1.本发明属于风力发电技术领域,尤其涉及一种海上风电场的巡检机构及方法。
背景技术:
2.目前电动多旋翼无人机已经广泛应用于风电机组的巡检,但一般仍然由人工进行操作。无人机自动巡检在陆上风电机组得到了初步应用,但一般仍然一次只能自动巡检一台机组,巡检之前需要将无人机放置于机组前的地面上,自动巡检完成后人工更换电池,并前往下一个机位进行巡检。海上风电的无人机巡检一般从运维船甲板平台进行起降,稍有风浪便无法使用自动起降,只能采用人工起降,风浪较大时在运维船进行无人机起降和更换电池作业难度大,严重影响无人机巡检效率和作业安全;此外,由于船只出海受到出海窗口期限制,由于海洋潮位的变化一天中只有在特定的时间才能出海,否则只能等待下次窗口期才能出海进行无人机的巡检作业,因此海上风电迫切需要一种无人机增程巡检系统及方法,从而实现海上风电高效率巡检作业,有助于快速发现机组异常,减少故障损失。
技术实现要素:
3.本发明的目的在于提供一种海上风电场的巡检机构及方法,解决了现有技术中存在的上述不足。
4.为了达到上述目的,本发明采用的技术方案是:
5.本发明提供的一种海上风电场的巡检机构,包括用于向无人机提供起降平台的自动机库;所述自动机库设置在海上风电场升压站;
6.用于向无人机充电的增程起降充电平;所述增程起降充电平固定在风电机组的机舱顶部;
7.以及用于海上巡检的无人机,所述无人机与无人机巡检远程控制系统控制连接。
8.优选地,所述自动机库包括机库本体,所述机库本体为表面具有防腐蚀和防盐雾的立方体结构;
9.所述机库本体置于对称位置的两个侧面均开设有水平对开的机库门;
10.所述机库本体的内腔中设置有用于无人机起落的无人机起落平台,所述无人机起落平台上设置有用于对无人机进行充电的充电单元;
11.所述无人机起落平台连接有用于驱动无人机起落平台来回移动的第二驱动单元;
12.所述机库门连接有用于实现机库门自动开闭的第一驱动单元;所述第一驱动单元和第二驱动单元均与控制系统连接。
13.优选地,所述无人机起落平台设置有用于对无人机进行定位固定的推杆式无人机固定装置;所述推杆式无人机固定装置包括上层单元和下层单元,上层单元包为两根上层滑动固定杆(4)、上层推杆电机和上层固定杆滑轨(9),其中,所述两根上层滑动固定杆(4)滑动安装在上层固定杆滑轨(9)上;
14.所述上层推杆电机设置有两个,两个上层推杆电机分别与两根上层滑动固定杆
(4)驱动连接;
15.下层单元包括两根下层滑动固定杆(5)、下层推杆电机和下层固定杆滑轨(10),其中,两根下层滑动固定杆(5)滑动安装在下层固定杆滑轨(10)上;所述下层推杆电机与两根下层滑动固定杆(5)驱动连接;
16.所述下层推杆电机设置有两个,两个下层推杆电机分别与两根下层滑动固定杆(5)驱动连接。
17.优选地,两根上层滑动固定杆(4)布置在无人机起落平台上设置的无线充电面板为中心的两侧;
18.两根下层滑动固定杆(5)布置在无人机起落平台上设置的无线充电面板为中心的两侧;
19.所述下层滑动固定杆(5)的运动方向与上层滑动固定杆(4)的运动方向互相垂直。
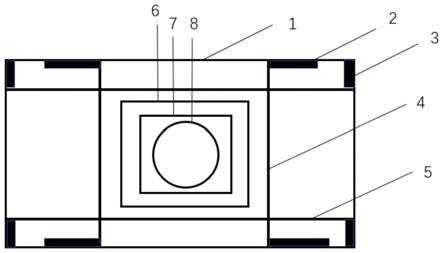
20.优选地,所述增程起降充电平上包括本体,所述本体上设置有无线充电面板,以及用于引导无人机降落的导航系统。
21.优选地,所述导航系统包括设置在本体上表面用于确定增程起降充电平位置信息的二维码,以及用于获取设定范围内无人机当前的位置信息和与增程起降充电平之间的距离的雷达监测单元,所述雷达监测单元同时用于将采集到的信息传输至无人机巡检远程控制系统。
22.一种所述装置的海上风电场的巡检方法,包括以下步骤:
23.步骤1,当满足无人机巡检要求时,将无人机从自动机库中推出;同时,向无人机下发巡检路线;
24.步骤2,开始巡检后,实时监测无人机剩余电量,根据剩余电量计算无人机的剩余飞行时间;并根据剩余飞行时间判断无人机是否需要增程充电;其中,当需要增程充电,则进入步骤3;否则继续执行飞行任务,直至任务结束;
25.步骤3,根据无人机的当前位置,选取最优的增程起降充电平台,并根据最优的增程起降充电平台获取无人机的最优飞行路径;
26.步骤4,根据最优飞行路径到达最优增程起降充电平台,完成无人机的充电工作,继续执行飞行任务,直至任务结束。
27.优选地,最优增程起降充电平台是指以无人机和目标巡检位置之间直线连接线的中间位置为中心点,以两点之间的距离为直径形成一个圆形区域,该圆形区域内所有增程起降充电平台中所需飞行时间最短的增程起降充电平台。
28.优选地,最优飞行路径的规划方法,具体包括以下步骤:
29.s1,设置直线飞行路径和绕行飞行路径;
30.s2,根据当前风向风速,采用枚举法或迪杰斯特拉算法计算两种飞行路径所需的飞行距离;进而得到飞行时间;
31.s3,将最短飞行时间对应的飞行路径作为最优飞行路径。
32.优选地,直线飞行路径具体是:
33.无人机直线上升超过叶片高度,之后直线飞行至增程起降充电平台的上方,最终直线降落增程起降充电平台上;
34.绕行飞行路径具体是:
35.保持无人机当前飞行高度,将无人机当前位置和目标点之间直线连接;在该直线连接上设置虚拟禁区;
36.在虚拟禁区的边缘处设置安全通过点;
37.在目标增程充电平台所在风电机组处,沿风电机组机舱方位角方向在机舱尾部向后3米位置处设定为目标点;
38.根据无人机当前位置、安全通过点和目标点之间的连线为无人机的绕行飞行路径。
39.和现有技术相比较,本发明具备如下优点:
40.通过本发明可以实现无人机在巡检海上风电场内的自动巡检和自动充电增程,避免了无人机巡检过程中需要降落来更换电池,提高了海上风电场无人机巡检的自动化水平和作业效率。
41.进一步的,本发明设计的巡检方法,能够快速实现对无人机进行充电,增大了无人机巡检增程,提高了巡检效率。
附图说明
42.图1是无人机巡检方法流程图;
43.图2是推杆式无人机固定装置的主视图;
44.图3是推杆式无人机固定装置的侧视图;
45.图4两侧机库门打开条件下的自动机库的主视图;
46.其中,1、无人机起落平台2、上传推杆电机3、下层推杆电机4、上层滑动固定杆5、下层滑动固定杆6、二维码7、无人机锁定区域8、充电单元9、上层固定杆滑轨10、下层固定杆滑轨11、无人机12、无人机起落架13、第二凹槽轨道14、第一凹槽轨道15、第一驱动单元16、第二驱动单元17、电池更换单元。
具体实施方式
47.下面结合附图,对本发明进一步详细说明。
48.本发明提供的系统一种海上风电场的巡检机构,包括:
49.用于向无人机提供起降平台的自动机库;
50.用于向无人机充电的增程起降充电平;以及用于海上巡检的无人机。
51.所述自动机库设置在海上风电场升压站上,具体地,所述自动机库包括机库本体,所述机库本体为表面具有防腐蚀和防盐雾的金属立方体结构。
52.所述机库本体置于对称位置的两个侧面均开设有水平对开的机库门。
53.所述机库门上的第一驱动单元15连接有控制系统。
54.每个机库门的内壁上均开设有第一凹槽轨道14,所述第一凹槽轨道14沿水平方向开设。
55.所述机库本体的内腔中设置有无人机起落平台1、、第二驱动单元16、充电单元8和电池更换单元17,其中,所述机库本体内腔中设置有第二凹槽轨道13,所述第二凹槽轨道13与第一凹槽轨道14对接连接,形成无人机起落平台1的滑行轨道。
56.所述无人机起落平台1与第二驱动单元16驱动连接,用于实现通过第二驱动单元
带动无人机起落平台1沿滑行轨道来回水平移动。
57.所述充电单元与无人机之间通过无线装置连接,用于向无人机充电。
58.所述充电单元为无线充电面板。
59.电池更换单元包括多自由度机械手和无人机备用电池,其中,所述多自由度机械手用于更换无人机的电池。
60.所述第二驱动单元与控制系统连接;所述控制系统与数据采集单元连接。
61.所述数据采集单元用于获取气象信息、无人机当前位置信息和距离,以及无人机起落信息。
62.所述无人机起落平台1包括本体,所述本体的中心位置处设置有用于无人机起落的无人机锁定区域7,所述无人机锁定区域7的正下方设置有无人机充电单元;所述无人机锁定区域7的上表面设置有用于提供机库本体位置信息的二维码。
63.所述本体的底部设置有滑轮;同时,所述本体与滑行轨道滑动连接。
64.所述本体上还设置有用于对无人机进行固定的推杆式无人机固定装置。
65.所述推杆式无人机固定装置包括上层单元和下层单元,上层单元包为两根上层滑动固定杆4、上层推杆电机和上层固定杆滑轨9,其中,所述两根上层滑动固定杆4滑动安装在上层固定杆滑轨9上;所述上层推杆电机设置有两个,两个上层推杆电机分别与两根上层滑动固定杆4驱动连接。
66.所述上层固定杆滑轨9安装在无人机起落平台的侧边处。
67.两根上层滑动固定杆4布置在无人机起落平台上设置的无线充电面板为中心的两侧。
68.下层单元包括两根下层滑动固定杆5、下层推杆电机和下层固定杆滑轨10,其中,两根下层滑动固定杆5滑动安装在下层固定杆滑轨10上;所述下层推杆电机与两根下层滑动固定杆5驱动连接。
69.所述下层推杆电机设置有两个,两个下层推杆电机分别与两根下层滑动固定杆5驱动连接。
70.所述下层固定杆滑轨10安装在无人机起落平台的剩余侧边处。
71.所述上层固定杆滑轨9和下层固定杆滑轨10形成框型结构。
72.两根下层滑动固定杆5布置在无人机起落平台上设置的无线充电面板为中心的两侧。
73.所述下层滑动固定杆5的运动方向与上层滑动固定杆4的运动方向互相垂直。
74.所述推杆式无人机固定装置的工作过程:
75.当无人机降落在起落平台后,无人机向自动机库的控制系统发送请求锁定信号,自动机库的控制系统启动推杆电机,进而通过上层滑动固定杆4和下层滑动固定杆5推动无人机的起落架,将无人机精确移动至指定位置并通过上层滑动固定杆4和下层滑动固定杆5将无人机起落架进行固定。
76.自动机库的工作过程:
77.当无人机需要降落停机时,通过导航系统获取自动机库的位置信息和距离;同时通过无线通信系统向自动机库的数据采集单元实时传输当前自身的位置信息和距离;
78.控制系统根据接收到的无人机当前位置信息和距离,控制第一驱动单元15的启
停,进而实现自动机库门的开闭;
79.当自动机库门打开时,控制系统控制第二驱动单元的启停,进而带动无人机起落平台移动至自动机库外侧,便于无人机的降落。
80.当无人机需要起飞作业时,风电场运行人员对控制系统下达巡检指令,控制系统通过数据采集单元获取气象信息,根据气象信息选取处于背风处的自动机库门,进而控制第一驱动单元的启停,进而实现该处于背风处的自动机库门的开闭;
81.当自动机库门打开时,控制系统控制第二驱动单元的启停,进而带动无人机起落平台移动至自动机库外侧,便于无人机的起飞。
82.所述增程起降充电平台通过螺栓固定在风电机组的机舱顶部,尺寸为2m*2m。
83.所述增程起降充电平台的上表面喷涂有预设的二维码,二维码内包含授权信息包括但不限于但不限于起降平台的物理尺寸、充电面板的中心位置、授权降落和机组数据获取密码、无人机降落后的动作。二维码信息数据库储存在巡检控制系统后台服务器端。
84.所述增程起降充电平台的上表面还设置有用于对无人机进行固定的推杆式无人机固定装置。
85.所述增程起降充电平台上还设置有无线充电面板,所述无线充电面板置于机械推杆固定装置的下方,用于通过无线充电方式对无人机进行增程充电。
86.所述增程起降充电平台由风电机组内电源供电。
87.所述无人机巡检远程控制系统还连接有机组控制系统,用于从机组控制系统中,获取机组所在位置的风速风向、机组运行状态、机舱方位角和叶轮位置。
88.所述无人机巡检控制系统用于根据接收到的机组所在位置和机舱方位角,控制无人机沿机舱中轴线方向从机舱后部飞入增程起降充电平台上方;并根据下视系统采集和识别的平台二维码确定平台位置,并和机组控制系统建立连接,实时获取机组所在位置的风速风向、塔筒轴向和纵向倾角、机舱轴向和纵向加速度数据。
89.同时,无人机根据增程起降充电平台的实际位置、塔筒倾角、机组轴向和径向加速度,计算增程平台的移动轨迹,并结合平台二维码识别和激光雷达测距,在机舱轴向和纵向加速度数据在安全范围内时,引导无人机降落。
90.移动轨迹计算方法为:根据塔筒在轴向和纵向倾角数据x和y,计算塔顶的转角将转角代入r=hsin(θ)即可获得增程平台位移数据,h为倾角传感器的安装高度。
91.所述电动多旋翼无人机上设置有具备云台,用于对无人机相机拍摄增稳。
92.所述无人机搭载有由下视摄像头、计算单元、激光雷达构成的下视觉系统,用于捕捉增程起降充电平的二维码图像,以及与增程起降充电平之间的距离;用以辅助降落,无人机具有无线天线可与起降平台进行通讯,无人机具有无线充电模块能够通过充电面板对无人机携带的电池进行无线充电。
93.所述增程起降充电平台通过螺栓可靠固定在机舱顶部空旷处,平台上表面喷涂预设二维码用于辅助无人机降落,平台表面设置机械推杆固定装置,在无人机降落后利用上下两套推杆系统推动无人机起落架,将无人机精确移动至指定位置并固定无人机起落架,推杆固定装置下方设置无线充电面板,通过无线充电方式对无人机进行增程充电,平台设
置高清摄像头用于监视无人机起降和锁定充电情况,设有无线天线用于和无人机进行通讯和数据传输,平台由风电机组内电源供电。
94.通过风电机组内有线网络连接至机组控制系统及无人机巡检远程控制系统。当无人机进入天线信号范围时,通过无线方式和无人机建立通讯连接,将机组所在位置的风速风向、机组运行状态、机舱方位角、叶轮位置、机舱轴向和纵向加速度等实时数据传送至无人机巡检远程控制系统,无人机根据机组经纬度位置和机舱方位角,控制无人机沿机舱中轴线方向从机舱后部飞入增程起降充电平台上方,根据下视系统采集和识别的平台二维码确定平台位置,并和机组控制系统建立连接,实时获取机组所在位置的风速风向、机组塔筒倾角、机舱轴向和纵向加速度数据。
95.无人机降落后,平台上的物理锁定装置通过上下交错的两套滑动固定杆和推动系统将无人机推至指定位置并进行可靠锁定,使得无人机无线充电面板和平台的无线充电区域准确对齐,无线充电效率达到最大。
96.海上升压站自动机库通过螺栓可靠固定与升压站空旷处,尺寸为2m*2m*1.2m,机库内由220v交流电源供电,通过无线方式对无人机进行充电,通过机械臂对无人机进行更换电池,机舱通过有线网络连接至中控及远程系统,机舱内包含无线网络覆盖、无人机无线充电面板、用于更换无人机电池的多自由度机械手、可充电的无人机备用电池、可推出机库的无人机起落平台和推杆式无人机固定装置、机舱消防灭火装置。在机库外设置通讯天线和自动气象站。
97.本发明提供的一种电动多旋翼无人机在海上风电场的增程巡检方法,包括以下步骤:
98.步骤1:
99.通过网络远程控制自动机库中的无人机进行自检,判断无人机是否正常,能够满足起飞作业需求,如未通过自检则进行报警;
100.步骤2:根据风电场内天气预测数据和机库气象站数据判定是否满足正常巡检作业条件,若满足,启动自动巡检程序,根据机库气象站的5分钟平均风向数据,如满足巡检作业的气象条件,选择背风向一侧的自动机库门开启,将无人机起降平台水平推出机库,通过推杆电机装置控制上下两层的横向和纵向滑动固定杆分别向两侧滑动,无人机起落架的物理锁定随之取消,无人机起飞,根据巡检任务规划增程充电位置以及巡检路线。
101.步骤3:
102.无人机飞行至目标机组巡检范围内,巡检系统将机组停机指令发至风电机组,同时获得机组的叶轮方位角以及机组三只叶片的位置。
103.步骤4:
104.控制无人机悬停于轮毂前方的指定距离处位置,通过无人机拍摄的图像,通过图像分析和机器学习算法智能识别出叶轮方位角,获得每只叶片的位置角度;和机组提供的叶片位置进行对比,当两者一致时进行三只叶片的巡检路径规划,当两者不一致时报警,放弃当前机组的巡检任务。
105.步骤5:
106.所述无人机按规划好的叶片巡检路径自动巡检每只叶片的前缘、后缘、迎风面、背风面并进行拍摄。
107.步骤6:
108.无人机监测剩余电量,当剩余电量对应的飞行时间高于计算得到的正常巡检预设飞行时间时,无人机前往下一目标机组重复步骤3和步骤4;当剩余飞行时间低于计算得到的正常巡检预设飞行时间时,控制无人机前往最优的起降平台进行增程充电,充电完成后继续执行预定巡检任务,当无人机剩余电量经过计算后不足够前往起降平台时,控制无人机根据提前制定的安全路径在应急点降落。
109.路径规划方法为:
110.首先以无人机和目标巡检位置的直线连接线的中间位置为中心点,以两点之间的距离为直径形成一个圆形区域,包括在圆形区域中的增程充电平台视为可选的目标增程充电平台。
111.无人机在前往指定充电平台的位置有两种方式:
112.第一种直线上升超过叶片高度,然后直线移动至充电平台上方,在直线降落至充电平台位置。
113.第二种方式是无人机不进行上升操作,保持现有高度飞行至增程起降充电平台,飞行路径需要避开风电机组范围。根据风电机组的机舱方位角,在无人机高度设置一长方体方体的虚拟禁区,长度为叶轮直径的安全裕量,宽度为机舱长度的安全裕量。目标增程充电平台所在的机组沿风电机组机舱方位角方向在机舱尾部向后3米位置处设定为目标点,无人机在到达该目标点后沿机舱方位角方向从机舱后部进入增程起降充电平台上方并进行降落。
114.直线连接无人机位置和目标点穿过的禁区为需要规避的飞行路径,在禁区两侧边缘位置设置两处安全通过点,无人机的飞行路径需通过安全通过点后前往目标点。如果连接无人机位置和安全通过点仍然需要穿过禁区,则再次在需穿越禁区的两侧边缘位置设置两处安全通过点,直至从无人机位置开始经过一个或数个安全通过点能够连接至目标点。无人机、各安全通过点以及目标点之间的距离采用将各点的经纬度坐标结合haversine formula方法计算得到。
115.无人机巡检控制系统通过根据实时风向风速数据,采用枚举法或迪杰斯特拉(dijkstra)算法计算无人机通过增程充电平台充电后到达巡检目标的不同路径的飞行距离,通过风速在无人机飞行路径上的矢量分解获得无人机在路径上的飞行速度,用飞行距离除以飞行速度得到飞行时间,选择无人机通过增程充电平台充电后到达巡检目标飞行时间最短的路径为最优飞行路径。
116.步骤7:
117.控制无人机飞行至规划的具有充电平台的风电机组机舱上方,无人机启动下视觉辅助降落系统,追踪起降平台中心的二维码,降落在起降平台中心,起降平台对无人机进行可靠锁定并进行充电。
118.步骤8:在增程充电完成后,从风电机组顶部的起降平台起飞,沿机舱中轴线方向背向机组叶片飞行出叶片安全距离后,继续根据预设路线进行巡检作业。
119.步骤9:在完成预设巡检线路后,无人机返回升压站自动机库上方,控制自动机舱门打开,无人机降落进行充电,同时将采集的巡检视频无线传输至视频分析系统,视频智能分析系统对图像进行自动分析,给出识别结果,结束巡检任务。