1.本发明属于轨道检测技术领域,尤其是一种远程操控智能化轨道探伤车及探伤方法。
背景技术:
2.随着我国经济的高速发展,铁路和轨道交通的重要作用越来越凸显,铁轨一旦出现意外将会产生毁灭性的结果和不可估量的损失。列车在运行的过程会对钢轨产生摩擦、挤压、弯曲以及冲击作用,使轨道出现各样的损伤,导致钢轨折断等各种铁路事故。对铁路轨道进行实时伤损检测是保证轨道安全运行的重要措施。
3.钢轨探伤车是装在轨道上检测钢轨伤损设备的专用车辆或专用列车,我国目前主要的铁路探伤设备的手推式钢轨探伤车,手推式小型探伤车穿透能力强,检测敏感性好,同时有较高的检出率,但是探伤效率低下且需要耗费很大人力,探伤结果也会受操作人员的经验、操作习惯等人为因素的影响。而大型的探伤车功能齐全,检测速率高,监测的准确性好、数据可以实时处理,也可进行存储和回放等优点。
4.但是大型钢轨探伤车检测环境受限因素较多,一般需要轨面平整清洁、而且检测方式为离线式的轨道检测。小型手推式探伤设备检测速率底,不能满足行的铁路探伤需求;而大型探伤车还没有实现国有化生产,技术被国外垄断,昂贵的价格使配置数量受到一定的限制,开展有效的工作比较困难。
5.根据世界铁路钢轨探伤车技术发展现状,按照经济、实用的原则确定我国铁路钢轨探伤车的检测速度定位,需要结合手推式小型钢轨探伤车的精准度与大型钢轨探伤车的速度,并通过远程操控等方式实现智能化的轨道探伤。
6.针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
7.发明目的:提供一种远程操控智能化轨道探伤车及探伤方法,以克服现有相关技术所存在的上述技术问题。
8.技术方案:根据本发明的另一方面,提供了一种远程操控智能化轨道探伤车,包括机体,该机体四周均设置有探伤轮,该机体顶端一侧设置有承接板,承接板顶端设置有两侧均设置有智能座椅,两个智能座椅之间设置有扶手箱,且扶手箱设置在承接板顶端,扶手箱顶端通过连接轴与控制面板固定连接,承接板远离智能座椅一侧设置有一组固定支架,且固定支架底端固定在机体上;机体远离固定支架的一侧设置有连接板,连接板两端均设置有第一感应器组件,连接板顶端设置有若干连杆一,若干连杆一顶端设置有连接架,连接架顶端中间位置设置有主探照灯,连接板顶端且位于若干连杆一外侧设置有辅探照灯;机体两端中部均设置有第二感应器组件,机体靠近连接板的一侧顶端设置有连接柱一,连接柱一顶端设置有调节机构,调节机构顶端设置有安装板,安装板顶端设置有固定组件,固定组件内部设置有计算机。
9.在进一步的实施例中,若干探伤轮上方均设置有防护壳,且防护壳一侧与机体侧面固定连接,防护壳均为与探伤轮相配合的半弧形形状,从而使得在防护壳的作用下,避免操作人员在工作过程中不小心碰到探伤轮的现象,同时防护壳的半弧形结构使得防护壳更加紧密的贴合探伤轮,使得该探伤车的外形更加美观。
10.在进一步的实施例中,智能座椅两端均设置有防护板,且防护板固定在其中两个防护壳顶端,且防护板上均为开设有若干通孔,从而使得在防护板的作用下,保证操作人员在工作过程中的安全,同时智能座椅上配备有安全带,可以进一步的保证操作人员的安全。
11.在进一步的实施例中,承接板顶端且位于两个智能座椅之间一侧设置有支撑柱二,支撑柱二顶端设置有遮阳顶盖,从而使得在遮阳顶盖的作用下,遮挡阳光,避免在白天工作时的暴晒现象,提高操作人员的舒适感,此外,主驾与副驾同时坐在探伤车检测时,当主驾检测出铁路损伤就会将受损的具体信息经过计算机分析后发送到云端,并提醒副驾进行下车修理,检修人员对数据充分了解后利用车载维修设备工具对铁路进行实时维修,维修后通过探伤车的第一感应器组件与第二感应器组件对铁路进行再次检测,检测维修是否彻底。
12.在进一步的实施例中,第二感应器组件包括设置在机体一侧的感应器本体,感应器本体顶端设置有警报按钮,感应器本体底端均匀设置有若干感应探测头,从而使得在感应探测头的作用下,通过对铁轨进行发射激光,并将收集的数据传送至计算机上,可以立刻检测出该路段中铁轨的受损程度。
13.在进一步的实施例中,调节机构包括设置在连接柱一顶端的固定底板,固定底板顶端两侧的电机一与电机二,电机一一侧设置有连接杆,连接杆圆周外侧套设有连接套一,连接套一顶端设置有连接框架;连接杆远离电机一的一端设置有固定板一,固定板一一侧设置有蜗杆,且蜗杆靠近电机二的一端贯穿固定板二并与电机二的输出轴固定连接,蜗杆顶端设置有相啮合的蜗轮,且蜗轮两侧与连接框架活动连接,连接框架中部设置有与蜗轮相配合的转动架,转动架底端设置有连杆二,连接框架底端设置有与电机二输出轴相配合的连接套二,且连接套二与电机二的输出轴之间设置有轴承,从而使得在调节机构的作用下,当操作人员使用计算机时,可以根据操作人员的需要,对计算机进行任意角度的调节,从而保证操作人员使用的舒适度。
14.在进一步的实施例中,固定组件包括设置在安装板顶端两侧的固定侧板,固定侧板一侧通过螺栓与转动阀活动连接,且螺栓远离转动阀的一端设置有推动板,且推动板与计算机两侧相配合,从而使得固定组件对计算机进行固定夹持,从而保证计算机的使用安全。
15.在进一步的实施例中,安装板两端分别设置有一组连接块与一组侧板,且一组连接块与一组侧板均与计算机相配合,从而使得安装板两端的一组连接块与一组侧板,可以配合固定组件对计算机进行辅助作用,防止计算机在使用过程中出现纵向的滑落,从而造成计算机的损坏。
16.根据本发明的另一方面,还提供了一种远程操控智能化轨道探伤车的探伤方法,该探伤方法包括以下步骤:步骤一:在检测时,操作人员坐在智能座椅顶端,并通过控制面板启动探伤机的机体,并在探伤轮的作用下,带动探伤机的机体在铁轨上行驶,并在行驶过程中通过控制面板
打开第一感应器组件与第二感应器组件;步骤一:通过第一感应器组件激光探测铁轨,通过第二感应器组件的超声波探测铁轨,并将检测的数据传送至计算机上,并通过计算机上传至云端,并通过专业技术人员对该路段的铁轨进行数据检测,并判断铁轨的受损程度。
17.有益效果:1、该探伤车具备两个探伤器,探伤车前端的第一感应器组件通过超声波探测的方式对铁轨进行损伤探测,并将探测结果直接上传至探伤车上的计算机中,当发现铁轨损伤严重时,及时下车进行标记,同时为提高检测的准确性,探伤车的中部两侧设置有第二感应器组件,该第二感应器组件探测采用的是激光扫描成像技术,并通过激光对铁轨进行扫描,将扫描的结果同样上传至云端,并配合第一感应器组件对发现的损伤地点进行二次的检测,保证检测的准确。
18.2、该装置前端设置有主探照灯与辅探照灯,主探照灯具备超远的探照功能,但是光线过强,会影响对面的来车,因此需要与辅探照灯之间互相配合,从而当无人的时候,利用主探照灯进行夜间工作,当发现有人过着车辆时,更换主探照灯进行工作,主探照灯与主探照灯之间的配合,使得该探伤车更加人性化的进行探伤作业,同时在工作人员处理计算机中的时时数据时,为了更好的对计算机进行操作,也为了不同的操作人员都可以更好的使用计算机。
19.3、在调节装置的作用下,可以通过调节装置对安装板进行角度的调节,来改变安装板的位置与角度,并根据操作人员的需求进行角度的调节,从而使得操作人员可以更加舒适的进行操作,同时在固定组件的作用下,将放置在安装板内的计算机进行固定,从而防止计算机的掉落。
20.4、该智能座椅采用双人驾驶模式,主驾与副驾同时坐在探伤车检测时,当主驾检测出铁路损伤就会将受损的具体信息经过计算机分析后发送到云端,并提醒副驾进行下车修理,检修人员对数据充分了解后利用车载维修设备工具对铁路进行实时维修,维修后通过探伤车的第一感应器组件与第二感应器组件对铁路进行再次检测,检测维修是否彻底。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
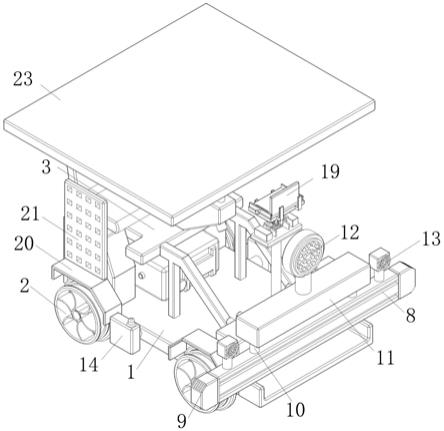
22.图1是根据本发明实施例的结构示意图之一;图2是根据本发明实施例的结构示意图之二;图3是根据本发明实施例的结构示意图之三;图4是根据本发明实施例中调节机构、安装板及固定组件的装配图;图5是根据本发明实施例中固定组件的结构示意图;图6是根据本发明实施例中调节机构的结构示意图之一;图7是根据本发明实施例中调节机构的结构示意图之二;图8是根据本发明实施例中第二感应器组件的结构示意图;
图9是根据本发明实施例中探伤轮的结构示意图。
23.图中:1、机体;2、探伤轮;3、承接板;4、智能座椅;5、扶手箱;6、控制面板;7、固定支架;8、连接板;9、第一感应器组件;10、连杆一;11、连接架;12、主探照灯;13、辅探照灯;14、第二感应器组件;1401、感应器本体;1402、警报按钮;1403、感应探测头;15、连接柱一;16、调节机构;1601、固定底板;1602、电机一;1603、电机二;1604、连接杆;1605、连接套一;1606、连接框架;1607、固定板一;1608、蜗杆;1609、固定板二;1610、蜗轮;1611、转动架;17、安装板;1701、连接块;1702、侧板;18、固定组件;1801、固定侧板;1802、螺栓;1803、转动阀;1804、推动板;19、计算机;20、防护壳;21、防护板;22、支撑柱二;23、遮阳顶盖。
具体实施方式
24.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
25.根据本发明的实施例,提供了一种远程操控智能化轨道探伤车及探伤方法。
26.如图1-9所示,根据本发明实施例的远程操控智能化轨道探伤车,包括机体1,该机体1四周均设置有探伤轮2,该机体1顶端一侧设置有承接板3,其特征在于:承接板3顶端设置有两侧均设置有智能座椅4,两个智能座椅4之间设置有扶手箱5,且扶手箱5设置在承接板3顶端,扶手箱5顶端通过连接轴与控制面板6(内含有plc控制器)固定连接,承接板3远离智能座椅4一侧设置有一组固定支架7,且固定支架7底端固定在机体1上;机体1远离固定支架7的一侧设置有连接板8,连接板8两端均设置有第一感应器组件9,连接板8顶端设置有若干连杆一10,若干连杆一10顶端设置有连接架11,连接架11顶端中间位置设置有主探照灯12,连接板8顶端且位于若干连杆一10外侧设置有辅探照灯13;机体1两端中部均设置有第二感应器组件14,机体1靠近连接板8的一侧顶端设置有连接柱一15,连接柱一15顶端设置有调节机构16,调节机构16顶端设置有安装板17,安装板17顶端设置有固定组件18,固定组件18内部设置有计算机19。
27.在一个实施例中,对于上述探伤轮2来说,若干探伤轮2上方均设置有防护壳20,且防护壳20一侧与机体1侧面固定连接,防护壳20均为与探伤轮2相配合的半弧形形状,从而使得在防护壳20的作用下,避免操作人员在工作过程中不小心碰到探伤轮2的现象,同时防护壳20的半弧形结构使得防护壳20更加紧密的贴合探伤轮,使得该探伤车的外形更加美观;在具体应用时,所有探伤轮2的内侧均设置有大于探伤轮的铁圈,该铁圈的内部设置有若干小型凸起快,可以在探伤车出现紧急情况时,通过按下扶手箱5底端的警报器(图中存在但并未具体描述),通过警报器传递给控制箱6,并通过控制箱6控制铁圈上的若干小型凸起快向外缓慢的伸出,并与地面接触,从而达到刹车目的。
28.在一个实施例中,对于上述智能座椅4来说,智能座椅4两端均设置有防护板21,且防护板21固定在其中两个防护壳20顶端,且防护板21上均为开设有若干通孔,从而使得在防护板21的作用下,保证操作人员在工作过程中的安全,同时智能座椅4上配备有安全带,
可以进一步的保证操作人员的安全;在具体应用时,该智能座椅采用双人模式,可以一人进行操控探伤车,一人进行辅助作用,并在行驶过程中,副驾的人可以在系上安全带的同时手扶防护板21上的若干通孔,或者手扶控制箱6,使得该探伤车的设计更加巧妙,使得操作人员使用的更加舒适。
29.在一个实施例中,对于上述承接板3来说,承接板3顶端且位于两个智能座椅4之间一侧设置有支撑柱二22,支撑柱二22顶端设置有遮阳顶盖23,从而使得在遮阳顶盖23的作用下,遮挡阳光,避免在白天工作时的暴晒现象,提高操作人员的舒适感,此外,主驾与副驾同时坐在探伤车检测时,当主驾检测出铁路损伤就会将受损的具体信息经过计算机分析后发送到云端,并提醒副驾进行下车修理,检修人员对数据充分了解后利用车载维修设备工具对铁路进行实时维修,维修后通过探伤车的第一感应器组件9与第二感应器组件14对铁路进行再次检测,检测维修是否彻底;在具体应用时,该遮阳顶盖23可以通过支撑柱二22进行拆卸与安装,并对遮阳顶盖23进行更换,同时遮阳顶盖23的形状并不限于该发明中的形状,还可以是其他形状,例如伞状,或者圆形形状等等。
30.在一个实施例中,对于上述第二感应器组件14来说,第二感应器组件14包括设置在机体1一侧的感应器本体1401,感应器本体1401顶端设置有警报按钮1402,感应器本体1401底端均匀设置有若干感应探测头1403,从而使得在感应探测头1403的作用下,通过对铁轨进行发射激光,并将收集的数据传送至计算机上,可以立刻检测出该路段中铁轨的受损程度;在具体应用时,计算机作为本发明的重要组件之一,可以将得到的检测数据进行自动分析,并将检测数据自动上传至云端服务器中,同时云端服务器也会有操作人员对该路段的的受损程度进行分析,保证分析数据的可靠性。
31.在一个实施例中,对于上述调节机构16来说,调节机构16包括设置在连接柱一15顶端的固定底板1601,固定底板1601顶端两侧的电机一1602与电机二1603,电机一1602一侧设置有连接杆1604,连接杆1604圆周外侧套设有连接套一1605,连接套一1605顶端设置有连接框架1606;连接杆1604远离电机一1602的一端设置有固定板一1607,固定板一1607一侧设置有蜗杆1608,且蜗杆1608靠近电机二1603的一端贯穿固定板二1609并与电机二1603的输出轴固定连接,蜗杆1608顶端设置有相啮合的蜗轮1610,且蜗轮1610两侧与连接框架1606活动连接,连接框架1606中部设置有与蜗轮1610相配合的转动架1611,转动架1611底端设置有连杆二1612,连接框架1606底端设置有与电机二1603输出轴相配合的连接套二1613,且连接套二1613与电机二1603的输出轴之间设置有轴承,从而使得在调节机构16的作用下,当操作人员使用计算机时,可以根据操作人员的需要,对计算机进行任意角度的调节,从而保证操作人员使用的舒适度;调节机构16的工作原理如:通过控制面板6控制并启动电机一1602,带动连接杆1604进行转动,带动连接套一1605进行转动,带动连接框架1606在竖直方向进行转动,,从而带动安装板17在竖直方向转动,安装板17可以进行竖直方向的监控,在控制面板6控制并启动电机二1603,在电机二1603的输出轴作用下带动蜗杆1608进行转动,从而带动转动架1611进行水平方向的转动,从而实现了安装板17在水平方向的转动。
32.在一个实施例中,对于上述固定组件18来说,固定组件18包括设置在安装板17顶
端两侧的固定侧板1801,固定侧板1801一侧通过螺栓1802与转动阀1803活动连接,且螺栓1802远离转动阀1803的一端设置有推动板1804,且推动板1804与计算机19两侧相配合,从而使得固定组件18对计算机19进行固定夹持,从而保证计算机19的使用安全;固定组件18的工作原理如:通过拧动转动阀1803,并在螺栓1802的作用下,带动推动板1804向内侧移动,并对计算机19进行固定夹持,从而保证计算机19的使用安全。
33.在一个实施例中,对于上述安装板17来说,安装板17两端分别设置有一组连接块1701与一组侧板1702,且一组连接块1701与一组侧板1702均与计算机19相配合,从而使得安装板17两端的一组连接块1701与一组侧板1702,可以配合固定组件18对计算机进行辅助作用,防止计算机在使用过程中出现纵向的滑落,从而造成计算机的损坏。
34.根据本发明的另一实施例,还提供了一种可快速自动供料的双工位焊接机器人的探伤方法,该探伤方法包括以下步骤:步骤一:在检测时,操作人员坐在智能座椅4顶端,并通过控制面板6启动探伤机的机体1,并在探伤轮2的作用下,带动探伤机的机体1在铁轨上行驶,并在行驶过程中通过控制面板6打开第一感应器组件9与第二感应器组件14;步骤一:通过第一感应器组件9超声波探测铁轨,通过第二感应器组件14的激光探测铁轨,并将检测的数据传送至计算机19上,并通过计算机19上传至云端,并通过专业技术人员对该路段的铁轨进行数据检测,并判断铁轨的受损程度。
35.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
36.在具体应用时,检测人员操作人员坐在智能座椅4顶端并携带陪同的操作人员坐在副驾,并通过控制面板6启动探伤机的机体1的发动机,并在探伤轮2的作用下,带动探伤机的机体1在铁轨上行驶,并在行驶过程中通过控制面板6打开第一感应器组件9与第二感应器组件14,主驾与副驾同时坐在探伤车检测时,当主驾检测出铁路损伤就会将受损的具体信息经过计算机19分析后发送到云端,并提醒副驾进行下车修理,检修人员对数据充分了解后利用车载维修设备工具对铁路进行实时维修,维修后通过探伤车的第一感应器组件9与第二感应器组件14对铁路进行再次检测,检测维修是否彻底,并通过控制面板6控制并启动电机一1602,在电机二1602的输出轴作用下带动连接杆1604进行转动,从而带动连接套一1605进行转动,从而带动连接框架1606在竖直方向进行转动,从而带动转动架1611在竖直方向转动,从而带动连杆二1612在竖直方向转动,从而带动安装板17在竖直方向转动,安装板17可以进行竖直方向的监控,同时控制面板6控制并启动电机二1603,在电机二1603的输出轴作用下带动蜗杆1608进行转动,同时在轴承的作用下带动相啮合的蜗轮1610进行转动,从而带动转动架1611进行水平方向的转动,从而带动连杆二1612在水平方向转动,从而实现了安装板17在水平方向的转动,同时在电机一1602与电机二1603的配合作用下,从而实现了安装板多角度的转动,并通过拧动转动阀1803,并在螺栓1802的作用下,带动推动板1804向内侧移动,并对计算机19进行固定夹持,从而保证计算机19的使用安全,从而实现操作人员实时操控计算机。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。