1.本发明属于无人驾驶控制领域,具体涉及一种无人矿车倒车控制方法。
背景技术:
2.当前煤矿开采主要有井工开采和露天开采两种方式,露天开采难度及危险系数相对较低,而井工开采利用井筒(立井开拓、斜井开拓、平峒开拓或综合开拓等)和地下巷道系统,导致技术难度以及危险性相对更高。大部分煤矿资源埋藏在地下,井下开采方式占比更高。其中,井工矿运输分为无轨运输和有轨运输,无轨运输是指运输车辆通过井下巷道来运送人、物资等。井工矿道路环境复杂、道路狭窄且坡度较大,其中倒车硐室空间狭小。以上环境特征,对于在井下巷道实施无人运输技术提出了更高要求,尤其是对无人驾驶车辆的控制方法要求更精确。
3.无人驾驶车辆控制技术的横向控制模块用于控制车辆的方向盘转角或扭矩,基于几何学模型的横向控制方法主要通过描述车辆转向与轨迹的几何关系实现。而纯追踪方法是基于阿克曼转向通过几何模型推导得出,阿克曼转向几何模型可以抽象为2轮自行车模型,以后轴为中心,通过选取合适的预瞄距离以得到预瞄点,再计算出对应的前轮偏角以实现横向控制。实际车辆速度越快,预瞄距离越长,计算得出的转角越小,从而使直线转向稳定;大曲率的弯道车速越低,预瞄距离越短,计算得出的转角越大,保证转弯横向误差较。
4.鉴于此,目前亟待提出一种无人矿车倒车控制方法。
技术实现要素:
5.为此,本发明提出一种无人矿车倒车控制方法。
6.本发明的无人矿车倒车控制方法,包括:步骤一、驾驶车辆以预定速度倒车,同时以预定采样频率采集车辆倒车过程中的离散坐标点;步骤二、对离散坐标点的集合按照五次多项式拟合为曲线生成规划路径,以预定间隔在曲线中生成离散的轨迹点;所述轨迹点的集合为规划路径的轨迹点;步骤三、获取车辆的定位信息,同时遍历规划路径的轨迹点,计算车辆当前位置与各轨迹点之间的距离,标记其中距离最近的点及其索引为最近点及其索引;步骤四、生成车体坐标系及基于车体坐标系的路径,其中车体坐标系的原点为车体中心,车体前进方向为y轴正半轴,车体向右为x轴正半轴;步骤五、基于车体坐标系的路径信息,通过原始纯追踪方法计算出前轮偏角设计罚函数及前轮偏角。
7.步骤六、基于车体坐标系的路径信息,路劲的第一个点的x坐标为最近点的横向误差,然后根据此横向误差计算前轮偏角设计罚函数,输出控制转角。
8.步骤七、根据步骤六中的控制转角实现转向。
9.优选地,步骤四中生成基于车体坐标系的路径的具体过程为:
以最近点索引的位置为新轨迹的起始位置坐标,输出车辆当前的位置坐标,两者相减后进行平移变换;输出车辆当前的欧拉角进行旋转变换;去除规划路径中车辆已驶过的路径,生成基于车体坐标系的路径。
10.优选地,步骤五中通过如下公式对前轮偏角进行计算:;其中,l为轴距,α为车身中心点与预瞄点连线的夹角,ld为预瞄距离,l0为最小预瞄距离,k和m根据实际车辆标定得出。
11.优选地,步骤六中的前轮偏角设计罚函数如下:;其中,k
out
与c为正的设计参数;当横向误差 》 k
out
ꢀ–ꢀ
c时,罚函数通过增加转向输出减小横向误差、加快收敛速度;当横向误差《 k
out
–ꢀ
c,罚函数通过减小转向输出,降低转向振荡的频率。
12.优选地,人工驾驶车辆以5km/h的速度倒车,通过gps实时采集车行进的离散坐标点,采样频率为100hz。采集完毕后,离散点集合按照五次多项式进行曲线拟合,按照20cm的间隔距离生成一条离散的轨迹点集合即为规划路径的轨迹点。
13.本发明的上述技术方案,相比现有技术具有以下优点:本方法设计了基于时间限制的抗积分饱和pi控制器的纵向控制模块,可以保证车速稳定控制;改进了以纯追踪方法为基础增加罚函数约束的横向控制模块,可以减小横向控制误差并加快收敛速度。
附图说明
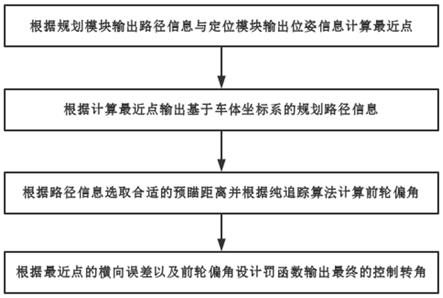
14.图1是本发明实施例提供的方法的流程示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
16.本实施例的无人矿车倒车控制方法,如图1所示,包括:步骤一、驾驶车辆以预定速度倒车,同时以预定采样频率采集车辆倒车过程中的离散坐标点;步骤二、对离散坐标点的集合按照五次多项式拟合为曲线生成规划路径,以预定间隔在曲线中生成离散的轨迹点;所述轨迹点的集合为规划路径的轨迹点;步骤三、获取车辆的定位信息,同时遍历规划路径的轨迹点,计算车辆当前位置与各轨迹点之间的距离,标记其中距离最近的点及其索引为最近点及其索引;步骤四、生成车体坐标系及基于车体坐标系的路径,其中车体坐标系的原点为车体中心,车体前进方向为y轴正半轴,车体向右为x轴正半轴;步骤五、基于车体坐标系的路径信息,通过原始纯追踪方法计算出前轮偏角设计罚函数及前轮偏角。
17.步骤六、基于车体坐标系的路径信息,路劲的第一个点的x坐标为最近点的横向误差,然后根据此横向误差计算前轮偏角设计罚函数,输出控制转角。
18.步骤七、根据步骤六中的控制转角实现转向。
19.优选地,步骤四中生成基于车体坐标系的路径的具体过程为:以最近点索引的位置为新轨迹的起始位置坐标,输出车辆当前的位置坐标,两者相减后进行平移变换;输出车辆当前的欧拉角进行旋转变换;去除规划路径中车辆已驶过的路径,生成基于车体坐标系的路径。
20.优选地,步骤五中通过如下公式对前轮偏角进行计算:;其中,l为轴距,α为车身中心点与预瞄点连线的夹角,ld为预瞄距离,l0为最小预瞄距离,k和m根据实际车辆标定得出。
21.优选地,步骤六中的前轮偏角设计罚函数如下: ;其中,k
out
与c为正的设计参数;当横向误差 》 k
out
ꢀ–ꢀ
c时,罚函数通过增加转向输出减小横向误差、加快收敛速
度;当横向误差《 k
out
–ꢀ
c,罚函数通过减小转向输出,降低转向振荡的频率。
22.优选地,人工驾驶车辆以5km/h的速度倒车,通过gps实时采集车行进的离散坐标点,采样频率为100hz。采集完毕后,离散点集合按照五次多项式进行曲线拟合,按照20cm的间隔距离生成一条离散的轨迹点集合即为规划路径的轨迹点。
23.本发明设计了一种基于改进纯追踪模型的无人矿车倒车控制方法,通过规划模块输入的路径信息以及定位模块输入的车辆位姿信息,求解出最近点,从而输出一条基于车体坐标系的路径,通过此路径信息,根据原始纯追踪方法计算出前轮偏角,设计关于最近点位置横向误差以及前轮偏角的罚函数,最终计算出控制转角。
24.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。