1.本实用新型涉及一种可变形推进装置、救援船及救援系统,属于水上救援技术领域。
背景技术:
2.目前的救援船通过螺旋桨转动推动水向后运动,从而产生推进。通过螺旋桨不同的转速来实现推进速度的调整,通过两个螺旋桨差速转动实现救援船的换向。目前,螺旋桨一般固定于船体下方,这样可以实现水流的有效推动,从而产生大推力实现高速运动,然而存在几个问题:1)传统固定于船体下方的螺旋桨,容易造成在水面行驶时稳定性差导致偏航的现象,并且容易颠簸;2)传统固定于船体下方的螺旋桨使得船体的重心过高,使落水者在慌乱中很难抓住救援船体;3)重心过高还造成船体容易倾斜甚至翻覆,威胁落水者的安全。
技术实现要素:
3.本实用新型的第一个目的是为了解决上述现有技术的问题,提供一种救援船,其解决了救援船在救援途中高速度运行和近身救援时船体稳定性的矛盾,实现在救援途中快速接近被救援者,在近身被救援落水者之后提供稳定的船体,且实现较高速的救援上岸。
4.本实用新型的第二个目的在于提供一种救援船,该救援船包含上述的可变形推进装置,通过对可变形推进装置的变形,可以实现两侧推力的不对称性,从而减小拐弯半径,增加救援时的机动性。
5.本实用新型的第三个目的在于提供一种救援系统,该系统包含上述的救援船。
6.本实用新型的第一个目的可以通过采取如下技术方案达到:
7.一种可变形推进装置,包括螺旋桨、外壳、主动齿轮、从动齿轮和电机,所述主动齿轮和从动齿轮均为两个,两个从动齿轮与外壳形成一体结构,并与两个主动齿轮一一对应啮合,两个主动齿轮分别为直齿圆柱齿轮轴和直齿圆柱齿轮,所述电机的电机轴、直齿圆柱齿轮轴和直齿圆柱齿轮依次连接,所述螺旋桨设置在外壳内,并分别与两个从动齿轮连接,外壳通过连杆固定在直齿圆柱齿轮轴上。
8.进一步的,所述电机的电机轴通过联轴器与直齿圆柱齿轮轴连接。
9.进一步的,两个从动齿轮与两个主动齿轮一一对应啮合以实现角度的控制,控制的角度范围为0~180
°
。
10.进一步的,两个主动齿轮的模数为2,齿数为80,分度圆直径为160mm。
11.进一步的,两个从动齿轮的模数为2,分度圆直径为150mm。
12.进一步的,两个从动齿轮的齿数为20。
13.本实用新型的第二个目的可以通过采取如下技术方案达到:
14.一种救援船,包括船体以及上述的可变形推进装置,所述可变形推进装置为两个,两个可变形推进装置分别设置在船体的两侧。
15.进一步的,所述船体的尾部设置有两个同步扇形舵面。
16.进一步的,每个可变形推进装置中的两个主动齿轮内嵌于船体。
17.本实用新型的第三个目的可以通过采取如下技术方案达到:
18.一种救援系统,包括终端、救援平台以及上述的救援船,所述终端由消防人员使用,所述救援平台设置在救援大厅,且救援平台与终端连接,所述救援船分别与终端、救援平台连接。
19.本实用新型相对于现有技术具有如下的有益效果:
20.本实用新型的可变形推进装置是通过结合流体动力学、人机工程学、机械工程学进行改进的,能够根据救援过程的各个阶段自主控制,相对于传统的固定螺旋桨的结构,适应水面的螺旋桨不仅能够在救援途中快速推进,还能够通过调节螺旋桨的对称性,减小拐弯半径,增加机动性,使救援船快速靠近被救援者;通过对称变形改变船体重心高度,使被救援者能够方便抓取;提高救援船在水面的稳定性,减小救援船翻覆的危险。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
22.图1为本实用新型实施例的救援船的立体结构图。
23.图2为本实用新型实施例的救援船的正视结构图。
24.图3为本实用新型实施例的救援船的俯视结构图。
25.图4为本实用新型实施例的救援船的左视结构图。
26.图5为本实用新型实施例的救援船的结构框图。
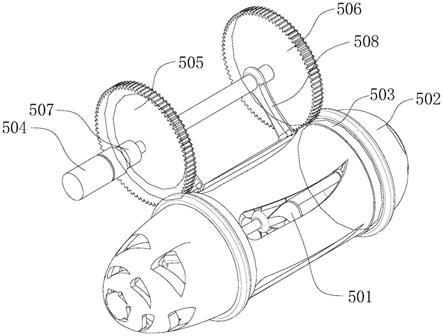
27.图6为本实用新型实施例的可变形推进装置的立体结构图。
28.图7为本实用新型实施例的可变形推进装置的主视结构图。
29.图8为本实用新型实施例的可变形推进装置的俯视结构图。
30.图9为本实用新型实施例的可变形推进装置的左视结构图。
31.图10为本实用新型实施例的救援系统的结构框图。
32.其中,1-船体,2-浮台,3-语音播放装置,4-摄像装置,401-摄像头,402-支架,5-可变形推进装置,501-螺旋桨,502-外壳,503-从动齿轮,504-电机,505-直齿圆柱齿轮轴,506-直齿圆柱齿轮,507-联轴器,508-连杆,6-定位装置,7-通信装置,8-控制装置,9-挂钩,10-麻绳,11-扇形舵面,12-终端,13-救援平台,14-救援船。
具体实施方式
33.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.实施例:
35.如图1~图5所示,本实施例提供了一种救援船,该救援船包括船体1、浮台2、语音播放装置3、摄像装置4、可变形推进装置5、定位装置6、通信装置7和控制装置8,语音播放装置3和摄像装置4设置在浮台2上,可变形推进装置5为两个,两个可变形推进装置5分别设置在船体1的两侧,定位装置6、通信装置7和控制装置8设置在浮台2内部,控制装置8分别与语音播放装置3、摄像装置4、可变形推进装置5、定位装置6、通信装置7连接,控制装置5可以为单片机等控制器。
36.进一步地,船体1的外形设计为流线形,以减少水中的阻力,且采用较宽船体1,提高救援船在救援中的稳定性;浮台2设置在距离船体1前端的预设距离位置上,该预设距离为520mm,浮台2的尺寸为350mm*180mm*60mm,浮台2可内置电池等硬件。
37.进一步地,语音播放装置3为喇叭,可供被救援者进行呼救;摄像装置4包括摄像头401和支架402,摄像头401通过支架402设置在浮台2上;为了实现摄像头的全景摄像和高度调整,摄像头401采用360
°
的全景摄像头,全景摄像头能够进行全天候对水面进行观测,针对水面异样进行信息反馈,使得终端进行实时判断是否进行救援,支架为可伸缩三脚支架,可伸缩三脚支架可针对水位等实际情况进行摄像头401的高度调整。
38.进一步地,定位装置6为北斗定位模块,通信装置7为5g通信模块,通过安装北斗定位模块和5g通信模块,可以对事故地点就行多级精度定位,使救援船能够精确到达事故现场,并快速到达被救援者周围,同时将救援现场信息实时传递回救援大厅的救援平台,实现救援。
39.进一步地,船体1的四周设置有等距的十八个挂钩9,十八个挂钩9上设置有麻绳10,挂钩9配合麻绳10使用,可供被救援者抓拿,以达到救援的效果。
40.如图1~图9所示,每个可变形推进装置5包括螺旋桨501、外壳502、主动齿轮、从动齿轮503和电机504,主动齿轮和从动齿轮503均为两个,两个从动齿轮503与两个主动齿轮一一对应啮合,螺旋桨501设置在外壳502内,并分别与两个从动齿轮503连接,通过从动齿轮503与主动齿轮的相互啮合实现角度的控制,控制的角度范围为0
°
~180
°
,通过改变螺旋桨501张合的角度,进而调整救援船的稳定性,夹角变化范围为0
°
~180
°
,螺旋桨501转速相同时可直线行驶,螺旋桨501转速不同时可进行换向;在快速推进时螺旋桨501对称在船体1下方;在接近被救援者后根据救援船转弯需要调整两侧螺旋桨的对称性,实现快速小半径转弯,在靠近被救援者之后两个螺旋桨501对称转向船体1两侧,降低船身,增强船体1稳定性。
41.进一步地,两个从动齿轮503与外壳502形成一体结构,其模数为2,分度圆直径为150mm;为了使每个可变形推进装置5的螺旋桨501能偏转90
°
并考虑到安全因素,仅设计20个齿,此时可达最大单边转角为96
°
。
42.进一步地,两个主动齿轮分别为直齿圆柱齿轮轴505和直齿圆柱齿轮506,电机504的电机轴、直齿圆柱齿轮轴505和直齿圆柱齿轮506依次连接,两个主动齿轮的模数为2,齿数为80,分度圆直径为160mm;为考虑安全因素,将直齿圆柱齿轮轴505和直齿圆柱齿轮506内嵌于船体1;为了实现电机504的电机轴与直齿圆柱齿轮轴505连接,还设置了联轴器507,电机的电机轴504通过联轴器507与直齿圆柱齿轮轴505连接。
43.进一步地,外壳502通过连杆508固定在直齿圆柱齿轮轴505上,使螺旋桨501能够
绕直齿圆柱齿轮轴505进行旋转,实现偏转角度的控制。
44.进一步地,船体1的尾部设置有两个同步扇形舵面11,可以配合螺旋桨501进行辅助快速转向,提高了远程协作救援船的机动性,该扇形舵面没有棱角,且采用较柔软材料,可减少救援中对人可能造成的伤害。
45.如图10所示,本实施例还提供了一种救援系统,该系统包括终端12、救援平台13以及上述的救援船14,终端12由消防人员使用,救援平台13设置在救援大厅,且救援平台13与终端12连接,救援船14分别与终端12、救援平台13连接,其中终端可以是手机、平台电脑等设备,救援平台13可以是计算机等设备。
46.本实施例还提供了一种救援方法,该方法基于上述的救援系统实现,包括以下步骤:
47.s1、在消防人员的终端得到落水求救信号后,消防人员的终端根据救援船中的摄像装置反馈的水面信息,判断水面信息是否存在异样,若水面信息存在异样,则根据水面异样情况判断是否能够进行救援,若水面异样情况不足以影响救援,则判断能够进行救援,进入步骤s2;若水面信息不存在异样,则判断能够进行救援,进入步骤s2。
48.s2、在确定进行救援后,接收消防人员的远程操控信号,并将远程操控信号发送给救援船,使救援船行驶到事故现场,同时救援船将救援现场信息实时传递回救援大厅的救援平台,实现救援。
49.在本实用新型的描述中,需要说明的是,除非另有明确的规定和约定,术语“设置”、“安装”、“连接”应做广义理解,例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
50.综上所述,本实用新型的可变形推进装置是通过结合流体动力学、人机工程学、机械工程学进行改进的,能够根据救援过程的各个阶段自主控制,相对于传统的固定螺旋桨的结构,适应水面的螺旋桨不仅能够在救援途中快速推进,还能够通过调节螺旋桨的对称性,减小拐弯半径,增加机动性,使救援船快速靠近被救援者;通过对称变形改变船体重心高度,使被救援者能够方便抓取;提高救援船在水面的稳定性,减小救援船翻覆的危险。
51.以上所述,仅为本实用新型专利较佳的实施例,但本实用新型专利的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型专利所公开的范围内,根据本实用新型专利的技术方案及其实用新型构思加以等同替换或改变,都属于本实用新型专利的保护范围。