1.本实用新型涉及水生生物清理技术领域,尤其涉及一种无人清理船。
背景技术:
2.凤眼蓝于2003年被国家列为第一批外来入侵物种名单,30年代作为畜禽饲料引入中国内地各省并推广种植,后逃逸为野生植物。由于凤眼蓝繁殖速度极快,已广泛分布于华北、华东、华中、华南和西南的19个省市,尤以云南、江苏、浙江、福建等省的入侵最为严重,给当地环境带来了极大的威胁。国内外专家学者对凤眼蓝的入侵做了大量的研究,现有的凤眼蓝的防治方法包括机械方法、化学方法和生物防治等,但都未能达到从根本上控制住其蔓延和危害。这是由于凤眼蓝超强的适生和繁殖能力,一旦形成入侵规模,就非常难以根除。
3.目前国内对于凤眼蓝的清除手段仍然以人工打捞与大型打捞船为主,人工打捞主要通过人在小型船只上以手动收集凤眼蓝的方式进行,并将收集的凤眼蓝堆积在小型船只上,这种作业方法效率低下,打捞效率低,人工成本高。大型打捞船主要通过大型传送装置将凤眼蓝成片地送入打捞船收集框内,这种方式适用于大型湖泊或河道,但不适用于小型湖泊与小型水渠。打捞船只的租用成本高,而且凤眼蓝在全国各地均有爆发点,而拥有打捞船只的企业公司较少,大型打捞船只体积大,运输困难,因此将打捞船只运送至特定水域的运输成本极高。
技术实现要素:
4.本实用新型的目的在于提供一种无人清理船。根据本实用新型的无人清理船,自动化程度高,适用于各种大小型水域,可通过远程下达指令,实现入侵生物凤眼蓝的全自动清理,节省人力物力,本实用新型采用的技术方案如下:
5.根据本实用新型的一个方面,提供了一种无人清理船,包括船体,所述船体的前侧安装有云台架,所述云台架上设有云台,在所述云台的前侧设有摄像头,所述云台架的前侧且位于云台的下方设有清理机构,所述船体上安装有电源支架,所述电源支架上设有电源机构,所述船体上且位于所述电源机构的下方设有涵道风扇,所述船体上安装有支杆,所述支杆上设有安装架,所述安装架的前侧设有传输机构,所述安装架的后侧设有警示灯,所述安装架的上侧设有导航机构,所述船体的后侧设有信号天线,所述船体的两侧和前侧均设有避障传感器,所述船体内还设有控制器,所述云台、摄像头、导航机构、涵道风扇、警示灯、清理机构、信号天线和避障传感器均与所述控制器连接。
6.优选的,所述电源机构包括太阳能板、太阳能控制器和电池,所述太阳能板安装在所述电源支架上,所述太阳能控制器与所述太阳能板连接,所述电池与所述太阳能控制器连接。
7.优选的,所述传输机构包括图传数传一体传输模块和5g上网卡,所述图传数传一体传输模块与所述5g上网卡连接,所述图传数传一体传输模块无线连接有地面站,所述图
传数传一体传输模块与所述控制器连接。
8.优选的,所述导航机构包括gps和ins,所述gps和所述ins进行联合导航。
9.优选的,所述云台包括舵机和陀螺仪,所述舵机和所述陀螺仪均与所述控制器连接。
10.优选的,清理机构包括直流减速电机和切割刀具,所述直流减速电机与所述云台架连接,所述切割刀具固定连接在所述直流减速电机的输出轴上,所述直流减速电机与所述控制器电性连接。
11.优选的,所述避障传感器为超声波避障传感器。
12.优选的,所述摄像头通过嵌入式边缘计算平台与所述控制器连接。
13.本实用新型采用的上述技术方案,具有如下显著效果:
14.本实用新型的无人清理船通过摄像头收集凤眼蓝位置图像信息,传输至控制器,控制器根据导航机构和避障传感器提供航行的方向,并通过涵道风扇提供行驶动力,经过清理机构对凤眼蓝进行清理工作,不仅在大型水域可以执行凤眼蓝清理工作,在一些小型湖泊、河渠和细长水道均能进行清理工作,而且清理船网络无需人工操控,可通过传输机构与用户端连接进行异地远程任务下达,实现入侵生物凤眼蓝的全自动清理以及水生植物生物量控制,大幅节省人力物力。
附图说明
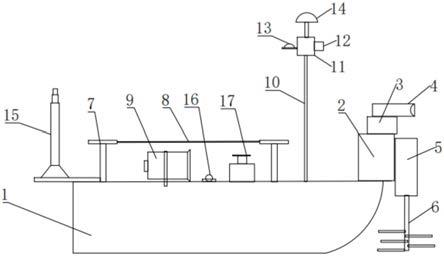
15.图1是本实用新型的结构示意图。
[0016]1‑
船体,2
‑
云台架,3
‑
云台,4
‑
摄像头,5
‑
直流减速电机,6
‑
切割刀具,7
‑
电源支架,8
‑
太阳能板,9
‑
涵道风扇,10
‑
支杆,11
‑
安装架,12
‑
传输机构,13
‑
警示灯,14
‑
导航机构,15
‑
信号天线,16
‑
避障传感器,17
‑
应急开关按钮。
具体实施方式
[0017]
为使本实用新型的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实施例,对本实用新型进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本实用新型的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本实用新型的这些方面。
[0018]
如图1所示,根据本实用新型的一种无人清理船,无人清理船包括船体,船体内还设有控制器,控制器的型号为stm32f407zgt6,船体的前侧安装有云台架,云台架上设有云台,在云台的前侧设有摄像头,摄像头通过嵌入式边缘计算平台与控制器连接。
[0019]
云台包括舵机和陀螺仪,舵机和陀螺仪均与控制器连接,舵机由电机、电位计、嵌入式控制系统和变速箱组成,电机输出轴的位置由内部电位计不断采样测量,并与控制器设置的目标位置进行比较;根据相应的偏差,嵌入式控制系统会调整电机输出轴的实际位置,使其与目标位置匹配,这样就形成了闭环控制系统,使用stm32f407的tim9的通道1和通道2两路输出周期为20ms的pwm信号对舵机进行控制。陀螺仪的型号为mpu6050,利用mpu6050芯片内部的dmp模块(digital motion processor数字运动处理器),可对传感器数据进行滤波、融合处理,它直接通过i2c接口向主控器输出姿态解算后的姿态数据,降低主控器的运算量。其姿态解算频率最高可达200hz。云台可以用来固定数码相机和单反等摄像
工具,利用云台的自稳效果可以让安装于云台上的摄像头均匀地旋转来拍摄视频。云台可对摄像头进行稳定和移动。
[0020]
云台架的前侧且位于云台的下方设有清理机构,清理机构包括直流减速电机和切割刀具,直流减速电机与云台架连接,切割刀具固定连接在直流减速电机的输出轴上,切割刀具高度为136mm,切割刀具的直径为180mm,切割刀具由五个刀片沿轴线方向间隔10mm高度设置,并且五个刀片绕着中心轴以间隔60
°
设置。直流减速电机与控制器电性连接,通过控制器控制直流减速电机运转,使五个刀片具能够实现对不同高度的风眼蓝进行搅碎,直流减速电机驱动旋转,直流减速电机的参数为:电压12v,空载转速每分钟462转,额定转速每分钟346转,额定力矩6.00kg.cm,堵转力矩16.2kg.cm,切割刀具的切割力6.67n。
[0021]
船体上安装有电源支架,电源支架上设有电源机构,电源机构包括太阳能板、太阳能控制器和电池,太阳能板安装在电源支架上,太阳能控制器与太阳能板连接,电池与太阳能控制器连接。通过太阳能板将太阳能转换成为电能,可为清理船上的器件提供电能,节省能源消耗。
[0022]
船体上且位于电源机构的下方设有涵道风扇,涵道风扇为正反对转的涵道,可以相互抵消反扭力,提升船体的操控稳定性,涵道的控制方式为pwm信号控制,通过使用stm32输入脉宽为2500ms,脉冲长度为1100
‑
1900ms的脉冲段,实现对涵道风扇的推力控制。
[0023]
船体上安装有支杆,支杆上设有安装架,安装架的前侧设有传输机构,传输机构包括图传数传一体传输模块和5g上网卡,图传数传一体传输模块与5g上网卡连接,图传数传一体传输模块无线连接有地面站。rplink
‑
a3无线数传图传一体无限距离网络传输模块与5g上网卡相连,搭载在无人船处,共同构建一个服务于无人船导航仪与qgroundcontrol地面站的低时延、无限距离的无线通信网络。qgroundcontrol地面站通过该无线通信网络,基于mavlink协议,配合无人船上的各种传感器,实现与无人船的数据传输、图像传输、远程遥控等功能
[0024]
安装架的后侧设有警示灯,警示灯与控制器连接,安装架的上侧设有导航机构,导航机构包括gps和ins,gps和所述ins进行联合导航。船体的后侧设有信号天线。
[0025]
船体的两侧和前侧均设有避障传感器,避障传感器为超声波避障传感器。超声笔避障传感器可感知清理船周边环境,为清理船的航行提供保障。
[0026]
船体上还设有应急开关按钮,可通过按下开关,即可让清理船停止。
[0027]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。