1.本发明涉及机器人技术领域,尤其涉及一种具有高自由度机械臂的水下捕捞机器人。
背景技术:
2.海洋是生命的起源之地,其中不仅蕴藏着丰富的自然资源,还有许多不为人知的美丽光景。海洋的面积占地球总面积的三分之二以上,具有极大的探索价值和开发潜力。但由于人类自身条件所限,无法在海洋中自由活动。在海参养殖产业中,海参捕捞员便存在着技术要求高,工作辛苦,且有不可避免的关节炎等职业病的问题,尽管收入很高,但越来越少的人愿意投入到这项工作中。水下航行器的出现很好的解决了这一矛盾。水下航行器一般分为载人水下航行器(muv)和无人水下航行器(uuv),无人水下航行器又可以分为遥控水下机器人(rov)和自主水下机器人(auv)。遥控水下机器人具有动力充足,运动灵活,作业效率高等优点,可以广泛的应用于海参捕捞产业。
3.现有水下捕捞机器人主要有单自由度机械臂式和管道吸取式。单自由度机械臂式水下捕捞机器人体积和质量较小,在水下的运动相对而言更加灵活,单自由度机械臂捕捞效率高,但其在海洋中受水流影响大,难以满足较深水域作业要求,且单自由度机械臂只能在平整海床上进行捕捞作业,同时受到机器人本身体积限制,其能够携带的海产品数量较少,影响整体作业效率。管道吸取式水下捕捞机器人体积和质量较大,运动灵活性相对较低,受水流影响较小,可在较深海域进行水下捕捞作业,通过管道对海床上的海产品进行吸取,工作效率极高,但是极易对海床造成不可逆的破坏。同时,单自由度机械臂式和管道吸取式水下捕捞机器人都难以针对易损伤的海产品进行精细化捕捞,很有可能在捕捞过程中造成海产品破损,从而降低其价值。
技术实现要素:
4.本发明主要解决现有技术的水下捕捞机器人应用受限制、不能在保护海床的同时完成精细捕捞的技术问题,提出一种具有高自由度机械臂的水下捕捞机器人,该水下捕捞机器人结构合理、使用方便、适应能力强、应用范围广、稳定性好。
5.本发明提供了一种具有高自由度机械臂的水下捕捞机器人,包括:机器人主体、抓取机构、驱动机构和控制器;
6.所述机器人主体包括:上舱、下舱和主体框架,上舱和下舱之间通过主体框架进行连接;
7.所述抓取机构安装在机器人主体前端右侧,所述抓取机构包括:第一舵机、第二舵机、第三舵机、第四舵机、第五舵机、第六舵机、第一支臂、第二支臂、第三支臂、机械爪、支撑板和主体固定板;第一舵机的输出轴上套设第一传动齿轮,第一传动齿轮和第一从动齿轮啮合,第一从动齿轮与支撑板连接;支撑板与第一支臂通过第二主动传动齿轮和第二从动齿轮连接;第一支臂与第二支臂通过第三舵机连接;第二支臂与第三支臂通过第四舵机连
接;机械爪与第三支臂通过第五舵机连接;所述主体固定板固定在第一舵机上;所述抓取机构通过主体固定板与主体框架连接;
8.所述驱动机构包括:四组水平面推进器以及四组垂直面推进器;四组水平面推进器在下舱的四周呈环形分布;四组垂直面推进器在上舱的两侧两两对称分布;
9.所述水平面推进器和垂直面推进器,分别包括:推进器电机、螺旋桨、螺旋桨保护罩、推进器底座;所述推进器电机的电机主动轴与螺旋桨连接;螺旋桨保护罩、推进器电机和推进器底座连接;所述推进器底座连接在主体框架上;
10.所述控制器包括:控制箱、控制臂和零浮力线缆,所述控制箱通过零浮力线缆与机器人上舱连接。
11.优选的,所述主体框架包括:第一侧板、第二侧板、第一中间板、第二中间板、第一推进器固定板、第二推进器固定板、第三推进器固定板、第四推进器固定板、前连接板和后连接板;
12.所述前连接板、后连接板、第一中间板和第二中间板两端分别通过角件与第一侧板和第二侧板连接;所述第一推进器固定板、第二推进器固定板、第三推进器固定板和第四推进器固定板分别通过角件与第一侧板、第二侧板、第一中间板和第二中间板连接。
13.优选的,所述上舱和下舱之间通过主体框架中的第一中间板和第二中间板进行连接;
14.所述上舱和下舱两端均设置有舱板和舱体固定板,所述舱板和舱体之间依靠橡胶密封圈和密封脂填充进行紧固连接;
15.所述上舱和下舱与第一中间板、第二中间板通过舱体固定板进行连接,所述舱体固定板通过螺丝紧固连接在上舱和下舱之上并固定在第一中间板和第二中间板内侧。
16.优选的,还包括:设置在机器人主体四周的检测机构;
17.所述检测机构包括:姿态传感器、照明机构、摄图像采集机构和深度传感器,所述姿态传感器、所述照明机构、所述图像采集机构和所述深度传感器分别与控制器电连接;
18.所述图像采集机构包括:前置摄像头、后置摄像头、左侧摄像头、右侧摄像头;
19.所述照明机构包括:前置探照灯、后置探照灯、左侧探照灯和右侧探照灯,分别与相同侧面的摄像头相邻;
20.所述姿态传感器通过环氧树脂密封,固定在上舱上方;所述深度传感器固定在上舱后端仓舱板上。
21.优选的,所述推进器电机为直流无刷电机。
22.优选的,所述控制器通过通讯接口与外部的控制计算机电连接。
23.本发明提供的一种具有高自由度机械臂的水下捕捞机器人,包括机器人主体、抓取机构、驱动机构、检测机构和控制器,可以完成水下机器人的水下运动,并配合高自由度的机械臂,可以较好地适应复杂海底环境并完成复杂海底环境中的海产品捕捞工作。机器人整体体积和质量较大,可承受较大的水流冲击,可适应较深海域捕捞作业。机器人主体框架采用结构优化后的铝合金板,可以满足100米深海水环境中的强调要求,在保证强度和稳定性的同时尽可能减少了在水流中的受力面积,可以在更深的海域中保证稳定作业。抓取机构设计为一条五自由度的机械臂,可以针对复杂海底环境对海产品进行更加精确的捕捞作业。驱动机构有水平方向四个推进器和垂直方向四个推进器组成,可以为机器人提供强
大运动能力并稳定完成六个自由度的运动。检测机构带有多种传感器,可以对机器人四个方向的环境进行实时检测,能够检测机器人在水流中的实际运动方向和所处深度。本发明的具有高自由度机械臂的水下捕捞机器人能够在复杂海底环境中保持良好的运行,能够在适应复杂海底环境的同时完成针对海产品的高精度捕捞,显著提高海产品捕捞效率,不易造成海产品损伤,不易对海床产生破坏,较大的体积和质量保证机器人在较深的海域也可稳定作业,通过控制器可进行远程控制实现灵活的运动,可完成针对复杂海底环境中的高效率海产品捕捞作业。
附图说明
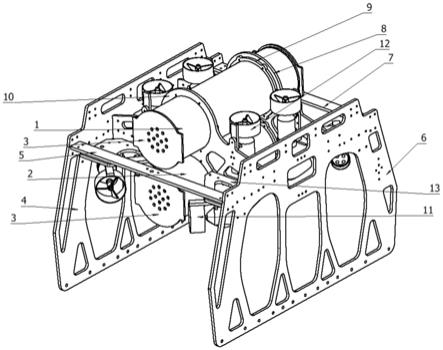
24.图1是本发明提供的具有高自由度机械臂的水下捕捞机器人主体的立体图;
25.图2是本发明提供的具有高自由度机械臂的水下捕捞机器人主体的主体图;
26.图3是本发明提供的具有高自由度机械臂的水下捕捞机器人抓取机构的立体图;
27.图4是本发明提供的具有高自由度机械臂的水下捕捞机器人抓取机构的主体图;
28.图5是本发明提供的具有高自由度机械臂的水下捕捞机器人推进器的立体图;
29.图6是本发明提供的具有高自由度机械臂的水下捕捞机器人推进器的主体图。
30.附图中各附图标记指代的技术特征:
31.1、上舱;2、下舱;3、舱板;4、第一侧板;5、后连接板;6、第二侧板;7、前连接板;8、第一中间板;9、舱体固定板;10、第二中间板;11、水平面推进器;12、垂直面推进器;13、推进器固定板;14、第一舵机;15、第二舵机;16、第三舵机;17、第四舵机;18、第五舵机;19、第六舵机;20、第一支臂;21、第二支臂;22、第三支臂;23、机械爪;24、支撑板;25、第一从动齿轮;26、第二传动齿轮;27、第二从动齿轮;28、第一传动齿轮;29、推进器电机;30、螺旋桨;31、螺旋桨保护罩;32、电机主动轴;33、推进器底座。
具体实施方式
32.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
33.如图1-2所示,本发明实施例提供的具有高自由度机械臂的水下捕捞机器人,包括:机器人主体、抓取机构、驱动机构和控制器。
34.所述机器人主体包括:上舱1、下舱2和主体框架,上舱1和下舱2之间通过主体框架进行连接。
35.所述主体框架包括:第一侧板4、第二侧板6、第一中间板8、第二中间板10、第一推进器固定板13、第二推进器固定板、第三推进器固定板、第四推进器固定板、前连接板7和后连接板5;所述前连接板7、后连接板5、第一中间板8和第二中间板10两端分别通过角件与第一侧板4和第二侧板6连接;所述第一推进器固定板13、第二推进器固定板、第三推进器固定板和第四推进器固定板分别通过角件与第一侧板4、第二侧板6、第一中间板8和第二中间板10连接。所述主体框架选取8mm厚度6061铝合金材质,各个部件之间通过不锈钢角码连接,上部预留提手以方便搬运;所述主体框架各个组成部件可设置通孔,可采用拓扑优化方法
确定挖孔的形式,在保证原有强度的前提下尽可能减小框架面积,增加了所述机器人主体对于水流的通过性,减少了所述机器人主体受到的水流的冲击力,使得所述水下捕捞机器人可在较深海域保持稳定捕捞作业。
36.具体的,所述上舱1和下舱2之间通过主体框架中的第一中间板8和第二中间10板进行连接。所述上舱1和下舱2两端均设置有舱板3和舱体固定板9,所述舱板3和舱体之间依靠橡胶密封圈和密封脂填充进行紧固连接;所述上舱1和下舱2与第一中间板8、第二中间板10通过舱体固定板9进行连接,所述舱体固定板9通过螺丝紧固连接在上舱1和下舱2之上并固定在第一中间板8和第二中间板10内侧。
37.所述上舱1主要用于控制与通信,上舱1作为工控机间,上舱1内设置第一控制机构;所述第一控制机构包括:第一微型计算机、第一单片机、第一供电电源模块,第一照明灯电源,第一水压传感器,第一姿态传感器,第一温湿度传感器,第一进水检测电路;第一单片机采用stm32f407单片机,第一单片机通过usb转ttl串口模块与第一微型计算机进行通信用于控制数据传输,通过st-link下载器与第一微型计算机进行通信用于固件升级,通过模拟信号来控制第一照明灯电源的恒流输出值,来控制舱外照明机构的亮度,通过pwm信号控制上舱1外舵机的角度,,并通过iic读取位于舱体后端盖上的第一水压传感器ms5837-30ba以获得机器人当前的深度和外界水温,通过串口读取第一姿态传感器wt931以获得机器人当前的航向角、俯仰角、横滚角,通过iic读取第一温湿度传感器sht30采集上舱1内的温度与湿度,通过模拟信号读取第一进水检测电路检测上舱1是否进水,并将这些数据发送给第一微型计算机。所述进水检测电路,由电极式水浸传感器与分压电阻组成,电极式水浸传感器具有结构简单、易于安装、价格低廉等优点,电极式水浸传感器安装于舱内底部,当舱内进水时,传感器两电极间被水浸湿电阻减小,输出端电压降低,单片机即可通过输出端模拟电压的改变,获得进水信息。
38.所述下舱2主要用于推进器驱动,下舱2内设置第二控制机构;所述第二控制机构包括:第二单片机、第一usb集线器、第二供电电源模块、第一电调、第一电压电流采集电路,第一能量吸收电路,第二温湿度传感器,第二进水检测电路;第二单片机采用stm32f407单片机,第二单片机作为第二控制机构的主控制装置,通过usb转ttl串口模块和st-link下载器与第一usb集线器连接,第一usb集线器使用usb电缆与上舱1的第一微型计算机连接。第二单片机接收第一控制机构发送来的每个推进器转速的目标值,同时通过第一电调采集每个推进器转速的当前值,经过pid算法计算得到每个推进器接下来应采用的油门大小,由pwm的方式输出给电调,形成推进器转速的闭环控制,使得推进器的转速能够稳定在目标转速;通过iic读取第二温湿度传感器sht30采集下舱2内的温度与湿度,通过模拟信号读取第二进水检测电路检测下舱2是否进水,通过iic读取第一电压电流采集电路获取第一电调的供电电压与消耗的电流。所述第一电压电流采集电路采用ads1115芯片,通过0.375mω的采样电阻电流值,通过分压电阻采集电压值。第二单片机将以上信息返回给上舱第一微型计算机以进行汇总处理;所述下舱2内部设置的第一能量吸收电路,是为了防止推进器电机在正反转迅速切换时产生的较高的电动势损坏电源,使用电容吸收推进器电机的转动动能,抑制电源电压的提高,采用30个35v10000μf的铝电解电容并联的方式,以减小内阻和提高瞬间能量吸收能力。
39.如图3-4所示,所述抓取机构安装在机器人主体前端右侧,所述抓取机构包括:第
一舵机14、第二舵机15、第三舵机16、第四舵机17、第五舵机18、第六舵机19、第一支臂20、第二支臂21、第三支臂22、机械爪23、支撑板24和主体固定板;第一舵机14的输出轴上套设第一传动齿轮28,第一传动齿轮28和第一从动齿轮25啮合,第一从动齿轮25与支撑板24连接;支撑板24与第一支臂20通过第二主动传动齿轮26和第二从动齿轮27连接;第一支臂20与第二支臂21通过第三舵机16连接;第二支臂21与第三支臂22通过第四舵机17连接;机械爪23与第三支臂22通过第五舵机18连接;所述主体固定板固定在第一舵机14上;所述抓取机构通过主体固定板与主体框架连接;
40.本实施例的抓取机构,机械臂主体设计为坐标式机械臂,具有良好的避障性,能够应对水下复杂环境,在保证海产品完整不破损的前提下完成精准高效捕捞;所述抓取机构的机械臂主要采用铝合金作为支架,关节处使用防水舵机d30控制角度,在机械臂上挖孔以减轻重量和减小水流阻力;所述抓取机构机械爪23采用铝合金爪体,通过防水舵机d30控制开合角度,在爪体上下增加弹性挡条,以防止抓取物掉落,同时弹性材质可以防止破坏抓取物。
41.所述驱动机构包括:四组水平面推进器11以及四组垂直面推进器12;四组水平面推进器在下舱2的四周呈环形分布;四组垂直面推进器12在上舱1的两侧两两对称分布;
42.如图5-6所示,所述水平面推进器和垂直面推进器,分别包括:推进器电机29、螺旋桨30、螺旋桨保护罩31、推进器底座33;所述推进器电机29的电机主动轴32与螺旋桨30连接;螺旋桨保护罩31、推进器电机29和推进器底座33连接;所述推进器底座33连接在主体框架上。推进器电机29为直流无刷电机。
43.在本实施例中,驱动机构包括八组推进器,通过不同推进器的不同推力组合,可使水下捕捞机器人拥有六个运动的自由度,包括横荡、纵荡、垂荡、横摇、纵摇、艏摇;推进器电机29通过将无刷电机密封在外壳中的方式防止其与海水直接接触,可在浑浊海水中长时间工作,电机主动轴32与螺旋桨保护罩31之间通过三个骨架油封串联的方式进行防水密封处理;推进器的螺旋桨30和螺旋桨保护罩31位置可通过实验方法进行优化,在保证强渡和机构互不干涉的前提下提高了推进器的工作效率,单组推进器可提供120n的推进力。
44.本发明实施例的水下捕捞机器人,还包括:设置在机器人主体四周的检测机构;所述检测机构包括:姿态传感器、照明机构、摄图像采集机构和深度传感器,所述姿态传感器、所述照明机构、所述图像采集机构和所述深度传感器分别与控制器电连接;所述图像采集机构包括:前置摄像头、后置摄像头、左侧摄像头、右侧摄像头;所述照明机构包括:前置探照灯、后置探照灯、左侧探照灯和右侧探照灯,分别与相同侧面的摄像头相邻;所述姿态传感器通过环氧树脂密封,固定在上舱1上方;所述深度传感器固定在上舱1后端仓舱板上。
45.在本实施例中,所述图像采集机构为操作手提供实时图像信息,前置摄像头为单自由度双目摄像头,可做俯仰运动,以获得更大的视野范围,使用双目摄像头可为以后扩展双目视觉定位,自动识别海参、海胆、海星等海产品,实现自动化捕捞预留好硬件支持。机器人左侧、右侧、后方分别搭载一固定单目摄像头,用于环境的观察,寻找海产品与避障。摄像头采用亚克力透明盒,对镜头接缝处使用硅橡胶密封后灌封环氧树脂,以使得其可以浸没在海水中并正常工作;所述照明机构采用10w led集成灯珠作为每个摄像头的辅助光源,位于摄像头边。灯珠涂抹导热硅脂后,贴散热片,并置于透明亚克力盒子中,使用透明环氧树脂灌封。
46.所述控制器包括:控制箱、控制臂和零浮力线缆,所述控制箱通过零浮力线缆与机器人上舱1连接,起到远程遥控机器人的作用。所述控制器通过通讯接口与外部的控制计算机电连接。零浮力线缆与机器人上舱1连接部分使用不锈钢钢缆进行加固。所述控制箱通过零浮力线缆为机器人供电,由于电缆被海水包裹,存在寄生电容,故交流输电方式存在较大的损耗,因此采用直流输电的方式,提高电压可以减小电流,以减小输电电缆上的损耗,故采用将220v市电整流成311v直流电的方式为机器人供电;所述控制箱采用一个32a漏电保护开关作为总开关,由于滤波电容容量较大,开关合闸时会有很大的冲击电流,为减小启动电流,采用串联一个10ω的电阻的方式启动,并通过时间继电器在启动后将自动将电阻短路,220v的市电通过kbpc5010整流桥及电容滤波后成为311v直流电源,并通过一个空气开关控制机器人的供电;所述控制臂是通过一个等比例缩小模型对抓取机构机械臂进行模拟控制,将各关节处的舵机换成电位器,由第三单片机通过adc采集各电位器的输出电压并换算成关节角度,通过串口发送给控制箱单片机,由控制箱第四单片机汇总发送给控制箱微型电脑再转发给机器人;所述控制箱通过两个自复位二维摇杆控制机器人的运动,获得机器人六自由度运动状态的目标值,一个摇杆提供前进后退、左右平移这两个自由度,另一个摇杆提供上升下降、左右旋转这两个自由度,左右摇摆、前后俯仰这两个自由度的目标值恒为零,前进后退、左右平移、上升下降这三个自由度的反馈值由第二单片机通过第一电调采集的推进器转速提供,左右旋转、左右摇摆、前后俯仰这三个自由度的反馈值由第一姿态传感器提供,通过运动的矢量合成与pid算法,计算得到8个推进器每个的转速目标值。通过一个摇杆控制前视摄像头的俯仰;通过旋钮控制机器人最大功率、舱外照明系统亮度、旋转灵敏度;通过开关控制机械臂电源是否通电、是否开启纵摇横摇闭环控制、是否开启艏摇闭环控制;以上信息通过第四单片机采集,预留两路机械臂控制单元串口,机械臂控制单元将机械臂各关节信息通过串口发送给第四单片机,第四单片机汇总所有信息显示在一个3.2寸tft显示屏上方便观察调试,并发送给控制箱微型电脑,由微型电脑通过网络发送给机器人;通过一个22寸显示屏连接控制箱微型电脑,微型电脑运行windows 10系统,并通过python调用机器人各摄像图图像并显示在显示屏上。
47.本发明的水下捕捞机器人的工作原理如下:操作人员通过控制器控制具有高自由度机械臂的水下捕捞机器人,机器人根据指令完成横荡、纵荡、垂荡、横摇、纵摇、艏摇、抓取机构运动和检测机构信息采集与显示。具有高自由度机械臂的水下捕捞机器人通过串口与控制器通信,操作人员通过对控制箱进行相关操作,向水下捕捞机器人发送相关控制指令,水下捕捞机器人上舱1接收相关指令并将其解算成为控制信号,是相关推进器和舵机按照指令进行运动,从而起到控制水下捕捞机器人运动的目的。具有高自由度机械臂的水下捕捞机器人共有八组推进器,在水平面和垂直面上分别配有四组,可以让机器人完成六个自由度的运动。水下捕捞机器人的检测机构在采集信息是,由控制器向上舱发送信息采集指令,上舱1接收相应指令后开始采集各个传感器信息并上传至控制器,通过控制器的显示屏进行图形化显示,为操作人员提供实时、直观、准确的图像、深度、运动方向信息,实现海产品捕捞。
48.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替
换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。