1.本发明属于水下机器人技术领域,具体涉及一种可浮游或行走的水下桥墩和导管架检测清洗机器人。
背景技术:
2.随着海洋经济和海洋工程的飞速发展,海上桥梁和导管架等重大工程与日俱增。由于桥梁的桥墩和导管架等,长时间受到海水的腐蚀、冲刷和海洋生物附着等因素的影响,会加快钢结构的腐蚀,这些都会给会对桥梁或导管架等平台的寿命和承载能力造成较大的影响。
3.目前水下桥墩和导管架的检测与清洗主要是由潜水员完成,而潜水员的作业深度和时间受限,作业风险高。尤其是平台附近的海流、旋涡和高压水枪作业,更进一步地增加了潜水员的生命危险。水下机器人在水下桥墩、导管架等海洋平台的检测和清洗作业方面具有广阔的前景。然而常规的作业和观测级rov一般依靠动力在水下浮游作业,难以对以上平台的复杂表面进行抵近可靠检测。
4.专利文献“曲面自适应水下爬壁机器人(cn 111572725 a)”虽然通过摆臂机构实现机器人对曲面的适应能力,但是其采用磁吸附的方式,使其作业的范围有限,不能实现对非导磁体水下结构的检测,同时其携带的作业工具不具备对狭缝等部位的精度作业。“自适应爬壁机器人(cn 112960046 a)”也同样通过摆动机构实现机器人对曲面的适应能力,但是机器人缺少能够精确作业的工具,且机器人整体的承重能力差,不支持水下作业。
技术实现要素:
5.本发明的目的在于提供一种可浮游或行走的水下桥墩和导管架检测清洗机器人。
6.一种可浮游或行走的水下桥墩和导管架检测清洗机器人,包括机器人框架、控制舱和电池舱、行走轮式机构、推进系统、清洗作业机构;所述控制舱和电池舱安装在机器人框架上;所述机器人框架的前部左右两侧下端、后部左右两侧下端各布置有一组所述行走轮式机构;所述行走轮式机构包括行动轮、行动轮驱动电机、摆动机构和转动机构;所述清洗作业机构安装在机器人框架的前方;
7.所述行动轮与行动轮驱动电机连接;所述摆动机构包括l型连杆、铰接座;所述转动机构包括转动驱动电机;所述转动驱动电机安装在机器人框架上;所述铰接座与l型连杆一端刚性连接,l型连杆另一端通过转轴与转动驱动电机连接;所述行动轮驱动电机通过铰接轴与铰接座连接;所述铰接座带有延伸的钢板,用于使行动轮能够与铰接座具有一定的距离,使行动轮能够大幅度的摆动;
8.机器人首先通过摆动机构使机器人的行动轮表面与工作的壁面垂直贴合,完成对曲面的适应;当机器人到达工作桥墩或者导管架尽头,需要水平方向进行圆周运动清理作业时,摆动机构回到原位,通过转动机构使机器人前方的两个行动轮逆时针转动90
°
,后方的两个行动轮顺时针转动90
°
,这时机器人的主体维持垂直方向且仍然可以保持良好的稳
定性,通过行动轮驱动电机使机器人能够完成圆周运动的检测。
9.进一步地,还包括运动感知系统;所述运动感知系统包括安装在控制舱和电池舱内的磁罗经和深度计、安装在机器人框架上的多普勒测速仪;所述运动感知系统用于对机器人的位姿和运动速度进行反馈,从而完成对机器人的位置姿态调节,使机器人能够稳定在壁面工作。
10.进一步地,还包括视觉感知系统;所述视觉感知系统包括安装在机器人前方的水下双目视觉系统、水下照明灯、单目彩色水下摄像机、激光测距仪;所述单目彩色水下摄像机用于拍摄记录提供实时画面;所述水下双目视觉系统用于对检测目标的识别和测量;所述水下照明灯用于水下光线不足情况下提供照明。
11.进一步地,所述清洗作业机构包括水下作业机械臂;所述水下作业机械臂的肩部包括俯仰关节和摆动关节,肘部包括俯仰关节,手腕包括摆动关节,各个关节都采用的封闭结构的形式;所述水下作业机械臂的前端设有高压水枪,用于对需要清理部位的准确清理。
12.进一步地,所述推进系统包括安装在机器人框架上的两个水平推进器和垂直机器人外壳安装的四个垂直推进器,各推进器均可通过控制系统完成对转向和转速的控制;在机器人需要到达工作壁面时,通过垂直推进器和水平推进器的配合,使机器人到达指定的深度和位置;在机器人对壁面进行吸附时,通过前方的两个垂直推进器的正转和后方的两个垂直推进器的反转形成力矩,使机器人首部转动指定角度,然后移动到吸附壁面;在机器人在垂直壁面运动时,四个垂直推进器提供机器人吸附壁面的推力,水平推进器完成机器人在垂直壁面行走的动力;在机器人绕圆柱面水平运动时,垂直推进器提供对壁面的吸附力,水平推进器辅助保证机器人在水平面运动的稳定性。
13.本发明的有益效果在于:
14.本发明设计了一种可浮游或行走的水下桥墩和导管架检测清洗机器人,行走轮式机构对运行的曲面具有一定的适应性,能够根据桥墩或导管架等工作壁面的曲率通过轮式机构的摆动装置,保证在机器人的曲面桥墩或导管架的竖直面上行走,也可通过旋转机器人的轮式机构,同时不改变机器人的主体的方向,使机器人环绕圆柱形曲面做圆周运动,同时利用机器人的视觉系统完成检测,利用机械手的携带装备完成清洗作业。本发明具有适应性、结构简单、检测和清洗精度高等优点。
附图说明
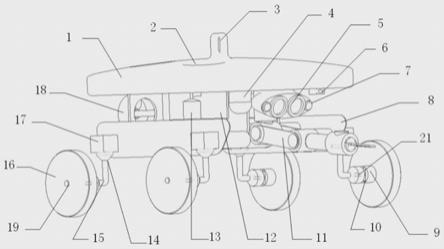
15.图1是本发明的总体结构图。
16.图2是本发明的总体结构的正视图。
17.图3是本发明的总体结构的后视图。
18.图4是本发明的总体结构的侧视图。
19.图5是本发明的总体结构的俯视图。
20.图6是本发明中曲面轮式机构摆动后垂直运动工作示意图。
21.图7是本发明的轮式机构转动后的总体结构图。
22.图8是本发明的轮式机构转动后绕柱运动工作示意图。
23.图9是本发明的轮式行走机构摆动原理图。
24.图10是本发明的轮式行走机构转动原理图。
具体实施方式
25.下面结合附图对本发明做进一步描述。
26.本发明设计了一种可浮游或行走的水下桥墩导管架检测清洗机器人,机器人的行走轮式机构对平台的复杂表面具有一定的适应性,根据桥墩或导管架的平面曲率摆动机器人的轮式结构,保证在曲面桥墩或导管架的竖直面上行走,也可旋转机器人的轮式机构,是机器人环绕圆柱形曲面运动,同时利用机械手末端的摄像机和高压水枪完成检测和清洗作业。本发明具有适应性、结构简单、检测和清洗精度高等优点。
27.一种可浮游或行走的水下桥墩导管架检测清洗机器人包括水下桥墩和导管架检测清洗的机器人主体、行走轮式机构,推进系统,视觉检测系统和清洗作业机械手几部分。其中主体主要由载体框架,安装在框架上的控制舱和电池舱,推进系统,视觉检测系统,运动感知系统组成。所述的推进系统包括两个水平矢量推进器和四个垂向推进器,其中两个矢量水平推进器安装在机器人框架的尾部,四个垂直推进器均匀垂直的安装在机器人的外壳上;所述的视觉感知系统主要由安装在机器人前方的双目视觉系统,水下照明灯,单目彩色水下摄像机,激光测距仪组成。所述的运动感知系统主要包括安装在控制舱和电池舱内的磁罗经和深度计,以及机器人框架上的多普勒测速仪组成;水下机械手采用常规的多关节水下作业机械臂,其末端可以携带高压水枪等其他作业装备,可以利用机器人的视觉系统完成对水下桥墩和导管架焊缝等位置的检测和清洗。所述的机器人的轮式行走机构包含摆动机构和转动机构,其中转动机构与机器人框架连接。
28.所述的机器人轮式行走机构中的摆动机构是通过铰接机构连接机器人的行动轮和转动机构的转轴实现的。其中所述的铰接机构主要由连接轴,带有伸出钢板的铰接座,铰接轴组成;其中所述的铰接座与机器人转动结构中的l型连杆通过一定的方式刚性连接,带有的延伸的钢板主要是为了使机器人的轮式机构能够与铰接座本体具有一定的距离,使轮式机构能够大幅度的摆动,钢板延伸出来的部分带有铰接孔;所述的连接轴与机器人的轮式机构刚性固定,并且设有轴孔;所述的铰接轴用来铰接连接轴和铰接座部分;所述的铰接机构通过电动的方式驱动,并且与机器人的控制系统连接。在机器人摆动到固定的角度后,可以通过控制系统锁定铰接机构的摆动值,使机器人能够正常的运动。
29.所述的机器人的行动轮由驱动电机,转轴和安装板组成。所述的安装板与上述铰接机构的连接轴刚性固定;所述的转轴负责行动轮的转动;所述的驱动电机用来辅助驱动机器人行动轮转轴的驱动,完成特殊情况下的要求。所述的行动轮由轮毂和外层的带有摩擦纹路的橡胶皮组成。,行动轮的大小需要满足机器人摆动机构的摆动幅度范围内使机器人的主体底部不触碰工作的壁面。
30.所述的机器人行动轮式机构中的转动机构是由驱动电机,转轴,l型连杆组成。所述的驱动电机安装在机器人的外部框架上,负责转轴的转动;转轴带动l型连杆的转动;l型连杆的另一端与上述的铰接机构的铰接座刚性固定,主要用来改变连接行动轮的方向,同时使机器人的行动轮下移动,保证机器人的底部距离工作的壁面具有充足的高度。上述的机器人的转动机构具有预设的角度和转动方向;其中机器人前方的两个分别逆时针转动90
°
,后方的两个分别顺时针转动90
°
。通过转动机构转动机器人的行动轮改变行动轮等的方向,可以使机器人的主体保持原来垂直的方向,使机器人围绕焊缝进行圆周检测时,能够充分利用到机器人的视觉系统和机械臂,从而更简单快捷的完成工作。
31.实施例1:
32.见图1~图5为一种可浮游或行走的水下桥墩导管架检测清洗机器人的实施方式。其中:1为机器人外壳,2为垂直推进器,3为吊点,4为单目彩色水下摄像机,5为水下双目视觉系统,6为激光测距仪,7为水下照明灯,8为框架,9为驱动电机安装位置示意,10为铰接座延伸钢板部分,11为机械臂,12为控制舱和电池舱,13为多普勒测速仪,14为转动机构的转轴,15为转动机构的l型连杆,16为行动轮,17为转动机构驱动电机,18为水平推进器,19为车轮转轴,20为铰接轴,21为铰接座。为了保证水下机器人的中性浮力状态,剩余的空间将用来添加浮力材。
33.基于上述的机器人的整体结构配置,下面将详细介绍机器人的整体配置情况。
34.机器人的行走机构由行动轮16,转轴,驱动电机9,安装板组成。所述的行走机构可以通过驱动电机9驱动转轴19转动从而带动行动轮行走。
35.上述的行走机构通过安装板与摆动机构中的连接轴刚性固定,可完成相应角度值的摆动,使机器人行动轮16的表面较好的接触曲面壁面。在此过程中,为了使机器人的行动轮16能够较好的接触壁面,可以通过控制系统协助完成,由于控制系统不属于本发明的范围,所以不再描述。
36.基于上述的摆动机构是通过铰接机构连接机器人的行动轮16的安装板和l型连杆15组成的;其中所述的铰接机构主要由连接轴,带有伸出钢板10的铰接座21,铰接轴20组成,其中所述的铰接座21与机器人转动结构中的l型连杆15刚性连接,带有的延伸的钢板10主要是为了使机器人的轮式机构能够与铰接座21具有一定的距离,使轮式机构能够大幅度的摆动,钢板延伸出来的部分带有铰接孔;所述的连接轴与机器人的轮式机构刚性固定,并且设有轴孔;所述的铰接轴20用来铰接连接轴和铰接座整体;所述的铰接机构通过电动的方式驱动,并且与机器人的控制系统连接。通过驱动电机完成铰接机构角度值的摆动,并在到达所需角度值后由控制系统对该角度值下的铰接机构进行锁死,完成整个轮式结构对壁面的贴合吸附过程。
37.基于以上所述,机器人的转动机构与摆动机构连接。其中所述的转动机构与机器人的框架8刚性固定,所述的转动机构由转轴14,驱动电机17,l型连杆15组成。驱动电机17与机器人的框架8刚性固定,完成驱动转轴14转动的功能;转轴14连接驱动电机17和l型连杆15,负责转动l型连杆15完成对铰接轮式机构的转动;l型连杆15用来连接铰接座21和转轴14。通过驱动电机17驱动转轴14按照系统预定的角度和方向转动,与l型连杆15刚性固定的摆动轮式机构完成转动。具体的,当机器人需要绕圆周运动时,通过转动机构使机器人前方的两个行动轮16逆时针转动90
°
,后方的两个行动轮16顺时针转动90
°
,此种情况下,鉴于机器人整体框架8的设计,机器人仍然可以保持良好的稳定性,然后利用行动轮的驱动电机使机器人能够完成圆周运动的检测。
38.基于以上所述,行走轮式机构整体与机器人的框架8连接,并且使用的驱动电机等装置都需要进行密封处理,密封技术可以使用当前较为常规的设计,在此不再进行叙述。所述的机器人框架8的中心安装有机器人的控制舱和电池舱12,其目的是可以保证机器人整体结构的稳定性,其中所述的控制舱和电池舱12需要放置在耐压仓内。
39.基于以上所述,机器人的推进系统主要由矢量布置在机器人后方的两个水平推进器18以及垂直机器人外壳布置的四个垂直推进器2组成。所述的推进系统在机器人运行的
过程中起到有至关重要的作用,其中所述的每个推进器都可以单独进行控制转动及转向,使其产生不同大小和方向的推力。具体的,在机器人需要到达工作壁面时,通过垂直推进器2和水平推进器18的配合,使机器人到达指定的深度和位置;在机器人对壁面进行吸附时,通过垂直推进器2中前方的两个和后方的两个的正转和反转形成力矩,使机器人首部转动90
°
,然后缓慢移动到吸附壁面;在机器人在垂直壁面运动时,四个垂直推进器2提供机器人吸附壁面的推力,水平推进器18完成机器人在垂直壁面行走的动力;在机器人绕圆柱面水平运动时,垂直推进器2提供对壁面的吸附力,水平推进器18可以辅助保证机器人在水平面运动的稳定性。
40.基于以上所述,机器人运动感知系统主要有控制舱内的磁罗经,高度计以及安装在机器人框架8内部的多普勒测速仪13组成。机器人的运动感知系统主要是对机器人的位姿和运动速度进行反馈,从而完成对机器人的位置姿态调节,使机器人能够稳定在壁面工作。
41.基于以上所述,机器人的视觉感知系统包括水下双目视觉系统5,单目彩色水下摄像机4,水下照明灯7,以及激光测距仪6。单目彩色水下摄像机4安装在机器人的外壳1下方,水下双目视觉系统5和照明灯7集成在一起,通过固定装置,一定角度的安装在机器人的前方;激光测距仪7通过可转动装置安装在机器人外壳1的下方,可根据情况进行角度调整。水下照明灯7用于水下光线不足情况下提供照明;单目摄像机4主要负责拍摄记录提供实时画面;水下双目视觉系统5负责对检测目标的识别,测量,用于在控制机械臂11的清理操作。
42.基于以上所述,机器人的清理工作主要通过安装在机器人框架8上的机械臂11完成。所述的机械臂11主要由机械手的肩部,上臂,肘,前臂,手腕,爪组成。机械手的肩部包括俯仰关节和摆动关节,肘部包括俯仰关节,手腕包括摆动关节;所述的机械臂的各个关节都采用的封闭结构的形式。具体的,机械臂的前端可以携带高压水枪完成对需要清理部位的准确清理。
43.本实施例的工作原理:首先使机器人通过垂直推进器2和水平推进器18到达水下需要工作的桥墩或者导管架附近,接着通过四个垂直推进器2以及水平推进器18的配合产生力矩,使机器人的首部顺时针能够转动一定的角度,并保持该姿态逐渐贴近工作壁面,在机器人的行动轮16贴到工作的壁面后,通过利用机器人的反馈系统,调节机器人行走轮式机构的摆动机构,使行动轮16的表面能够垂直工作的壁面,最后利用垂直推进器2,水平推进器18以及驱动电机使行动轮沿着垂直壁面前进,此时四个垂直推进器2持续提供推力,使机器人能够完好的吸附不至于脱落,水平推进器18提供前进的动力。当需要机器人需要围绕圆柱体进行圆周运动来清理检查时,通过驱动电机9首先使机器人摆动机构回到原位,然后利用转动机构的驱动电机17驱动转轴14转动到原有状态,此时四个垂直推进器2提供机器人吸附壁面的吸附力,水平推进器18可以用来维持机器人在水平面上的平衡,机器人依靠行动轮16的驱动电机9运动,这时机器人可以通过视觉系统对圆周的焊缝进行检测,并利用机械手臂11对检测的部位进行清理。
44.本发明设计了一种可浮游或行走的水下桥墩和导管架检测清洗机器人,行走轮式机构对运行的曲面具有一定的适应性,能够根据桥墩或导管架等工作壁面的曲率通过轮式机构的摆动装置,保证在机器人的曲面桥墩或导管架的竖直面上行走,也可通过旋转机器人的轮式机构,同时不改变机器人的主体的方向,使机器人环绕圆柱形曲面做圆周运动,同
时利用机器人的视觉系统完成检测,利用机械手的携带装备完成清洗作业。本发明具有适应性、结构简单、检测和清洗精度高等优点。
45.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。