1.本实用新型涉及一种无人飞行器,具体为一种全角度多载重搭配的模块化航拍无人飞行器,属于行业应用型无人飞行器技术领域。
背景技术:
2.现有的航拍无人飞行器,拍摄的画面范围较小,只能拍摄飞行器前后左右和下方的画面,无法拍到飞行器上面的画面,在一些专业用途时,上面的画面无法拍摄,飞行器作用无法最大化。
技术实现要素:
3.本实用新型的目的就在于为了解决上述问题而提供一种全角度多载重搭配的模块化航拍无人飞行器。
4.本实用新型通过以下技术方案来实现上述目的,一种全角度多载重搭配的模块化航拍无人飞行器,包括飞行器机身、全角度云台和云台相机,所述飞行器机身分为动力机身和固定机身,所述动力机身分为左右两个对称的机翼架,各机翼架分别于独立的供电电池连接,所述动力机身与所述固定机身之间活动连接,所述全角度云台与固定机身连接,所述全角度云台上设置有环形的俯仰轴,固定机身位于俯仰轴的环形中心处,所述云台相机设置在所述俯仰轴上。
5.作为本实用新型的一种技术优化方案,所述俯仰轴的旋转角度为360
°
,所述云台相机位于俯仰轴的旋转节上,跟随俯仰轴转动。
6.作为本实用新型的一种技术优化方案,所述云台相机为可拆卸结构,其与俯仰轴之间通过模块化的装配接口实现对接。
7.作为本实用新型的一种技术优化方案,所述固定机身内部安装有飞行控制器,固定机身的边缘设置有机身连接模块。
8.作为本实用新型的一种技术优化方案,所述动力机身上设置有配合机身连接模块的连接节,并通过连接节和机身连接模块配合与固定机身活动连接。
9.作为本实用新型的一种技术优化方案,所述全角度云台底部设置有若干个机架,通过机架对云台相机结构进行保护。
10.本实用新型的有益效果是:本装置通过无人飞行器与云台的整体结合,让云台的俯仰方向可以360
°
旋转,从而在一个飞行悬停机位,拍摄所有角度的画面,通过模块化的组装结构,使相机可自由选择,动力可自由搭配,增加便捷性,适用于多种行业应用。
附图说明
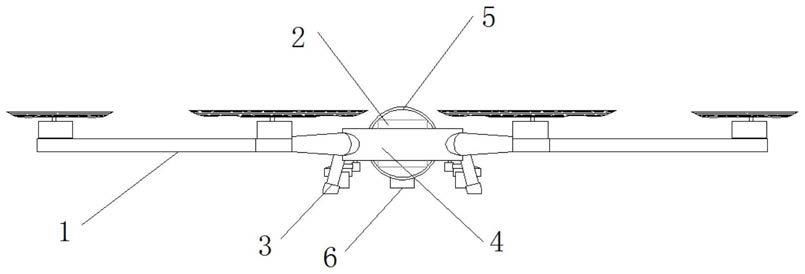
11.图1为本实用新型整体结构示意图;
12.图2为本实用新型俯仰轴俯视图。
13.图中:1、动力机身,2、固定机身,3、机架,4、全角度云台,5、俯仰轴,6、云台相机,7、
机身连接模块。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
15.实施例1
16.请参阅图1
‑
2所示,一种全角度多载重搭配的模块化航拍无人飞行器,包括飞行器机身、全角度云台4和云台相机6,飞行器机身分为动力机身1和固定机身2,动力机身1分为左右两个对称的机翼架,各机翼架分别于独立的供电电池连接,动力机身1与固定机身2之间活动连接,全角度云台4与固定机身2连接,全角度云台4上设置有环形的俯仰轴5,固定机身2位于俯仰轴5的环形中心处,云台相机6设置在俯仰轴5上;俯仰轴5的旋转角度为360
°
,云台相机6位于俯仰轴5的旋转节上,跟随俯仰轴5转动;,云台相机6为可拆卸结构,其与俯仰轴5之间通过模块化的装配接口实现对接;固定机身2内部安装有飞行控制器,固定机身的边缘设置有机身连接模块7;动力机身1上设置有配合机身连接模块7的连接节,并通过连接节和机身连接模块7配合与固定机身2活动连接,全角度云台4底部设置有若干个机架3。
17.本实用新型在使用时,首先,将将左右两部分动力机身1分别与一块电池连接,即飞行器的左右两边都独立满足了动力与供电电池,在运输时,飞行器左右两边的动力机身1独立拆开,增加便携性,并且可以有不同动力的电机分组搭配同样的电池,从而在在面对不同的载重需求时,模块化选择不同的动力机身1,三轴的全角度云台4用于控制云台相机6的拍摄角度,俯仰轴5采用环形的动力形式,固定机身2在环形中间设置,飞行控制器安装在此位置;将动力机身1通过机身连接模块7对接在固定机身2上,飞行器即可飞行,由于俯仰轴5采用大环形,围绕着机身,因此可以360
°
拍摄,再加上飞行器的自转,即可实现飞行器全角度拍摄。
18.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
19.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种全角度多载重搭配的模块化航拍无人飞行器,包括飞行器机身、全角度云台(4)和云台相机(6),其特征在于:所述飞行器机身分为动力机身(1)和固定机身(2),所述动力机身(1)为左右两个对称的机翼架,各机翼架分别与独立的供电电池连接,所述动力机身(1)与所述固定机身(2)之间活动连接,所述全角度云台(4)与固定机身(2)连接,所述全角度云台(4)上设置有环形的俯仰轴(5),固定机身(2)位于俯仰轴(5)的环形中心处,所述云台相机(6)设置在所述俯仰轴(5)上。2.根据权利要求1所述的一种全角度多载重搭配的模块化航拍无人飞行器,其特征在于:所述俯仰轴(5)的旋转角度为360
°
,所述云台相机(6)位于俯仰轴(5)的旋转节上,跟随俯仰轴(5)转动。3.根据权利要求2所述的一种全角度多载重搭配的模块化航拍无人飞行器,其特征在于:所述云台相机(6)为可拆卸结构,其与俯仰轴(5)之间通过模块化的装配接口实现对接。4.根据权利要求3所述的一种全角度多载重搭配的模块化航拍无人飞行器,其特征在于:所述固定机身(2)内部安装有飞行控制器,固定机身的边缘设置有机身连接模块(7)。5.根据权利要求4所述的一种全角度多载重搭配的模块化航拍无人飞行器,其特征在于:所述动力机身(1)上设置有配合机身连接模块(7)的连接节,并通过连接节和机身连接模块(7)配合与固定机身(2)活动连接。6.根据权利要求4所述的一种全角度多载重搭配的模块化航拍无人飞行器,其特征在于:所述全角度云台(4)底部设置有若干个机架(3)。
技术总结
本实用新型公开了一种全角度多载重搭配的模块化航拍无人飞行器,包括飞行器机身、全角度云台和云台相机,所述飞行器机身分为动力机身和固定机身,所述动力机身分为左右两个对称的机翼架,各机翼架分别于独立的供电电池连接,所述动力机身与所述固定机身之间活动连接,所述全角度云台与固定机身连接,所述全角度云台上设置有环形的俯仰轴,固定机身位于俯仰轴的环形中心处。本实用新型的有益效果是:本装置通过无人飞行器与云台的整体结合,让云台的俯仰方向可以360
技术研发人员:车欣
受保护的技术使用者:车欣
技术研发日:2021.06.30
技术公布日:2022/1/4