1.本实用新型涉及救援器材技术领域,尤其涉及一种水面遥控救援机器人。
背景技术:
2.随着我国经济发展、社会进步和公众安全意识提高,社会各方对应急产品和服务的需求不断增长。但我国应急产业起步晚,一些产品技术含量不高,部分关键技术产品依赖进口,无法满足人们对应急装备适应性、可靠性、安全性的要求。
3.目前,水上作业人员发生意外落水事故时,其救援措施多为向落水人员抛投传统圆形救生圈,但抛投距离受限制,通常为水平方向10米内,且无法精准抛投到落水人员位置,延误最佳救援时机,同时,传统圆形救生圈受到水流流向的影响较大,易造成救援失败。
技术实现要素:
4.为了克服现有技术的缺陷,本实用新型所要解决的技术问题在于提出一种水面遥控救援机器人,采用气囊船体、防水集控盒、固定座、推进器以及自动充气阀组构成,使水面遥控救援机器人可以实现远程精准遥控,增大搜救范围,运行更平稳可靠,提高救援效果。
5.为达此目的,本实用新型采用以下技术方案:
6.本实用新型提供的一种水面遥控救援机器人,包括气囊船体、防水集控盒、固定座、若干个推进器以及自动充气阀组,防水集控盒通过固定座与气囊船体可拆卸连接,自动充气阀组的出气端与气囊船体的进气端相连通,推进器与气囊船体的底部可拆卸连接,推进器的信号端与防水集控盒的信号端电性连接。
7.本实用新型优选的技术方案在于,自动充气阀组包括水敏充气阀以及气瓶件,气瓶件的出气端通过水敏充气阀与气囊船体的进气端相连通。
8.本实用新型优选的技术方案在于,固定座包括连接梁以及两个支撑座,连接梁的两端分别通过一个支撑座与气囊船体可拆卸连接,防水集控盒固定在连接梁上。
9.本实用新型优选的技术方案在于,气囊船体的外周均匀铺设有防撞条。
10.本实用新型优选的技术方案在于,气囊船体上设有备用阀门。
11.本实用新型优选的技术方案在于,气囊船体配置为u型气囊体。
12.本实用新型的有益效果为:
13.本实用新型提供的水面遥控救援机器人,气囊船体落水后,自动充气阀组遇水会自动对气囊船体进行充气,使气囊船体形成一个饱满的救生气囊,操作人员通过遥控器,可与防水集控盒进行信号传输,以控制推进器运行,从而推动气囊船体朝指定位置移动,其中,固定座用以定位装配防水集控盒,拆装更换方便。采用可拆卸模块设计,故障率低,且便于后期维护。防水集控盒位于水面之上,不与水直接接触,且采用密封防水防刮耐磨设计,使防水集控盒更经久耐用。遥控控制距离至少公里,增大搜救范围。落水后水面遥控救援机器人可自动触发自动充气阀组对气囊船体进行充气,遥控并快速开往落水人员身边,不惧水流影响,可逆向、横渡行驶,增大救援机会。本申请的水面遥控救援机器人重量比传统u型
艇轻,维护方便,操作简单。防水集控盒具有超长续航时间,可连续工作至少小时,更换电池方便。通过上述过程,使水面遥控救援机器人可以实现远程精准遥控,增大搜救范围,运行更平稳可靠,提高救援效果。
附图说明
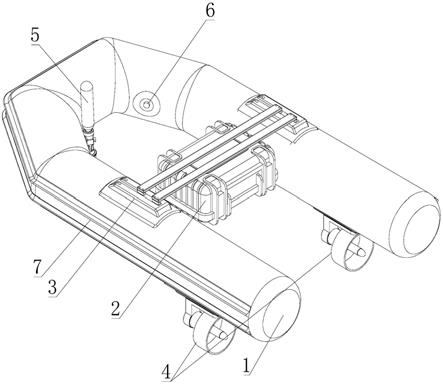
14.图1是本实用新型具体实施方式中提供的水面遥控救援机器人的整体结构示意图;
15.图2是本实用新型具体实施方式中提供的水面遥控救援机器人的细节结构示意图。
16.图中:
17.1、气囊船体;2、防水集控盒;3、固定座;31、连接梁;32、支撑座;4、推进器;5、自动充气阀组;51、水敏充气阀;52、气瓶件;6、备用阀门;7、防撞条。
具体实施方式
18.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
19.如图1和图2所示,为了使水面遥控救援机器人可以实现远程精准遥控,增大搜救范围,运行更平稳可靠,提高救援效果,进一步地,本实施例中提供的一种水面遥控救援机器人,包括气囊船体1、防水集控盒2、固定座3、若干个推进器4以及自动充气阀组5,防水集控盒2通过固定座3与气囊船体1可拆卸连接,自动充气阀组5的出气端与气囊船体1的进气端相连通,推进器4与气囊船体1的底部可拆卸连接,推进器4的信号端与防水集控盒2的信号端电性连接。气囊船体1落水后,自动充气阀组5遇水会自动对气囊船体1进行充气,使气囊船体1形成一个饱满的救生气囊,操作人员通过遥控器,可与防水集控盒2进行信号传输,以控制推进器4运行,从而推动气囊船体1朝指定位置移动,其中,固定座3用以定位装配防水集控盒2,拆装更换方便。采用可拆卸模块设计,故障率低,且便于后期维护。防水集控盒2位于水面之上,不与水直接接触,且采用密封防水防刮耐磨设计,使防水集控盒2更经久耐用。遥控控制距离至少2公里,增大搜救范围。落水后水面遥控救援机器人可自动触发自动充气阀组5对气囊船体1进行充气,遥控并快速开往落水人员身边,不惧水流影响,可逆向、横渡行驶,增大救援机会。本申请的水面遥控救援机器人重量比传统u型艇轻,维护方便,操作简单。防水集控盒2具有超长续航时间,可连续工作至少3小时,更换电池方便。通过上述过程,使水面遥控救援机器人可以实现远程精准遥控,增大搜救范围,运行更平稳可靠,提高救援效果。
20.优选地,自动充气阀组5包括水敏充气阀51以及气瓶件52,气瓶件52的出气端通过水敏充气阀51与气囊船体1的进气端相连通。水敏充气阀51遇水后可启动并刺破气瓶件52的瓶口,使气瓶件52经过水敏充气阀51对气囊船体1实现充气,通过上述过程,使自动充气阀组5遇水后可实现自动充气。
21.优选地,固定座3包括连接梁31以及两个支撑座32,连接梁31的两端分别通过一个支撑座32与气囊船体1可拆卸连接,防水集控盒2固定在连接梁31上。连接梁31用以定位装配防水集控盒2,支撑座32用以定位装配连接梁31,拆装方便,便于后续维护。
22.优选地,气囊船体1的外周均匀铺设有防撞条7。防撞条7沿气囊船体1的外周均匀
铺设,可防止异物直接与气囊船体1相碰撞而损伤气囊船体1,起到防护作用。
23.优选地,气囊船体1上设有备用阀门6。备用阀门6可直接开启实现泄压放气,或者连接备用的自动充气阀组5实现遇水自动充气,或者连接充气泵实现充气。
24.优选地,气囊船体1配置为u型气囊体。采用u型气室设计的u型气囊体,可将浮力最大化达320n。
25.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本申请的权利要求内的实施例都属于本实用新型保护的范围。
技术特征:
1.一种水面遥控救援机器人,其特征在于:包括气囊船体(1)、防水集控盒(2)、固定座(3)、若干个推进器(4)以及自动充气阀组(5);所述防水集控盒(2)通过所述固定座(3)与所述气囊船体(1)可拆卸连接,所述自动充气阀组(5)的出气端与所述气囊船体(1)的进气端相连通,所述推进器(4)与所述气囊船体(1)的底部可拆卸连接,所述推进器(4)的信号端与所述防水集控盒(2)的信号端电性连接。2.根据权利要求1所述的水面遥控救援机器人,其特征在于:所述自动充气阀组(5)包括水敏充气阀(51)以及气瓶件(52);所述气瓶件(52)的出气端通过所述水敏充气阀(51)与所述气囊船体(1)的进气端相连通。3.根据权利要求1所述的水面遥控救援机器人,其特征在于:所述固定座(3)包括连接梁(31)以及两个支撑座(32);所述连接梁(31)的两端分别通过一个所述支撑座(32)与所述气囊船体(1)可拆卸连接,所述防水集控盒(2)固定在所述连接梁(31)上。4.根据权利要求1所述的水面遥控救援机器人,其特征在于:所述气囊船体(1)的外周均匀铺设有防撞条(7)。5.根据权利要求1所述的水面遥控救援机器人,其特征在于:所述气囊船体(1)上设有备用阀门(6)。6.根据权利要求1所述的水面遥控救援机器人,其特征在于:所述气囊船体(1)配置为u型气囊体。
技术总结
本实用新型公开了一种水面遥控救援机器人,属于救援器材技术领域,水面遥控救援机器人包括气囊船体、防水集控盒、固定座、若干个推进器以及自动充气阀组,防水集控盒通过固定座与气囊船体可拆卸连接,自动充气阀组的出气端与气囊船体的进气端相连通,推进器与气囊船体的底部可拆卸连接,推进器的信号端与防水集控盒的信号端电性连接。本实用新型公开的水面遥控救援机器人,采用气囊船体、防水集控盒、固定座、推进器以及自动充气阀组构成,使水面遥控救援机器人可以实现远程精准遥控,增大搜救范围,运行更平稳可靠,提高救援效果。提高救援效果。提高救援效果。
技术研发人员:李荣河 李飞 游志忠
受保护的技术使用者:厦门市神手科技有限公司
技术研发日:2021.08.27
技术公布日:2022/1/18