车速阈值s1,并将实时车速值d与设定车速
值v之间的差值与车速阈值s1进行比较,以实现当实时车速值d发生波动时,判断车辆仍维持在设定车速,且第一计时时间继续累计计时。
65.s25,在拧转角度值c等于最大值cmax的情况下,开始计时并生成第二计时时间。
66.步骤s25中,包括以下步骤:s251,基于设定车速值v和预设的阈值设定机制以生成并更新角度阈值s2。
67.本实施例中,阈值设定机制还配置为:s2=v
×
k%,3≤k≤5。
68.s252,在实时车速值d不小于设定车速值v,且拧转角度值c等于最大值cmax的情况下,开始累计计时并生成第二计时时间。
69.s253,在拧转角度值c小于最大值cmax,且拧转角度值c与最大值cmax之间的差值大于角度阈值s2的情况下,第二计时时间清零。
70.s254,在实时车速值d小于设定车速值v,且实时车速值d与设定车速值v之间的差值大于车速阈值s1的情况下,第二计时时间清零。
71.具体的,车辆行驶过程中,道路可能存在凹陷或上下坡,进而导致车辆震动,且车辆的震动将导致驾驶员的手部可能发生小幅的颤抖,进而导致油门把手的拧转角度值c存在波动。因此,通过设置角度阈值s2,并将拧转角度值c与最大值cmax之间的差值与角度阈值s2进行比较,以实现当拧转角度值c发生波动时,判断油门把手维持拧转至最大角度,且第二计时时间继续累计计时。
72.s26,在第一计时时间超过第一预设时间的情况下,响应于等于最大值cmax的拧转角度值c以控制车辆加速至预设的超车车速值。
73.步骤s26中,包括以下步骤:s261,基于限速值v以生成并更新超车车速值v3。
74.本实施例中,v3=v。
75.s262,在第一计时时间超过第一预设时间,且第二计时时间超过第二预设时间的情况下,响应于等于最大值cmax的拧转角度值c以控制车辆加速至预设的超车车速值。
76.具体的,驾驶车辆在道路上行驶时,存在下列情况:情况一、当前车辆的车速未达到设定车速,同时,前方车辆以低于设定车速的速度行驶,则当前车辆可加速至设定车速即可实现超车;情况二、当前车辆的车速未达到设定车速,同时,前方车辆以不低于设定车速的速度行驶,则当前车辆可加速至设定车速并正常行驶;情况三、当前车辆的车速达到设定车速,同时,前方车辆以低于设定车速的速度行驶,则当前车辆可以直接实现超车;情况四、当前车辆的车速达到设定车速,同时,前方车辆以不低于设定车速的速度行驶,则在第一计时时间超过第一预设时间,且第二计时时间超过第二预设时间的情况下,响应于等于最大值cmax的拧转角度值c以控制车辆加速至预设的超车车速值,以实现超车的目的。
77.本技术实施例一种电控信号智能化处理方法的实施原理为:在驾驶员大幅度的加大油门(即增大油门把手的拧转角度)以控制车辆的驱动力明显大于当前的行驶阻力,进而使得车辆具有一个较大的加速度,以实现大幅度的缩短起步或加速时间的情况下,在车辆的实时车速达到设定车速后,即使驾驶员控制油门把手保持当前的拧转角度,但车辆仍维
持在设定车速,无需驾驶员反复调整油门把手的拧转角度;同时,响应于驾驶员减小油门把手的拧转角度以控制车辆减速。
78.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。