1.本实用新型涉及巡检机器人的技术领域,尤其涉及一种导轨型巡检机器人的防偏行走机构。
背景技术:
2.巡检机器人进行巡检工作具有自主移动、高精度导航和精准定位等功能,导轨型巡检机器人在巡检时,需要在轨道上行走,工作过程中主要通过巡检机器人上的相机感应来进行,所以对机器人行走的平稳度及定位精准度有较高的要求,但目前导轨型巡检机器人在过弯轨时因为方向偏移会导致与导轨之间产生位置偏差,使得巡检机器人晃动比较明显,导致相机不平稳,定位不准,以及导致拍摄不清晰等问题。
技术实现要素:
3.鉴于上述的分析,本实用新型旨在提供一种导轨型巡检机器人的行走机构,用以解决现有导轨型巡检机器人过弯轨不平稳,导致相机不平稳,定位不准,以及导致拍摄不清晰的问题。
4.本实用新型的目的主要是通过以下技术方案实现的:
5.本实用新型提供一种防偏行走机构,包括驱动结构、至少一个摆臂架结构和导轨;
6.所述驱动结构与所述摆臂架结构均沿导轨运动;
7.所述驱动结构自身能够左右移动来消除所述导轨弯曲产生的位置偏移;所述摆臂架结构自身能够左右转动来消除所述导轨弯曲产生的位置偏移,且共同限制行走机构的运行轨迹。
8.可选地,所述驱动结构包括滑轨和滑块,所述滑块与所述滑轨配合滑动。
9.可选地,所述摆臂架结构包括安装座和摆臂支架,所述摆臂支架和所述安装座转动连接。
10.可选地,所述摆臂支架包括设置在所述导轨两侧的第一摆臂分支架和第二摆臂分支架。
11.可选地,所述摆臂架结构还包括下限位轮,所述下限位轮沿着所述导轨的底面滚动。
12.可选地,所述摆臂架结构还包括导向轮,所述导向轮沿着所述导轨的上侧面滚动。
13.可选地,所述摆臂架结构还包括挂轮,所述挂轮沿着所述导轨的下侧面滚动。
14.可选地,所述驱动结构还包括电机和驱动齿轮,所述电机带动所述驱动齿轮转动。
15.可选地,所述驱动结构还包括侧限位轮,所述侧限位轮沿着所述导轨的上侧面滚动。
16.可选地,所述驱动结构还包括上限位轮,所述上限位轮沿着所述导轨的顶侧沿滚动。
17.与现有技术相比,本实用新型提供的防偏行走机构至少可实现如下有益效果之
一:
18.1、本实用新型设计的双摆臂架结构与中间的驱动结构共同限制行走机构的运动轨迹,行走机构在过弯时,驱动结构自身可左右移动、摆臂架结构自身可左右旋转来抵消因运动方向变化产生的位置偏移,使行走结构运行更加平稳顺畅。
19.2、本实用新型设计的侧限位轮与上限位轮均限制驱动结构在导轨上的运动轨迹,使驱动结构运行更平稳;侧限位轮、上限位轮均具有一定的弹性,使驱动齿轮紧贴齿条,有效防止驱动齿轮拖齿。
20.3、本实用新型设计的驱动结构的滑块在滑轨上滑动以消除导轨弯曲带来的偏移。
21.4、本实用新型设计的导向轮在过弯时反作用于摆臂支架,摆臂支架随着导轨弯曲进行摆动,使得过弯更加平稳。
22.5、本实用新型设计的下限位轮沿着导轨的底面滚动,避免行走机构在导轨上运动时出现上下晃动的现象。
23.本实用新型中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本实用新型的其他特征和优点将在随后的内容中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过文字以及附图中所特别指出的内容中来实现和获得。
附图说明
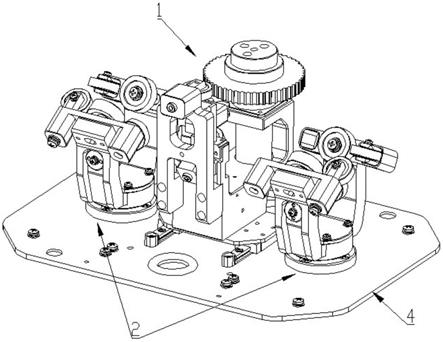
24.图1为本实用新型行走机构与导轨配合的一侧结构示意图;
25.图2为本实用新型行走机构与导轨配合的另一侧结构示意图;
26.图3为本实用新型行走机构的结构示意图;
27.图4为本实用新型行走机构的驱动结构的结构示意图;
28.图5为本实用新型行走机构的摆臂架的结构示意图;
29.图6为本实用新型行走结构与导轨配合的侧面正视图。
30.附图标记:
31.1-驱动结构;11-滑轨;12-滑块;13-连接板;14-驱动支架;141-第一驱动分支架;142-第二驱动分支架;15-电机;16-驱动齿轮;17-侧限位轮;18-上限位轮;19-取电装置;2-摆臂架结构;21-安装座;22-摆臂支架;221-第一摆臂分支架;222-第二摆臂分支架;23-下限位轮;24-挂轮;25-导向轮;3-导轨;31-齿条;32-底面;33-顶侧沿;34-上侧面;35-下侧面;4-移动板。
具体实施方式
32.下面结合附图来具体描述本实用新型的优选实施例。
33.实施例1
34.本实用新型的一个具体实施例,如图1-6所示,本实用新型实施例公开了一种防偏行走机构,尤其是一种导轨型巡检机器人的防偏行走机构,包括驱动结构1和至少一个摆臂架结构2,驱动结构1与摆臂架结构2均沿导轨3运动,驱动结构1为行走机构提供动力,摆臂架结构2为行走机构提供导向;驱动结构1自身可左右移动以及摆臂架结构2自身可左右旋转来抵消导轨3弯曲产生的位置偏移,共同限制行走机构的运行轨迹。
35.本实施例中,摆臂架结构2设置2个,驱动结构1设置在2个摆臂架结构2中间,使得行走机构的结构更加稳定;且设计的双摆臂架结构2与中间的驱动结构1共同限制行走机构的运动轨迹,行走机构在过弯时,驱动结构1自身可左右移动、摆臂架结构2自身可左右旋转来抵消因运动方向变化产生的位置偏移,使行走结构运行更加平稳顺畅。
36.如图4所示,驱动结构1从下向上依次设有2个滑轨11、2个滑块12、连接板13和驱动支架14;其中2个滑轨11固定在移动板4上,2个滑块12均设有滑槽,滑槽与滑轨11配合滑动;2个滑块12对称固定在连接板13的下表面,连接板13上表面与驱动支架14固定连接。
37.本实施例中,驱动结构1在导轨3上行走过程中,因导轨3弯曲会产生位置偏移,此时驱动结构1的滑块12在滑轨11上左右滑动,用以消除因运动方向变化产生的位置偏移。
38.可选地,2个滑轨11的两端均设有限位块,避免滑块12从滑轨11上滑出,增加驱动结构1的稳定性。
39.驱动支架14包括设置在导轨3两侧面的第一驱动分支架141、第二驱动分支架142,以及设置在导轨3下面的水平驱动分支架;水平驱动分支架支撑连接第一驱动分支架141、第二驱动分支架142,且水平驱动分支架分别与第一驱动分支架141、第二驱动分支架142垂直。具体地,水平驱动分支架分别与第一驱动分支架141、第二驱动分支架142可以为可拆卸连接或者一体成型。
40.第一驱动分支架141设有竖直通孔,驱动结构1还包括电机15和驱动齿轮16,电机15设置在竖直通孔底部,电机15的输出轴穿过竖直通孔;驱动齿轮16与在竖直通孔顶部的电机15的输出轴固定连接,电机15带动驱动齿轮16转动。
41.如图2所示,驱动齿轮16与导轨3的齿条31啮合,驱动齿轮16沿着齿条31运动。
42.驱动结构1还包括安装在第二驱动分支架142上的侧限位轮17、上限位轮18和取电装置19,其中,取电装置19在导轨3的带电铜片上滑动,带电铜片设置于导轨3上齿条31的相对面,取电装置19为电机15提供电能;侧限位轮17沿着导轨3的上侧面34滚动,上限位轮18沿着导轨3的顶侧沿33滚动,侧限位轮17与上限位轮18同时限制驱动结构1在导轨3上的运动轨迹,使驱动结构1运行更平稳。
43.具体地,第二驱动分支架142设有第一限位轮安装座、第一滑动安装杆,侧限位轮17设置在第一滑动安装杆一端,第一滑动安装杆的另一端滑动插接于第一限位轮安装座内,第一滑动安装杆与第一限位轮安装座之间设置第一弹性件,上限位轮18以同样的方式设置安装,则侧限位轮17、上限位轮18均具有一定的弹性,使驱动齿轮16紧贴齿条31,有效防止驱动齿轮16拖齿。
44.需要说明的是,侧限位轮17、上限位轮18由于自身弹性作用,能够消除直轨与弯轨之间的距离差。
45.如图5所示,摆臂架结构2包括安装座21和摆臂支架22,安装座21安装固定在移动板4上;摆臂支架22设置于安装座21的上方,摆臂支架22与安装座21可拆卸连接,摆臂支架22与安装座21转动连接,摆臂支架22可在导轨3弯曲时在安装座21上转动,以消除弯曲导轨段带来的位置偏移。
46.摆臂支架22包括设置在导轨3两侧的第一摆臂分支架221和第二摆臂分支架222,以及导轨3下面的水平摆臂分支架,第一摆臂分支架221、第二摆臂分支架222与水平摆臂分支架均为可拆卸连接;水平摆臂分支架与安装座21可拆卸连接,且可在安装座21上转动,并
带动第一摆臂分支架221、第二摆臂分支架222转动。
47.摆臂架结构2还包括下限位轮23、挂轮24和导向轮25,下限位轮23、挂轮24和导向轮25均对称安装在第一摆臂分支架221和第二摆臂分支架222上;第一摆臂分支架221和第二摆臂分支架222上均设有第二限位轮安装座、第二滑动安装杆,导向轮25设置在第二滑动安装杆一端,第二滑动安装杆的另一端滑动插接于第二限位轮安装座内,第二限位轮安装座、第二滑动安装杆之间设置第二弹性件,则导向轮25具有一定的弹性。
48.本实施例中,下限位轮23沿着导轨3的底面32滚动,避免行走机构在导轨3上运动时出现上下晃动的现象;挂轮24沿着导轨3的下侧面35滚动,下侧面35支撑挂轮24;导向轮25沿着导轨3的上侧面34滚动,导向轮25在过弯曲轨道时,其弹性反作用于摆臂支架22,摆臂支架22在安装座21上转动来消除因方向变化产生的位置偏移,使得过弯更加平稳。
49.本实用新型设计的双摆臂架结构与中间的驱动结构共同限制行走机构的运动轨迹,在过弯时,可以自身抵消偏移,使行走结构运行更加平稳顺畅;本实用新型设计的上限位轮、下限位轮、侧限位轮、挂轮、导向轮均限制行走机构的运动轨迹,增加了运行的稳定性。
50.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。